
Fターム[5H301EE01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623)
Fターム[5H301EE01]の下位に属するFターム
機械的ガイドであるもの (150)
非機械的ガイドであるもの (227)
経路全体に渡って連続的に形成されるもの (123)
経路の一部に形成されるもの (26)
特殊な経路を有するもの (28)
単一経路を形成するガイドが複数あるもの (6)
ガイド自体の構成の限定 (41)
Fターム[5H301EE01]に分類される特許
1 - 20 / 22
搬送車システムのシミュレーションシステムとシミュレーション方法

【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
駆動ユニット方向検出システム

【課題】各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにすることにある。
【解決手段】駆動ユニット22の車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニット22の車体に対する360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくデータ格納装置29,39と、回転情報テーブル根拠情報と回転角度値とから駆動ユニット22の車体に対する向きを導出する主制御回路40とを備える。ここで、データ格納装置29,39は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されている。
(もっと読む)
無人搬送車装置
【課題】本線軌道の渋滞を防止することにより、搬送車の平均速度を向上させ、同一搬送車台数で搬送能力を増加させるようにした無人搬送車装置を提供すること。
【解決手段】並行する本線軌道1、2と、本線軌道1、2を短絡して連結する短絡軌道3とを備えた無人搬送車装置において、短絡軌道3を、本線軌道1、2に分岐合流する横行軌道31、32と、本線軌道1、2と並行し、複数の搬送車Aを滞留させる直進軌道33とにより構成する。
(もっと読む)
走行車システム
【構成】 走行ルートの周回距離Lとこれを複数に分割した分割距離Pとを記憶し、エンコーダ信号eから e modP=d e=cP+d となる値c,dを求めて、(c,d)を現在位置とする。
【効果】 1個の基準マークでかつ簡単な補正演算により、エンコーダへの補正を施すことができる。
(もっと読む)
移動ロボット
【課題】 監視員の確認負担を軽減した移動ロボットの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、監視区域の現状態及び予め設定された監視区域における重要エリアとを記憶する記憶部と、異常を検知すると記憶部に異常状態を記憶させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自己の現在位置を検出する位置検出部と、異常を検知したときの現在位置が重要エリア外か否かを判定する位置比較手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、重要エリア外の位置において異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
走行車システム
【構成】 走行ルートのレイアウト情報で、開放距離を示すパラメータを指定し、コントローラと走行車8,10とが共有する。各走行車8,10はレイアウト上のパラメータを開放距離に変換するテーブルを持ち、ブロッキングしたポイントを通過後、開放距離だけ走行すると、ブロッキングの解除を地上コントローラ3へ要求する。
【効果】 レイアウト情報を複雑にせずに、複数種の走行車に対して区間毎に最適な車間距離を設定できる。
(もっと読む)
搬送台車システム
【構成】 ロードポート間通信により、各ロードポートは、他のロードポートでの搬送要求タイマの設定値Tと目標搬送量からの変位ΔHとを学習する。そして(T,ΔH)の平面を適宜の評価関数で評価し、自己よりも効率の高いロードポートを発見すると、自己の搬送要求タイマの値を高効率のロードポートでの値に近づける。
【効果】 自律的に搬送要求タイマを更新でき、しかもシステムの効率を極大化できる。
(もっと読む)
搬送設備の運転支援方法
【課題】予測可能な状況のもとでの生産再開の手段を提供し、生産への影響を最小限に低減するようにした搬送設備の運転支援方法を提供すること。
【解決手段】搬送装置によりワークを複数の供給保管装置と製造装置とに順次搬送するようにした搬送設備において、搬送設備が停止した後の復旧を行うに際し、停止した搬送設備の状況を特定するとともに、特定した状況を初期状態として、予め準備した複数のシナリオに基づいてシミュレーションを行い、シミュレーションの結果の中から生産への影響が最も好ましい結果を得たシナリオに従って復旧作業を行う。
(もっと読む)
速度制御方法及び速度制御装置
【課題】物体の通過する軌跡上の各点における曲率に応じた速度で物体を移動させる速度制御方法の提供。
【解決手段】軌跡の座標データを入力、軌跡上の各点における曲率を計算、算出された各点での曲率から各点での物体の速度を(1)式に示される角速度を用いた(2)式にて計算、算出された各点での速度を物体に出力。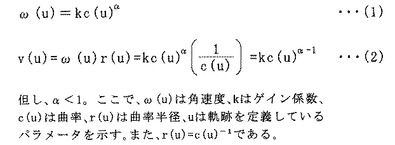 (もっと読む)
(もっと読む)
部品供給システム
【課題】生産ラインの効率を向上させることができる部品搬送システムを提供する。
【解決手段】一定周期でID信号を発信するRFIDタグ1を生産ライン2を流れる半製品3に取り付けて、AGV8を用いた従来の大規模な部品供給システムと生産ライン2の間に配置した部品供給カート5を、前記RFIDタグ1からの電波7の受信時刻の差が最小となるように制御することにより、前記部品供給カート5を半製品3に追随して自走させる。
(もっと読む)
顧客移動経路情報収集装置
【課題】 簡易な構成で顧客の移動経路を正確に検出する顧客移動経路情報収集装置を提供する。
【解決手段】 ショッピングカートに取付けた床面を撮像する撮像手段7及び角速度を検出する角速度検出手段9と、撮像した床面画像から走行方向及び走行速度を検出する走行状態検出手段、ショッピングカート移動開始時に初期情報を設定する初期情報設定手段及び撮像した画像情報から床面に設けた絶対位置及び方位を表す位置マーカを検出する位置マーカ検出手段10と、角速度と走行方向及び走行速度と位置マーカの絶対位置及び方位とを収集して記憶する経路情報記憶手段11と、位置マーカの絶対位置及び方位から少なくとも角速度を補正する角速度補正手段と、前記初期情報と走行方向及び走行速度と補正された角速度とから移動位置及び方位を演算する移動位置演算手段と、移動位置及び方位を蓄積して移動経路情報を形成する移動経路情報形成手段とを備えている。
(もっと読む)
顧客移動経路情報収集装置
【課題】 簡易な構成で自動的にメンテナンスを行うことができる顧客移動経路情報収集装置を提供する。
【解決手段】 顧客が使用するショッピングカート3に取付けた走行状態を検出する走行状態検出手段と、前記ショッピングカートのカート置場4に配設されて当該ショッピングカートの移動開始時に初期位置及び方向を設定する初期情報設定手段17と、前記走行状態検出手段で検出した走行状態に基づいて移動経路情報を形成する移動経路情報形成手段と、前記カート置場に配設されて移動経路情報形成手段のメンテナンスを行う自動メンテナンス手段16,18とを備えている。
(もっと読む)
搬送台車システム
【構成】 搬送台車24の行先がポイント20からポイント18に変更されると、搬送台車24は最寄りの分岐ポイント10までに新たな走行ルートを算出できるように速度制御する。搬送台車24は、不要になったブロッキングの、分岐ポイント10の直進、合流ポイント14の直進、分岐ポイント12の分岐をキャンセルし、分岐ポイント10の分岐のブロッキングを再要求し、新たな走行ルートに基づいて走行する。
【効果】 行先変更時に搬送台車が停止する必要がないので、搬送効率が改善する。
(もっと読む)
搬送車システム及びルートマップの作成方法
【構成】 搬送車システムのレイアウト上位置が既知な点に基準マーク18を設け、その座標をルートマップに記載する。移載を行う位置に移載マーク20を設け、基準マーク18からの距離を搬送車14のエンコーダで求め、ルートマップに記載する。実走行時は、基準マーク18を検出すると搬送車14の内部座標を基準マークの座標で更新し、移載マーク20の位置で停止する。
【効果】 ルートマップを容易に作成できる。
(もっと読む)
搬送車システム
【構成】 搬送車5に振動センサやトルクセンサなどを搭載し、異常データを搬送車コントローラ10に送信する。搬送車コントローラ10は、異常データを区間別と搬送車別に記憶し、同じ区間で複数の搬送車から異常データが得られたか、正常区間でも搬送車から異常データが生じるかから、異常のある走行ルートの区間と搬送車とを特定する。
【効果】 走行ルートと搬送車の双方の状態を検査でき、しかも問題が走行ルートにあるのか搬送車にあるのかも判別できる。
(もっと読む)
自動搬送装置
【課題】 本発明は、搬送機器に載せる搬送物の有無や搬送物の移動パターンなどの搬送条件が搬送毎に変化した場合でも、精度良く位置ズレの修正を行うことができる自動搬送装置を提供する。
【解決手段】 搬送物を搬送する搬送機器1と、搬送機器1の移動を制御するコントローラ2とを備える自動搬送装置であって、コントローラ2は、目的の停止位置に対し搬送機器が最初に停止した位置である初期停止位置から、目的の停止位置までの位置ズレ量を搬送機器1より受信し、当該位置ズレ量を補正量として、位置ズレ量が生じた際の搬送機器1の搬送条件と共に記憶装置4に入力する入力処理部3と、記憶装置4に蓄積された搬送条件及び補正量に基づいて、指示する修正量を搬送機器1に出力する出力処理部5とを備える。
(もっと読む)
搬送車システム
【構成】 搬送車コントローラ6bの管理エリア内の上流部の移載位置10bで、荷積みする搬送指令が発生する。これを割り付ける搬送車が無い場合、コントローラ6bは上流側のコントローラ6cに搬送指令を転送し、コントローラ6cは空きの搬送車8cがあれば、移載位置10bでの荷積みを割り付ける。
【効果】 搬送車コントローラ間の自律制御により、搬送指令を効率的に実行できる。
(もっと読む)
搬送車システム
【構成】 各ゾーンコントローラは、特定エリアへのブロッキング要求を天井走行車から受け付けると待行列に追加し、待行列の先頭の天井走行車にブロッキング許可を与え、走行を完了するとブロッキングを解除する。待行列の天井走行車の台数を、特定エリアの渋滞状況を示す指標として時間平均を求め、コントローラから天井走行車にアナウンスする。
【効果】 走行経路の渋滞状況を的確に把握できるので、効率的な走行経路を天井走行車が選択できる。
(もっと読む)
ICタグ対応移動型ロボット位置検知システム
【課題】移動型ロボットの移動走行軌道の図示化を、労力を要さずにおこない、移動型ロボットの位置表示及び移動走行軌道の変更を容易におこなえる、ICタグ対応移動型ロボット検知位置システムを提供する。
【解決手段】移動型ロボット102の移動走行軌道上に非接触無線ICタグ101を配置し、移動型ロボット102にリーダ・ライタアンテナ部103、リーダ・ライタ本体部104、無線部105、制御部106を設置し、基地局107において、非接触無線ICタグ101からの情報及び、移動型ロボット102の動作状況情報に基づき、移動型ロボット102の移動走行軌道を図示化し、非接触無線ICタグ101情報の読み取り位置を移動走行軌道図上に示し、基地局107からの指示情報により、移動型ロボット102の移動走行軌道の変更をおこなう。
(もっと読む)
無人搬送車運行制御システム
【課題】 無人搬送車用の走行経路として走行長の異なる複数の分岐経路が設定される生産ラインにおいて、全ての無人搬送車間でのバッテリの消費電力量の平均化及び各無人搬送車の待機時間の短縮化を図り、各無人搬送車が走行すべき分岐経路を選択し得る運行制御システムを提供する。
【解決手段】 運行制御システムにおいて、各無人搬送車が分岐経路手前の分岐地点に到着した時点で、各無人搬送車の消費電力量と、それ以外の無人搬送車の消費電力量とが比較され、分岐地点に到着した無人搬送車の消費電力量の、他の無人搬送車の消費電力量に対する大小関係が求められる。分岐地点に到着した無人搬送車の消費電力量が他の無人搬送車の消費電力量に対して小さいと判断された場合、走行長の長い分岐経路が選択され、他方、分岐地点に到着した無人搬送車の消費電力量が他の無人搬送車の消費電力量に対して大きいと判断された場合には、走行長の短い分岐経路が選択される。
(もっと読む)
1 - 20 / 22
[ Back to top ]