
Fターム[5H301EE03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 非機械的ガイドであるもの (227)
Fターム[5H301EE03]の下位に属するFターム
磁気又は電磁誘導を利用するもの (141)
光を利用するもの (63)
Fターム[5H301EE03]に分類される特許
1 - 20 / 23
無人搬送車による台車の自動搬送システム
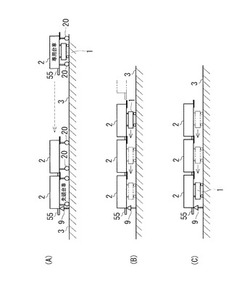
【課題】簡易な機械式の構成で実施する、無人搬送車による台車の自動搬送システムを提供する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
(もっと読む)
搬送車システム

【課題】効率的な搬送作業を実現するための搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた経路105と、経路105に沿って走行する台車140と、台車140の制御を行うコントローラ110とを備える搬送車システム100であって、台車140は、走行方向に並べて配置された第一載置台141と第二載置台142とを有し、方向転換することで、第一載置台141および第二載置台142のいずれをも走行方向における前方とすることが可能であり、コントローラ110は、荷物の移載作業の内容と荷物の載置状況とを用いて、第一載置台141および第二載置台142のいずれを前方にすべきかを決定する決定部112と、台車140の走行を制御することで、台車140を、決定された第一載置台141または第二載置台142が前方である状態で、目的ステーションに到着させる走行制御部114とを有する。
(もっと読む)
無人搬送システム
【課題】停止マークの汚れや欠けに強い無人搬送システムを提供する。
【解決手段】本発明に係る無人搬送システムは、路面に敷設された誘導ライン2と、誘導ライン2上に設けられた停止マーク3と、誘導ライン2に沿って走行するとともに、停止マーク3を目印にして停止する無人搬送車とを備えたシステムである。停止マーク3は、誘導ライン2とは異なった色で着色された部分(3b、3d)を有し、色の違いにより交差する2本の線X、Yを認識させ得るようになっている。また、無人搬送車は、該2本の線X、Yの交点を目印にして停止するよう構成されている。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
自動搬送車
【課題】荷物を積載して自動走行する自動搬送車において、旋回走行させる際のスペースを狭くすることができ、かつ走行時間の短縮化を図ることにある。
【解決手段】荷物を積載する荷台を具備する車体11と、車体11下側の前位置および後位置のそれぞれに設置され且つそれぞれ独自に駆動操舵される前側駆動操舵装置20および後側駆動操舵装置30とを備える。自動走行のうち、前進走行から横走行に切り替わる間の前側駆動操舵装置20および後側駆動操舵装置30は、前進走行から横走行に切り替えつつ、車体11を転回させるように旋回走行させるものとなっている。
(もっと読む)
無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法
【課題】前進モードのときと後進モードのときとで停止位置を一致させることができる無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法を提供する。
【解決手段】床面に敷設された軌道を検出する軌道検出センサをそれぞれ備える複数の駆動ユニットを有し、前進後進可能な無人搬送車の前後進モードの切替を制御する装置であって、複数の駆動ユニットにそれぞれ設けられたマーカ検出センサでコマンドマーカを検出したら、前後進モードの切替指令であるか否かを判定するモード切替判定手段(ステップS1)と、前後進モードの切替指令があったら、進行方向側の駆動ユニットのマーカ検出センサをアクティブ状態にし、反対側の駆動ユニットのマーカ検出センサを休止状態にするアクティブセンサ切替手段(ステップS2)と、を有する。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、現在位置を検出する位置検出部と、検知部が異常検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部の異常検知に基づく異常情報及び現在位置を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段とを備え、監視センタは、重要エリアを記憶するセンタ記憶部と、自動復旧モードを含む複数のモードを管理するモード設定手段と、移動ロボットから異常情報を受信すると動作する報知部と、移動ロボットの現在位置と重要エリアを比較する位置比較手段と、自動復旧モードであるときに重要エリア外で検知された異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段とを備える。
(もっと読む)
無人搬送車の制御方法
【課題】無人搬送車において、外部との協調動作を行う際の制御方法を提供するものである。
【解決手段】目標速度が設定されてない被牽引区間では走行速度制御60を停止し且つ操舵制御40のみを有効とした被牽引モードに切り替える運転モード切替装置70を搭載したので、被牽引区間では、無人搬送車を外部との協調動作により移動させる際、駆動輪を駆動回転させることなく、マーキング線検出センサ10で検出されるマーキング線aに沿って走行するべく操舵輪を操舵することができる。
(もっと読む)
産業車両の操舵制御装置
【課題】 走行方向にかかわらず、車両を誘導線に沿って安定的に走行させることができるようにする。
【解決手段】 誘導線の位置を検出する前後2つの位置検出手段と、車両の走行方向を判定する判定手段と、誘導線の位置と走行方向とに基づいて転舵輪の目標操舵角を算出する算出手段と、転舵輪の実際の操舵角を検出する角度検出手段と、実際の操舵角が目標操舵角と一致するよう駆動装置を制御する制御手段とを備える。
算出手段は、走行方向が転舵輪側であると判定される場合には、転舵輪側の位置検出手段により検出される誘導線の位置に基づいて目標操舵角を算出し、走行方向が転舵輪と反対側であると判定される場合には、両位置検出手段により検出される誘導線の位置に基づいて目標操舵角を算出する。
(もっと読む)
無人搬送車の車輪磨耗量の推定方法と車輪交換時期の判定方法、及び、無人搬送車の走行制御方法とその装置。
【課題】 無人搬送車の車輪の磨耗を適切に把握してその走行状態を制御するとともに、車輪の交換時期を適正に判定する方法を提供する。
【解決手段】 無人搬送車10の経路の直進区間内に所定の距離の計測区間を設けて、上記無人搬送車10が上記計測区間を一定の速度で走行したときの車輪12の回転数をエンコーダ14で計測する操作を、上記無人搬送車10が計測区間をN回通過するまで繰り返し、各回ごとに計測したパルス数Piの平均値Pを算出し、この平均値Pと上計測区間の実際の距離をYとから、単位パルス当たりに車輪12の進む実際の距離Xを算出し、このXが予め設定された交換時期の車輪径Rcと上記平均値Pとから求められる単位パルス当たりの交換時期距離Z以下になった場合には車輪交換時期であると判定するようにした。
(もっと読む)
移動監視ロボット
【課題】 巡回経路上の重点的な監視場所と、そうでない場所を推測困難として、警備能力を向上する。
【解決手段】 移動監視ロボット2は、所定の移動経路に沿って移動手段で自律移動して警備情報を収集する。移動監視ロボット2の記憶部21は、移動経路上において必ず停止する位置である重要監視位置を予め記憶している。停止位置テーブル処理部22は停止位置生成部に相当し、移動経路に沿って移動を開始する前に移動経路上において停止する所定数の停止位置をランダムに生成する。移動制御部13は、自己の現在位置に基づき、現在位置が重要監視位置または停止位置と一致すれば当該位置に所定時間停止するように移動手段11を制御する。
(もっと読む)
搬送台車システム
【課題】 走行する領域のマップデータを保持し、当該マップデータに従って走行して搬送を行う複数の台車1と、該台車を管理するコントローラ3,7を備えた搬送台車システムにおいて、搬送経路のマップデータが変更になった場合に、マップデータを効率よく迅速に更新しつつ、台車1による通常の物品搬送も中断することなく行う。
【解決手段】コントローラ3,7が、台車を指定する手段と、指定した台車1のマップデータを更新する手段を備えており、優先順位の高い台車1から順に更新を行うと共に、更新を行わない台車1は、通常の搬送作業を継続する。
(もっと読む)
搬送台車システム
【課題】別のゾーンへ分岐、合流する際のブロッキング制御を良好に行うことを課題とする。
【解決手段】複数のゾーン10,…,10を有し、各ゾーン10毎にコントローラ11,…,11を設けた搬送台車システム100であって、各コントローラ11に、隣接するゾーン10のコントローラ11に対して、分岐または合流箇所におけるブロッキング制御を行うための情報を送信する手段を設けたところに特徴を有する。
(もっと読む)
移動ロボット及び移動ロボットによる監視システム
【課題】充電設備までに帰還に要するバッテリ量に基づきバッテリ減少を判定し、減少時の状況に応じた動作を可能とする。
【解決手段】遠隔の監視センタと通信する通信部と、各部に電源を供給するバッテリと、前記バッテリの残量を検出する残量検出部と、自己の現在位置を認識する位置認識部と、環境内に設定された基準位置を記憶した記憶部と、現在位置から前記基準位置までの移動経路を探索する経路探索部と、前記経路探索部が探索した経路の移動に要するバッテリ量を算出する移動バッテリ量算出部と、前記残量検出部が検出したバッテリ残量と前記基準位置までの移動に要するバッテリ量との差が所定しきい値以下になると前記通信部よりバッテリ警告信号を送信する残量警告部と、を備えたことを特徴とする移動ロボット。
(もっと読む)
移動ロボット及び遠隔操作システム
【課題】ロボットと遠隔の操作者側との間に伝送遅延が生じていてもロボットを安全に移動させる
【解決手段】遠隔操作により指示された方向に移動手段にて移動する移動ロボットであって、少なくとも移動方向前方の障害物を検出する検出部と、前記検出部が検出した障害物までの距離を算出する障害物判定部と、監視センタから移動方向を受信する通信部と、前記障害物までの距離に基づき該障害物に接触する前に停止可能な移動速度を算出する速度算出部と、を備えて、前記監視センタから受信した移動方向に前記速度算出部が算出した速度で移動することを特徴とした移動ロボット。
(もっと読む)
物品搬送設備
【課題】 構成の複雑化を招くことなく、デッドロック状態を極力早く回避すること。
【解決手段】 管理部5は、複数の移動経路1のすべてから複数の移動体2が交差点D2に向けて同時に進入する場合には、退避対象の移動体2aに対して、退避用運行指令情報T1を移動制御手段4に指令し、かつ、退避対象の移動体2a以外の移動体2に対して、停止用運行指令情報T2を移動制御手段4に指令し、次に、退避対象の移動体2a以外の移動体2の一つに対して、指定通過用運行指令情報T3を移動制御手段4に指令する形態で、退避対象の移動体2a以外の移動体2に対して、通過用運行指令情報を移動制御手段4に順次指令し、その後、退避対象の移動体2aに対して、復帰通過用運行指令情報を移動制御手段4に指令するように構成されている。
(もっと読む)
移動ロボット
【課題】 移動に伴う障害物検出位置のズレの影響を除去して障害物の誤検知を防止可能にする。
【解決手段】 移動ロボット1は、所定の環境に対応する環境地図73と環境地図73を複数の領域に区分し各領域ごとの投票値を記憶する投票テーブル77とを記憶する記憶部15と、自己の位置に対応した環境地図上の位置を認識する自己位置検出部9と、上記環境内を走査して被測定物の相対位置を検出する障害物検知部11と、検出された被測定物の相対位置に対応する領域に投票値を加算し投票テーブル77に記憶する投票部91と、投票テーブル77の投票値が所定のしきい値以上となったときに該当領域に物体が存在すると判定する物体判定部93とを備えている。
(もっと読む)
移動ロボット
【課題】 移動に伴う障害物検出位置のズレの影響を低減して障害物の誤検知を防止可能にする。
【解決手段】 移動ロボット1は、所定の環境に対応する環境地図73を記憶する記憶部15と、自己の位置に対応した環境地図上の位置を認識する自己位置検出部9と、上記環境内を走査して被測定物の相対位置を検出する障害物検知部11と、検出された被測定物の相対位置に対応する環境地図上の位置に投票値を加算する投票部91と、検出された被測定物の相対位置に基づいて投票部91による投票値に重み付けする投票値算出部97と、加算された投票値の累積が所定のしきい値以上となったときに環境地図上の該当位置に物体が存在すると判定する物体判定部93と、を備え、投票値算出部97は、検出された被測定物との距離が大きくなるほど重みを小さくする反比例等の減少関数に従った重み付けにより投票値を算出する。
(もっと読む)
移動ロボット、移動ロボット制御方法および移動ロボット制御プログラム
【課題】移動の目印として適切なランドマークを利用することにより、精度よくかつ効率的に自己位置を特定することのできる移動ロボットを提供する。
【解決手段】ランドマークに基づいて移動する移動ロボット1であって、移動した先のロボット位置において、ランドマーク候補を検出するランドマーク候補検出手段112と、ランドマーク候補に対する至ランドマーク距離を特定する至ランドマーク距離特定手段114と、至ランドマーク距離に基づいて、ランドマーク候補に対する適切性評価値を算出する適切性評価値算出手段114と、ランドマーク候補の適切性評価値と、ランドマーク格納手段103において登録ランドマーク対応付けて格納されている適切性評価値とに基づいてロボット位置を特定するロボット位置特定手段118とを備えた。
(もっと読む)
車両駐車装置及び車両駐車方法
【課題】簡素な装置構成によって駐車目標位置に車両を駐車させる。
【解決手段】制御部8が、車両の駐車目標位置と、車両の駐車目標位置から運転者の降車位置までの間の車両の走行軌跡とをそれぞれ駐車位置記憶部3及び走行軌跡記憶部4に記憶し、リモートコントローラ9から制御信号を受信した際、記憶されている走行軌跡に沿って車両を駐車目標位置に移動させる。これにより、複雑な演算処理を行う必要性が無くなり、演算負荷を低減させることができるので、簡素な装置構成によって駐車目標位置に車両を駐車させることができる。
(もっと読む)
1 - 20 / 23
[ Back to top ]