
Fターム[5H301EE04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 非機械的ガイドであるもの (227) | 磁気又は電磁誘導を利用するもの (141)
Fターム[5H301EE04]の下位に属するFターム
Fターム[5H301EE04]に分類される特許
1 - 20 / 35
自動搬送システム
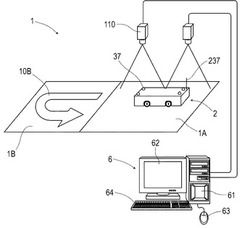
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
操舵制御装置

【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
無人搬送車の搬送システム
【課題】番地板や番地センサ等の動作位置指示機構を省略し、AGVと搬送経路の構造を簡単化する。
【解決手段】駆動輪と非磁性金属材であるアルミニウムを検出可能な左右1対の搬送経路検出センサを有するAGV10を備え、製造工場1の床面上にアルミニウムにより形成されたガイド部G1〜GN+1とガイド部を遮断した複数の不設置部P1〜PNとによりループ状の搬送経路2を形成している。各不設置部にはAGVの動作位置とこれらの動作位置で実行する停止動作、進路変更動作、発進動作、物品降ろし動作、物品積載動作のうち少なくとも1つの動作を指示する動作位置指示機能がオフラインティーチングにより付与されている。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自動搬送車の制御方法
【課題】自動搬送車を横行又は斜行させた後、新たな導線への追従状態に移行するための制御方法であって、新たな導線に円滑に乗り移ることで、追従状態への移行に要する時間を短縮可能な自動搬送車の制御方法を提供すること。
【解決手段】自動搬送車2が横行でガイドライン12へ接近して乗り移るための制御方法は、駆動ユニット3をガイドライン12に接近させる第1の走行ステップと、ラインセンサ351がガイドライン12を検出した後、再びガイドライン12を検出しなくなるまで駆動ユニット3をそのまま前進させる第2の走行ステップと、第2の走行ステップの後、ラインセンサ351によりガイドライン12を再検出できるように駆動ユニット3を操舵する第3の走行ステップと、ラインセンサ351によるガイドライン12の再検出に応じて追従走行制御への切換を実行する移行ステップと、を含んでいる。
(もっと読む)
走行車
【課題】経路上に障害物が存在し、かつ、即座に当該障害物が除去されない状況が生じた場合であっても、荷物の搬送等の作業を効率よく行うことのできる走行車を提供すること。
【解決手段】障害物センサ110と、障害物センサ110による検知結果に応じて、走行100車に障害物を回避するための第一の回避動作を行わせるコントローラ120と、障害物の位置を示す位置情報と、第一の回避動作における走行車の左右方向の回避幅を示す回避幅情報とを記憶する記憶部130とを備え、コントローラ120は、(a)障害物センサ110が、位置情報に示される位置における障害物の存在を、走行車100と障害物との距離が第一の距離以下である時点において検知した場合、(b)走行車100と障害物との距離が第二の距離に至る前に、走行車100に、記憶部130に記憶されている回避幅情報を用いた第二の回避動作を開始させる走行車100。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
自律移動装置とこれを用いた搬送方法
【課題】複数の積載体(例えば台車)が、互いの隙間を詰めて置かれたり、乱雑に配置されていたりする場合であっても、高度な制御を必要とすることなく、積載体を保持(例えば連結)でき、かつ、所望の搬送先へ自律移動できる自律移動装置を提供する。
【解決手段】搬送物が積載される積載体1を保持した状態で自律移動することで該積載体を搬送する自律移動装置10。積載体1と分離した状態から該積載体を保持可能な保持機構3と、所望の搬送先へ保持機構3を移動させる移動機構5と、受動モードと自律モードとの間で切換可能な制御部7と、を備える。制御部7は、受動モードにある時に、外部からの動作指令に従って保持機構3と移動機構5を動作させ、自律モードにある時に、移動機構5を自律制御して所望の搬送先へ保持機構3を移動させる。
(もっと読む)
電磁誘導式電動走行車
【課題】走行路に沿って敷設された誘導線から発生する磁界を検出して舵取り制御を行う電磁誘導式電動走行車が走行路から外れたときに、走行路への復帰を自動的に行わせる。
【解決手段】車体の誘導線からの位置ずれ量が、舵取り制御が可能な範囲を越えたときに脱線したとの判定を行う脱線判定手段31Eと、脱線が判定されたときに駆動輪3及び舵取り輪2に制動をかけて車体を停止させる脱線時制動制御手段31Fと、脱線判定時に舵が切られていた方向と同じ側に一杯に舵を切った状態で、停止させられた車体を舵取り制御が可能になる位置まで後退させて停止させるように舵取り装置4と電動駆動装置29と制動装置23とを制御する脱線復帰制御手段31Gとを設けた。
(もっと読む)
無人搬送車の交差点制御装置及び交差点制御方法
【課題】交差点内の障害物を直接検出して、交差点における進入、退出の制御を行う無人搬送車の交差点制御装置及び交差点制御方法を提供する。
【解決手段】交差点Xを、エリアA、B1、C1、D1、E1、B2、C2、D2、E2に分割すると共に、各エリアにおける障害物の有無及び変化を検知する光エリアセンサ22を交差点Xに設け、交差点Xに進入してきたAGV11を、エリアB2に待機させると共に、光エリアセンサ22を用いて、全エリアにおける障害物の検知を行い、エリアA、B1、C1、D1、E1に障害物が無い場合、待機させたAGV11に交差点Xへの進入許可を与える。
(もっと読む)
無人搬送車
【課題】ガイドテープの損傷を抑制し、ガイドセンサの数を削減し装置構成の簡略化・組立容易を実現し、走行上の安全性を向上させた無人搬送車を提供する。
【解決手段】円柱状ワークを搭載する走行台車と、走行台車を前後左右走行自在に走行路面上に支持する4つのキャスタ輪と、走行台車に推進力を与える2つの駆動輪と、走行路面上の前後進用ガイドテープ、横行用ガイドテープ及び停止マーカを検出する複数のガイドセンサとを有する無人搬送車において、ガイドセンサが、長手方向中心線上に前方側と後方側とに1つずつ配置された前後進ガイドセンサと、短手方向中心線上に1つ又は2つ配置された横行ガイドセンサとからなるとともに、各ガイドセンサが走行方向を検出する誘導センシング機能と停止位置を検出する停止センシング機能とを兼ね備えていることによって前記の課題を解決する。
(もっと読む)
無人搬送車の横行姿勢制御装置及び横行姿勢制御方法
【課題】装置を複雑化することなく、また製造コストを安価に抑えることができる無人搬送車の横行姿勢制御装置及び横行姿勢制御方法を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢制御装置であって、車両が正しい姿勢であるときは前側の駆動ユニットと後側の駆動ユニットとが同時に通過するように軌道に設けられたチェックポイントを、前側の駆動ユニットと後側の駆動ユニットとが通過する時間差に基づいて車両の横行状態を推定する横行状態推定手段(S2)を有する。
(もっと読む)
無人搬送車の走行モード切替制御装置及び切替制御方法
【課題】製造コストを安価に抑えることができる無人搬送車の走行モード切替制御装置を提供する。
【解決手段】駆動ユニット11に設けられた軌道検出センサ11bで、床面に敷設された軌道20を検出しながら走行する無人搬送車1の走行モード切替制御装置であって、走行モードの切り替え指令があったら駆動ユニット11の方向転換を開始するユニット方向転換手段と、軌道検出センサ11bが軌道不検出状態から軌道検出状態になったら駆動ユニット11の方向転換完了を判定する方向転換完了判定手段と、方向転換完了を判定したら駆動ユニットの方向転換を停止して切り替え後のモードで走行する走行制御手段と、を有する。
(もっと読む)
無人搬送車の横行姿勢補正装置及び横行姿勢補正方法
【課題】製造コストを安価に抑えることができる無人搬送車の横行姿勢補正装置を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢補正装置であって、横行モード時に前側の駆動ユニットと後側の駆動ユニットが独立して停止位置で停止指令の有無を判定する停止判定手段(ステップS10,S20)と、停止指令を受けて、対応する前側の駆動ユニット又は後側の駆動ユニットが停止するユニット停止手段(ステップS11,S21)と、前側の駆動ユニット及び後側の駆動ユニットのうちで車両の移動方向に対して先行する駆動ユニットが停止指令を受けて停止後、後行する駆動ユニットが停止指令を受けて停止するまで、先行する駆動ユニットの停止状態を維持する停止維持手段(ステップS11,S21)と、を有する。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
レールレス移動ラック
【課題】レールレス移動ラックにおいて侵入検知センサの光軸はずれを抑制すること。
【解決手段】移動ラックには隣り合う他のラックとの間への障害物の侵入を投光部271で出射された光が受光部272で受光されているか否かによって検出する侵入検知センサ27が設けられている。侵入検知センサ27は回転モータ29により回動可能に設けられ、回転モータ29は投光部271から出射された光が受光部272に入射するように台車の姿勢に対応して制御盤によって制御される。
(もっと読む)
搬送車の操舵装置
【課題】手動走行時における操舵性を向上させつつ、切換機構が万一壊れた場合であっても手動走行を可能とすること。
【解決手段】操舵輪のアクスルシャフト21に対して、操舵輪を操舵する操舵モータ23の動力を伝達可能な伝達状態と伝達不能な非伝達状態に切り替える電磁ツースクラッチ24を独立して配設する。そして、電磁ツースクラッチ24のツースクラッチシャフトにはツースクラッチギア26を設けるとともに、アクスルシャフト21にはツースクラッチギア26と噛み合うアクスルシャフトギア22を設け、アクスルシャフトギア22とツースクラッチギア26により動力を伝達可能な状態でアクスルシャフト21と電磁ツースクラッチ24を連結する。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、監視区域を移動して検知部が異常を検知すると監視センタに異常信号を送信し、異常が検知される該異常を保持する記憶部と、監視センタから自動復旧信号を受信したときに、検知部が前記異常を検知しなくなると前記異常の保持を解除する復旧処理を実行する復旧処理部と、異常の検知により移動を停止させ、該異常の保持が解除されると移動を再開させる移動制御部とを備え、監視センタは、異常信号を受信したときに動作する報知部と、複数の動作モードを管理するモード設定部と、異常信号を受信したとき、自動復旧モードであれば前記報知部の動作を禁止して移動ロボットに自動復旧信号を送信し、自動復旧信号を送信しても移動ロボットが異常の保持を解除しない場合に報知部を動作させる自動復旧制御部とを備える。
(もっと読む)
無人搬送車体およびその制御方法
【課題】無人搬送車体を転回用の特別なスペースを要することなく無人搬送車体が走行出来るスペースで確実に旋回させる。
【解決手段】車体底部に車輪3、4等が設けられ、該車輪のうち左右の駆動輪11a、11bが回転制御可能とされ、搬送路の誘導帯を検知するセンサ14a、14b、14cが進行方向の前方側に少なくとも左右一対で設けられている。さらに該センサの一方が検知オフとなり、該検知オフが所定時間継続し、かつ、全てのセンサが検知オフとなったとき、前記誘導帯が進路変更部であると判定して、前記一方のセンサの反対方向の駆動輪を逆転させる指令をして車体を旋回させる制御部15を備える。無人搬送車体が走行出来るスペースで無人搬送車体を確実に旋回させることができる。この結果、無人搬送車体の利用範囲が広がり、該利用分野でのマテリアルハンドリングが向上する。
(もっと読む)
無人搬送車の交差点分岐制御方法およびその装置
【課題】低コストで進行方向を制御する無人搬送車の交差点分岐制御方法を提供する。
【解決手段】本発明は、交差点通過時にカウントするカウンタと、搬送時の進行方向を制御する制御手段8bからなるコントローラ8を備えた無人搬送車において、制御手段は、カウント数毎に対応する交差点と、この各交差点での進行方向を記憶し、交差点通過中に前記カウンタがカウントしたカウント数に対応する、無人搬送車が次に通過する交差点の進行方向を読み込み(S8)、現在通過中の交差点を通過後に、読み込んだ次に通過する交差点の進行方向に応じて、無人搬送車の進行方向を案内する軌道に沿って走行するように無人搬送車の進行方向を制御する(S13)無人搬送車の交差点分岐制御方法である。
(もっと読む)
1 - 20 / 35
[ Back to top ]