
Fターム[5H301EE05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 非機械的ガイドであるもの (227) | 磁気又は電磁誘導を利用するもの (141) | ガイドワイヤ (39)
Fターム[5H301EE05]に分類される特許
1 - 20 / 39
無人搬送システム
物品処理設備
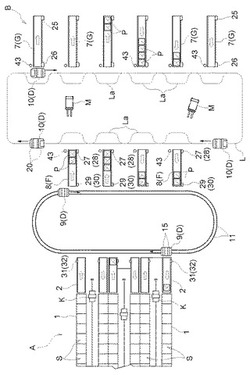
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム

【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
車両用障害物検出装置及びそれを用いた車両
【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
走行データ生成装置
【課題】走行データを生成するために予め記憶手段に記憶しておくデータの量を抑制できる走行データ生成装置を提供すること。
【解決手段】上位プロコンより行先指令が通知されると、無人搬送車両を走行させるために必要な動作コマンド列が、事前に設定されるテーブルから必要分抽出されて、動作コマンド列全体が生成される。本実施形態では、走行経路R上に配置されるステーションCの中から、隣設する3つのステーションCの組み合わせだけを全て求め、その各組み合わせに対応する動作コマンド列をテーブルに設定している。よって、隣設するもの及びしないものを含む2つのステーションCの各々について、その組み合わせを全て(総当たりで)求め、その組み合わせに対応する動作コマンド列をテーブルに設定するよりも、ステーションCの組み合わせの数を少なくできるので、テーブルのサイズを小さくできる。
(もっと読む)
移動装置、移動装置の制御方法及びプログラム
【課題】推測航法から誘導方式へスムーズに切り替えることができる移動装置、移動装置の制御方法及びプログラムを提供する。
【解決手段】誘導線に対する位置偏差を検出する検出手段と、推測航法に係る仮想誘導線に対する位置偏差を算出する算出手段とを備え、前記検出手段が検出した位置偏差又は前記算出手段が算出した位置偏差に基づいて、移動に係る制御量を算出する移動装置において、前記検出手段が検出した位置偏差及び前記算出手段が算出した位置偏差を結合する結合手段と、該結合手段が結合した位置偏差に基づいて、移動に係る制御量を算出する手段とを備える。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
ゴルフカートおよびゴルフカート走行制御システム
【課題】円滑な移動が可能なゴルフカートおよびゴルフカート走行制御システムを提供することである。
【解決手段】電磁誘導線81上を2台のゴルフカート1A,1Baが同じ方向に順に走行する場合、ゴルフカート1Aは、1つ前のゴルフカート1Baからのカート情報を受信しかつ追突防止信号を受信する。その場合、ゴルフカート1Aは徐行または停止する。ゴルフカート1A,1Bbが電磁誘導線82,83上を互いに逆方向に走行する場合、ゴルフカート1Aが、1つ前以外のゴルフカート1Bbからのカート情報を受信し、かつ追突防止信号を受信する。その場合、ゴルフカート1A,1Bbは走行を継続する。
(もっと読む)
無人搬送車の制御装置および無人搬送車の制御方法
【課題】作業効率をより考慮して無人搬送車を走行させる。
【解決手段】交差点エリアの入口を含む交差点エリアにおいて、他の無人搬送車からの停車信号を受信して停車されて再発進するときには(ステップS104,S110)、ベース再発進時間Tbrsと優先度別追加時間Tpとを加算して再発進時間Trsを設定し(ステップS124)、再発進時間Trsまでの間に他の無人搬送車からの停車信号を受信しなかったときに再発進する(ステップS128〜S134)。ここで、ベース再発進時間Tbrsは交差点エリアの入口に到達してからの経過時間が長いほど短い時間となる傾向に設定し、優先度別追加時間Tpは優先度Pが高いほど短い時間となる傾向に設定する。この結果、優先度Pだけに基づき再発進させるものに比べてより作業効率を考慮したものとすることができる。
(もっと読む)
自走式掃除機
【課題】障害物に会わせることなく、確実に部屋の壁沿いに一周させることができる自走式掃除機を提供する。
【解決手段】掃除機本体1を移動させる走行手段(2,3)と、清掃を行う清掃手段(4,5,6)と、壁13あるいは障害物までの距離を検出する測距手段と、電磁波を検知する信号検知部8と、測距手段と信号検知部8の出力信号に基づいて走行手段と清掃手段とを制御する制御手段を備え、外部誘導装置14を設置した部屋内を走行しながら清掃手段で吸引清掃する自走式掃除機であって、信号線15は、部屋の壁際や部屋内に設置された家具の縁に沿った床面上に部屋内を一周するように配設され、外部誘導装置14から印加された所定周波数の誘導信号による電磁波を発し、制御手段は、信号検知部8が誘導信号を検知する時は、信号検知部8の出力信号に基づいて走行手段(2,3)を制御する。
(もっと読む)
無人搬送車の走行制御方法
【課題】交差点を備え、複数のゾーンに分割された走行経路に沿って走行する無人搬送車の交差点の手前での渋滞が緩和されると共に、各ゾーンのうち、ある特定のゾーンへの無人搬送車の集中を回避することのできる無人搬送車の走行制御方法を提供する。
【解決手段】複数の無人搬送車1に対する走行経路2の交差点3内への進入優先度を、各無人搬送車1の進行方向で交差点3を超えた各ゾーンA〜D内の無人搬送車1の台数により決定するので、交差点3の手前での渋滞が緩和されると共に、各ゾーンA〜Dのうち、ある特定のゾーンへの無人搬送車1の集中を回避することができる。
(もっと読む)
自律旋回装置
【課題】操舵輪が接地する床等に影響されることなく適切に操舵できる自律旋回装置を提
供する。
【解決手段】自律旋回装置2は、車両が旋回を開始する始点を検知する位置検知手段6と
、車両の走行した距離を検出する距離検出手段8と、操舵輪36を操舵する操舵装置10
と、操舵輪36が操舵される操舵角を検出する角度検出手段12と、車両の走行する距離
の累積値を車両が旋回するときの操舵輪36の目標操舵角に対応させた旋回データを記録
した記憶手段14と、操舵装置10の動作を制御する制御装置16とを備える。制御装置
16は、車両の始点から走行した距離が旋回データの累積値に達した時点で、操舵輪36
の操舵角が旋回データの目標操舵角に合致するように、操舵装置10を動作させる。
(もっと読む)
無人搬送台車の進路変更方法および進路変更装置
【課題】キャスタ輪による駆動負荷の低減に好適な無人搬送台車の進路変更装置および進路変更方法を提供する。
【解決手段】一対の駆動手段により夫々独立して駆動される左右の駆動輪10を備えた駆動ユニット4を車両の前後に配置した支軸6に旋回可能に配置し、駆動ユニット4の前記左右の駆動輪10の回転により車両を走行させると共に、その相対回転により駆動ユニット4が旋回することにより操舵される無人搬送車3を備え、無人搬送車3を交差する走行ラインの交差点上に停止させ、前記前後の駆動ユニット4を逆方向に進行させることにより車両を旋回させて、一方の走行ライン上から交差する他方の走行ライン上に前後の駆動ユニット4を夫々移行させる無人搬送台車1であり、前記無人搬送車3を交差点上での停止時に、その後の進路変更に伴う旋回方向へ回頭させて停止させるようにした。
(もっと読む)
車両
【課題】 簡単な構成で検出した物体に応じた適正な走行制御をすることができる車両を提供すること。
【解決手段】 カート路CRを走行するゴルフカート10に、前方に超音波を発信し、障害物に衝突したときに反射してくる超音波を受信することにより前方に障害物があることを検出するとともにその大きさを検出する対象物センサ31,32と、対象物センサ31,32による障害物の検出の有無および対象物センサ31,32が障害物を検出したときにはその大きさに応じてゴルフカート10の走行を制御するコントローラ25とを設けた。また、対象物センサ31,32から発信される超音波による検出範囲の幅をゴルフカート10の幅よりも少し大きくなる程度に規制するための規制部材31a,32aを対象物センサ31,32に設けた。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
搬送車両および搬送車両の自動走行制御方法
【課題】軌道修正を自動で行うことにより、作業員の労力の軽減ならびに軌道復旧完了までに要する時間を短縮する。
【解決手段】ガイドラインに沿って自動走行する搬送車両であって、車体の走行方向に沿って間隔をおいて配置されるとともに、ガイドラインに対する位置ズレ量を検出するための複数のセンサと、車体の走行方向に沿って設けられた第1車輪と、第1車輪に対して走行方向と平行に設けられた第2車輪と、センサの検出結果に基づきガイドラインに対する車体の位置ズレ量およびズレ角を推定し、推定した位置ズレ量およびズレ角に基づいて第1車輪および第2車輪の少なくとも一方を駆動制御する制御手段とを具備する搬送車両を提供する。
(もっと読む)
搬送車用の送信機
【課題】作業者の操作性を損なわせることなく、作業者の意思をより確実に反映させた状態で搬送車に対し走行の指示を行うこと。
【解決手段】有人運転モード及び無人運転モードの何れかで走行可能な牽引車に対し、無人運転モード時に遠隔操作によって走行を指示する送信機に、走行指示を行う際に操作する連続走行ボタン28a及び寸動走行ボタン28cと、これらのボタン操作を有効とするために操作する走行開始ボタン28dを設ける。そして、走行開始ボタン28dが操作されてから有効時間T1が経過する迄に連続走行ボタン28a又は寸動走行ボタン28cが操作されると、走行指示信号を送信する。また、有効時間T1の経過時迄に連続走行ボタン28a又は寸動走行ボタン28cが操作された場合、以降はこれらのボタン操作が終了してから有効時間T2が経過する迄に再びボタン操作されることにより走行指示信号を送信する。
(もっと読む)
搬送車の走行制御装置
【課題】無人運転モードにおいて乗車した作業者(運転者)による車両操作の介入を防止し、無人運転モードによる走行の信頼性を向上させること。
【解決手段】無人運転モード時において、運転者が検出される条件、パーキングブレーキが操作されたことが検出される条件、常用ブレーキが操作されたことが検出される条件、及びアクセルレバーが所定の操作態様で操作されたことが検出される条件のうち何れか一つの条件を満たした場合、走行中のときには停止させる車両停止制御を実行し、停止中のときには車両の発進を禁止する発進禁止制御を実行する(ステップS13〜S16)。
(もっと読む)
搬送車におけるリトラクタブル装置
【課題】タイヤの側方に配置されたアドレスセンサを備えていても、タイヤ交換を容易にできるとともに、シングルタイヤ仕様、ダブルタイヤ仕様の両方に対応することが可能になる搬送車のリトラクタブル装置を提供する。
【解決手段】リトラクタブル装置26は、前輪16の片側に配設される支持ブラケット27に対して平行四節リンク28が支持されている。平行四節リンク28は、上側リンク部材29の中間位置に連結されたワイヤ37を介して操作レバー38の操作により回動される。平行四節リンク28の前側に、搬送車の走行経路に設けられたガイド部材を検出可能なガイドセンサ25が支持されている。搬送車の停止すべき位置を示す表示部を検出可能なアドレスセンサ60は、前輪16に対して平行四節リンク28と反対側において後方に向かって延びる位置と、タイヤの交換に支障の無い位置とに回動可能に設けられている。
(もっと読む)
1 - 20 / 39
[ Back to top ]