
Fターム[5H301EE07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 非機械的ガイドであるもの (227) | 光を利用するもの (63)
Fターム[5H301EE07]の下位に属するFターム
Fターム[5H301EE07]に分類される特許
1 - 20 / 21
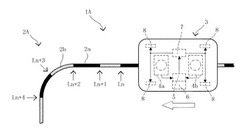
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2b間の境界線の数に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、境界線の数と走行速度との関係があらかじめ格納された記憶部6とを有することを特徴とする。
(もっと読む)
無人搬送システム

【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2bの色情報に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、を有することを特徴とする。
(もっと読む)
無人車両および無人搬送システム
【課題】撮像手段が2つだけであっても姿勢角を修正しながら全方向に走行可能な無人車両および該無人車両を備えた無人搬送システムを提供する。
【解決手段】無人車両10は、それぞれ領域A1、A2の画像データを出力する2つの撮像手段11a、11bと、画像データに基づいて姿勢角を算出する姿勢角算出部と、姿勢角がゼロになるように車輪15の操舵角を制御する操舵制御部とを備える。姿勢角算出部は、第1方向に走行する際は、2つの撮像手段11a、11bから出力される2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出し、第2方向に走行する際は、1つの撮像手段11aから出力される1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出するか、または2つの撮像手段11a、11bから出力される2つの画像データにおけるマーカの位置に基づいて姿勢角を算出する。
(もっと読む)
無人搬送システム
【課題】停止マークの汚れや欠けに強い無人搬送システムを提供する。
【解決手段】本発明に係る無人搬送システムは、路面に敷設された誘導ライン2と、誘導ライン2上に設けられた停止マーク3と、誘導ライン2に沿って走行するとともに、停止マーク3を目印にして停止する無人搬送車とを備えたシステムである。停止マーク3は、誘導ライン2とは異なった色で着色された部分(3b、3d)を有し、色の違いにより交差する2本の線X、Yを認識させ得るようになっている。また、無人搬送車は、該2本の線X、Yの交点を目印にして停止するよう構成されている。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
移動体の旋回角度・方位・位置を検出するシステムおよび方法
【課題】 移動体の旋回角度および方位を検出するシステムを提供する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
(もっと読む)
簡易無人搬送システム
【課題】安価で簡便に走行ラインが決定でき、同時にコマンド制御も安価で簡便にできる簡易無人搬送システムの提供。
【解決手段】 走行台車2が走行するラインを特定可能に、所定色によって帯状に設ける走行ライン3と、走行台車2に設置され、走行ライン3と対向し且つ走行方向と交差方向に複数のカラーセンサ24a〜24cを並設されて走行ライン3の色を検知可能な走行カラーセンサ24と、
走行台車2に設置され、カラーセンサ24a〜24cと電気的に接続されてカラーセンサ24a〜24cが常に走行ライン3上に位置するように走行台車2の走行を制御可能な制御部22と、
走行台車2の側部に設置されるコマンドカラーセンサ25と、
走行ライン3に沿って走行している走行台車2のコマンドカラーセンサ25と対向する走行面位置に所定色を施してなるコマンドライン4とからなる。
(もっと読む)
無人搬送車の走行制御方法
【課題】小さい半径の曲線部も安定して走行することが可能な無人搬送車を提供する。
【解決手段】走行台車と、走行台車を前後左右走行自在に走行路面上に支持するキャスタ輪と、走行台車の前後に設置されそれぞれ独立に操舵・駆動される駆動輪と、走行路面上のガイドテープを検出する走行台車の前後に設置されたガイドセンサとを有する無人搬送車の走行制御方法において、駆動輪が前輪・後輪速度制御され、後輪の操舵角の目標値が前輪の操舵角の目標値を超えた場合、前輪の速度を減速制御とするとともに後輪の速度を設定速度とし、前輪の操舵角の目標値が後輪の操舵角の目標値以上である場合、前輪の速度を設定速度とするとともに後輪の速度を減速制御することによって前記の課題を解決する。
(もっと読む)
無人搬送車
【課題】小さい半径の曲線部も安定して走行することが可能な無人搬送車を提供する。
【解決手段】円柱状ワークを搭載する走行台車と、走行台車を前後左右走行自在に走行路面上に支持するキャスタ輪と、走行台車に推進力を与える駆動輪と、走行台車の向きを変える操舵機構と、走行路面上のガイドテープを検出するガイドセンサと、駆動輪の操舵角度を検出する内界センサとを有する無人搬送車において、ガイドセンサの出力に基づき算出される操舵角度の目標値と内界センサの出力に基づき算出される操舵角度の現在値との差が設定値を超えた場合、駆動輪の減速制御を行う走行制御機構が搭載されていることによって前記の課題を解決する。
(もっと読む)
無人搬送車
【課題】ガイドテープの損傷を抑制し、ガイドセンサの数を削減し装置構成の簡略化・組立容易を実現し、走行上の安全性を向上させた無人搬送車を提供する。
【解決手段】円柱状ワークを搭載する走行台車と、走行台車を前後左右走行自在に走行路面上に支持する4つのキャスタ輪と、走行台車に推進力を与える2つの駆動輪と、走行路面上の前後進用ガイドテープ、横行用ガイドテープ及び停止マーカを検出する複数のガイドセンサとを有する無人搬送車において、ガイドセンサが、長手方向中心線上に前方側と後方側とに1つずつ配置された前後進ガイドセンサと、短手方向中心線上に1つ又は2つ配置された横行ガイドセンサとからなるとともに、各ガイドセンサが走行方向を検出する誘導センシング機能と停止位置を検出する停止センシング機能とを兼ね備えていることによって前記の課題を解決する。
(もっと読む)
自律走行車の走行システム
【課題】安定した信頼性の高い走行制御が確保できると共に、作業環境の清浄度が良好に維持できる自律走行車の走行システムを提供する。
【解決手段】自律走行車31の車体に取り付けられてテープ25a〜25eが付された天井部22を撮影する撮影部38と、床面21に埋め込まれた複数の磁気ピン30による磁気マーカライン26A、26B〜29A、29Bを検出する磁気センサ36、37とを備え、撮影部38によって撮影された画像データに基づいて床面21上を走行せしめると共に、磁気センサ36、37の磁気マーカライン26A、26B〜29A、29B検出に基づいて制動停止せしめる。塵埃等による作業環境の清浄度を悪化することなく、信頼性の高い走行制御が確保できる。また、磁気センサ36、37により高精度で磁気マーカライン26A、26B〜29A、29Bが検知でき高精度で制動停止ができる。
(もっと読む)
車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品
【課題】本発明は、経路に沿って移動する車両の位置を決定するための装置および方法に関連する。
【解決手段】この経路に沿ってマーカ、特にコードキャリアまたはバーコードが配置されている。この方法は、車両に搭載されたデジタルカメラによってマーカが検出され、デジタルカメラの検出範囲またはカバー範囲内にある少なくとも一つのマーカ像の位置の画像処理から、一つの所定のマーカまたは複数の所定のマーカに対する、経路に沿った車両の主移動方向および主移動方向に対して直角をなす少なくとも一つの方向における車両の相対位置が決定されることを特徴とする。本発明はまた、コンピュータプログラムおよびコンピュータプログラム製品に関する。
(もっと読む)
自律移動型ロボットの特定位置誘導制御方法
【課題】本発明は、自律移動型ロボットが滑らかな動作で任意の場所に、任意の方向から任意の向きで進入することができる自律移動型ロボットの特定位置誘導制御方法を提供することを目的とする。
【解決手段】自律移動型ロボットの特定位置誘導制御方法であって、自律移動型ロボットを移動させる移動ステップと、自律移動型ロボットの周囲の状況を撮影する撮像ステップと、特定位置の上方に設けられたマーカを抽出するマーカ抽出ステップと、撮像ステップにて撮影された撮像画像をもとに前記特定位置の方向を算出する方向算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の間の距離を算出する距離算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の該ロボット進入する姿勢方向を算出する姿勢方向算出ステップと、を有しており、自律移動型ロボットを前記特定位置の特定の方向から進入させることを特徴とする。
(もっと読む)
無人搬送車の検品搬出方法
【課題】搬送中に搬送物の種類や数量を検品し、その結果に基づき搬送先を自由に変更して搬送システムをシンプルに維持し高い搬送効率を維持することができる無人搬送車の検品搬送方法を提供する。
【解決手段】検品ステーション11を通過する無人搬送車2の情報およびその通過時点を管制制御コンピュータ4aから検品用コンピュータ18に伝達し、この伝達信号を受けて、検品ステーション11を通過する当該無人搬送車2上の各搬送物に取り付けたタグ12のみを管制制御装置4で用いる無線通信方式とは異なる無線通信方式を用いて無線により非接触で検出し、検品用コンピュータ18が管制制御コンピュータ4aを介して当該無人搬送車2に検品結果を発信し、その検出データに基づいて搬送物の数量および種類に異常がないかどうかを判断し、異常がある場合には搬送経路を変更して保守ステーション23に荷置きする。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
無人搬送車用の誘導装置
【課題】 鉄板製の路面、あるいは凹凸のある路面に設けられたコースであっても無人搬送車を良好に誘導できるようにすることを目的とする。
【解決手段】 本発明に係る無人搬送車用の誘導装置は、無人搬送車Cを所定のコースRに沿って走行させるための誘導装置10であって、無人搬送車Cに取付けられており、その無人搬送車Cの車幅方向に並んで配置された多数の受光センサからなる受光器と、無人搬送車CがコースRに沿って走行している状態で、受光器の車幅方向中央に位置する中央受光センサに光が照射されるように構成されている光源20と、無人搬送車CがコースRから外れる過程で、受光器の中央受光センサ以外の受光センサに光が照射されると、中央受光センサに光が照射される方向に無人搬送車Cを導く制御装置とを有する。
(もっと読む)
自走式作業ロボット
【課題】 簡単な教示作業で、走行方向による走行距離誤差の補正を行い、作業領域内を、正確に隈なく作業することのできる自走式作業ロボットを提供する。
【解決手段】 駆動輪を回転させて本体1の移動と方向操舵を制御する走行制御手段と、本体1の走行方向および左右方向にある障害物Hの有無を検出する障害物センサと、本体の走行方向を検知する方位センサと、前記本体に設けられ床面に所定の作業を行う作業手段と、実際に走行した往路X1,Y1の第1距離を測定する第1直進距離計測手段と、実際に走行した復路X2,Y2の第2距離を測定する第2直進距離計測手段とを備え、前記測定した往路の第1距離と前記測定した復路の第2距離との関係に基づいて、現在または次回以後の実走行距離を制御することを特徴とする。
(もっと読む)
搬送システム
【課題】 小型化を図ることができる上、低価格で得られる搬送システムを提供すること。
【解決手段】 移送装置1,2によるワークWの移送と台車3によるワークWの搬送とを組み合わせて行い、前記台車3が、所定の経路を走行すると共にワーク受け渡し位置P,Qで停止し、ワーク受け渡し位置P,Qに停止した台車3と前記移送装置1,2との間でワークWが受け渡しされる搬送システムであって、台車3に搭載されこの台車3を制御する台車側コントローラ6と、移送装置1,2を制御する装置側コントローラ5とを備え、前記二つのコントローラ5,6間における情報データの授受を、点滅光の投受光によって行うように構成されている。
(もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、区間毎に設定した車輪径および車輪間隔等の車輪特徴量が記憶されている。位置算出部55は、現在走行している区間に対して設定された車輪特徴量と、計測された車輪の回転量とに基づき、現在位置を算出する。経路が左右に傾斜している場合に、谷側の車輪径を小さく設定しておけば、特別な処理を行わずに現在位置を正確に求められる。車輪情報算出部57は、区間の始点終点間で計測された車輪回転量と、同区間の距離および区間両端の角度差といった経路情報とに基づき、車輪特徴量を算出して、この車輪特徴量が位置算出部55で使用される。
(もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、所定区間の始点終点間の距離及び角度差を記録した経路情報が記憶されている。そして、所定区間の終点が判別されると、車輪情報算出部57が、所定区間の始点終点間で計測された車輪回転量と、記憶部15の経路情報とに基づき、車輪径や車輪間隔等の車輪特徴量を算出して記憶部15に記憶する。位置算出部55は、計算された車輪特徴量と計測された車輪の回転量とに基づき現在位置を算出する。
(もっと読む)
1 - 20 / 21
[ Back to top ]