
Fターム[5H301EE08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 非機械的ガイドであるもの (227) | 光を利用するもの (63) | 光を反射するもの (35)
Fターム[5H301EE08]に分類される特許
1 - 20 / 35
無人車両
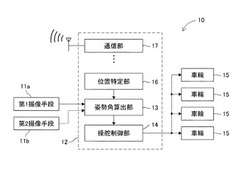
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
自動走行車および自動走行システム

【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】誘導ライン2Dと、無人搬送車とを備えた無人搬送システムであって、誘導ライン2Dは、異なる3つの色が順繰りに現れるように着色された3種類の着色領域2a、2b、2cを有し、無人搬送車は、撮像手段と、着色領域2a、2b、2cの色に基づいて目標速度を設定する目標速度設定部と、走行制御部と、3種類の着色領域2a、2b、2cの色の順番に基づいて走行方向を特定する走行方向特定部と、着色領域2a、2b、2cの色と走行速度との関係および3種類の着色領域2a、2b、2cの色の順番と走行方向との関係があらかじめ格納されており、かつ着色領域の色の履歴が格納される記憶部と、を有することを特徴とする。
(もっと読む)
無人搬送システム
【課題】施工に手間がかかるとともに汚れや損傷に弱い分岐指示用部材を不要とし、無人搬送車を誘導ラインに沿って目的地まで確実に走行制御可能な、無人搬送システムを提供する。
【解決手段】無人搬送システム1は、分岐部G〜Jを有し複数の走行路を形成する複数の誘導ラインLと、誘導ラインに沿って走行する無人搬送車2と、誘導ラインを含む画像を撮像する撮像装置3と、この画像に関する画像情報に基づいて誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御する走行制御装置4と、を備える。各誘導ラインは互いに異なる色の識別パターンからなる。走行制御装置は、現在地および目的地を結ぶ誘導ラインを設定し、画像の誘導ラインの識別パターンと設定した誘導ラインの識別パターンとを照合しながら、設定した識別パターンの誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御するように、構成されている。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置は、路面に敷設された誘導ラインに沿って走行する無人搬送車に備えられた誘導ライン撮像装置であって、誘導ラインを含む領域を撮像面で光学的に撮像して該領域の画像データを生成する撮像手段と、撮像する領域を照射面から照射した光によって照らす1つ以上の照明手段と、撮像面上に設けられた第1偏光フィルタ6と、照射面上に設けられた第2偏光フィルタ7とを備え、第1偏光フィルタ6を透過し得る光L5の振動方向および第2偏光フィルタ7を透過し得る光L2(L3)の振動方向が異なることを特徴とする。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2と、該誘導ライン2に沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1であって、誘導ライン2は、区間によって異なるライン幅を有し、無人搬送車3は、誘導ライン2を含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおけるライン幅に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部6と、を有することを特徴とする。
(もっと読む)
無人搬送システムおよび無人搬送車
【課題】パレットの脚部の設置状況によることなく、無人搬送車をパレットの脚部間において正確に誘導できる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】進入口Eからパレット100の下方(左右の脚部102の間)へ進入した無人搬送車1は、第1および第2レーザセンサ79a,79bを用いて、パレット100の台部101の下面に設けられている誘導体103までの距離を測定して、その測定値とレーザ測定メモリ72aに記憶される目標値(第1および第2レーザセンサ79a,79bのそれぞれから車体2の前後方向に延びる中心線までの距離)とが一致するように走行方向の制御を行う。ここで、誘導体103は、脚部102の設置状況とは無関係に、台部101の前後方向に延びる中心線に沿って連続して設けられているので、脚部102の設置状況によることなく、無人搬送車1を、パレット100の略中央部において走行させることができる。
(もっと読む)
走行車
【課題】走行車のレーザ投受光器を昇降させる昇降機構において、内筒部材と外筒部材との一体剛性を確実に確保できるようにする。
【解決手段】
レーザ誘導方式の走行車1は、走行車本体10と、支持部材20と、レーザ投受光器50とを、備えている。支持部材20は、走行車本体10に取り付けられる。支持部材20は、外筒部材21と内筒部材31とを有している。外筒部材21は、走行車本体10に固定されている。内筒部材31は、外筒部材21に対して昇降する。内筒部材31は、レーザ投受光器50を支持する第1筒状部132aと、第1筒状部132aの下方で第1筒状部132aより大径に形成された第2筒状部132bと、第2筒状部132bの下方でテーパ状に形成された第3筒状部132cとを、有している。外筒部材21の上端部と内筒部材31の下端部とは、互いにテーパ部25a,32aにおいて嵌合される。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置1Aは、路面10に敷設された誘導ライン11に沿って走行する無人搬送車に備えられており、誘導ライン11を含む撮像領域Aを撮像面3で撮像して画像データを生成する撮像手段2と、撮像領域Aを照射面5から照射した光によって照らす照明手段4とを備え、照明手段4の照射面5が、撮像領域Aの外縁と撮像手段2とを結ぶ線L1を路面10において等角に反射させた線L2で区分けされた外側の領域に配置され、撮像手段2の撮像面3が、照明手段4によって直接的に照らされることのない位置に配置されている。
(もっと読む)
移動体システム
【課題】距離センサを用いて移動体を精度良く自律走行させるとともにより省スペース化できるようにした、移動体システムを提供する。
【解決手段】移動体1に取り付けられ、所定の探索範囲に検出用光を走査して移動体と探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置7と、平板標識20の設置される位置を含む走行経路の地図情報を記憶する地図情報記憶手段と、距離方向検出装置の検出結果と地図情報記憶手段に記憶された地図情報とを照合して移動体の進行方向を決定する進行方向決定手段と、を有する移動体システムであって平板標識20に検出用光を拡散反射させる拡散反射面と検出用光を鏡面反射させる鏡面加工面とを設けて構成する。
(もっと読む)
走行制御システム
【課題】移動体の制御を安価にすることができ目標位置まで自動で移動することを目的とする。
【解決手段】移動体100に備えられ信号光を投光及び検知可能な投光機20と、投光機20が投光する信号光と同じ方向へ超音波を送信すると共に送信した超音波を検知する2つの超音波センサ30と、移動体100の目標位置200に備えられ投光機20の投光する信号光を反射する反射板50から構成する走行制御システム10であって、移動体100は、投光機20で移動体100の進行方向を検知した後、2つの超音波センサ30で移動体100の目標位置200に対する移動体100の傾きを補正しながら目標位置200まで移動することを特徴とする走行制御システム10。
(もっと読む)
走行車
【課題】経路上に障害物が存在し、かつ、即座に当該障害物が除去されない状況が生じた場合であっても、荷物の搬送等の作業を効率よく行うことのできる走行車を提供すること。
【解決手段】障害物センサ110と、障害物センサ110による検知結果に応じて、走行100車に障害物を回避するための第一の回避動作を行わせるコントローラ120と、障害物の位置を示す位置情報と、第一の回避動作における走行車の左右方向の回避幅を示す回避幅情報とを記憶する記憶部130とを備え、コントローラ120は、(a)障害物センサ110が、位置情報に示される位置における障害物の存在を、走行車100と障害物との距離が第一の距離以下である時点において検知した場合、(b)走行車100と障害物との距離が第二の距離に至る前に、走行車100に、記憶部130に記憶されている回避幅情報を用いた第二の回避動作を開始させる走行車100。
(もっと読む)
方向傾き検出装置、および搬送システム
【課題】床面に貼付したテープを検出して進行方向を制御する従来の自動搬送車では、テープを検出できなくなる場合があった。
【解決手段】異なる高さに配置された第1の光センサ30、第2の光センサ31、32、第3の光センサ33を含み、搬送車の側面に取付けられる光センサユニット12を有する光センサ部と、第1の光センサの光が照射される、等間隔で配置された複数の直線状の第1の溝21と、第2の光センサの光が照射される、少なくともいずれかの第1の溝を延伸した位置に配置された直線状の第2の溝22、23と、第3の光センサの光が照射される反射面24とを有し、搬送路に沿って所定の間隔をおいて複数個配置される立体マーカ20とを備える。第2の溝は搬送路における前記立体マーカの位置を表しており、光センサ部は、搬送路における搬送車の位置を検出する位置検出部と、反射面に対する搬送車の傾きを検出する傾き検出部とを有する。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
自律移動装置とこれを用いた搬送方法
【課題】複数の積載体(例えば台車)が、互いの隙間を詰めて置かれたり、乱雑に配置されていたりする場合であっても、高度な制御を必要とすることなく、積載体を保持(例えば連結)でき、かつ、所望の搬送先へ自律移動できる自律移動装置を提供する。
【解決手段】搬送物が積載される積載体1を保持した状態で自律移動することで該積載体を搬送する自律移動装置10。積載体1と分離した状態から該積載体を保持可能な保持機構3と、所望の搬送先へ保持機構3を移動させる移動機構5と、受動モードと自律モードとの間で切換可能な制御部7と、を備える。制御部7は、受動モードにある時に、外部からの動作指令に従って保持機構3と移動機構5を動作させ、自律モードにある時に、移動機構5を自律制御して所望の搬送先へ保持機構3を移動させる。
(もっと読む)
移動体及び移動体の制御方法並びに移動体システム
【課題】教示作業にかかる労力を低減するとともに移動体を走行経路に沿って精度良く走行させることができるようにした、移動体及び移動体の制御方法並びに移動体システムを提供する。
【解決手段】予め走行経路に沿って配設されたガイドライン104を検出するガイドラインセンサ4と、車体2の進行方向を撮像するカメラ4と、車体2の駆動装置3と、駆動装置3を制御する制御装置5とを有し、制御装置5を、ガイドラインセンサ104に基づいて駆動装置3を制御する教示走行を実行する教示走行制御部7と、教示走行実行時に、複数の教示地点のそれぞれにおいてカメラ4を動作させて教示画像を取得する教示画像取得部6と、教示画像を記憶する画像記憶部9と、
教示画像と取得画像との比較結果に基づいて駆動装置を制御する再生走行制御部8とを有して構成する。
(もっと読む)
自動搬送車及びその自動搬送車を使用する自動搬送車運行システム
【課題】様々な作業記号を明示した搬送指示ラインに沿って自動走行する自動搬送車及びその自動搬送車を使用する自動搬送システムを提供する。
【解決手段】部品等を運搬する台を載置可能なフレーム1と、フレーム1の下面に走行面を撮影可能に取り付けられる撮影機2と、撮影機2からの画像信号を受信して画像処理を行う画像処理ユニット3と、画像処理ユニット3から画像処理信号を受信し駆動車輪5を駆動させる駆動モータ6と駆動車輪5の走行方向を回転させるステアリング7とへ制御信号を送る制御ユニット4とを有する。
(もっと読む)
無人搬送車
【課題】誘導ラインからのずれを抑制して、安定した直進走行を行うことができること。
【解決手段】無人搬送車は、駆動ユニット16により独立して駆動される駆動輪13,14を備えている。そして、駆動ユニット16のボス部25には、フランジピン26が収容され、フランジピン26は、無人搬送車の機台から駆動ユニット16に向かって突出する嵌合ピン27とスプライン嵌合している。さらに、フランジピン26及び嵌合ピン27の内部には、圧縮コイルバネ32が設けられている。そして、ボス部25の底面25aには第1円錐溝33が設けられるとともに、フランジピン26の下端面26bには第2円錐溝35が形成されている。第1円錐溝33と第2円錐溝35との間には、鋼球34が設けられ、鋼球34は回転自在な状態で第1円錐溝33と係合している。無人搬送車が直進走行している状態において、鋼球34は、第2円錐溝35の中心に位置している。
(もっと読む)
移動体の誘導システム及び誘導方法
【課題】坑道内において比較的に簡易な設備により移動体をより精度良く誘導することを可能にする移動体の誘導システム及び誘導方法を提供する。
【解決手段】レーザスキャナ13と、坑道T内の長手方向に沿った3次元マップを記憶する記憶部15aと、内界センサ14で検出された移動距離を用いて長手方向の位置を推定する位置推定部15bと、光反射部材Tsとの相対位置で長手方向の位置を推定する位置推定部15cと、位置推定部15cで推定された長手方向の位置を優先的に選択する選択部15dと、位置推定部15bの起算位置を補正する補正部15eと、観測形状データと3次元マップの形状データと選択部15dで選択された推定位置とから搬送車両3Aの位置姿勢情報を割り出す演算部15fと、位置姿勢情報に基づいて搬送車両3Aを絶対誘導する絶対誘導制御部15gとを備える。
(もっと読む)
自動運転車および自動運転車運行システム
【課題】 運行アルゴリズムが簡易で使いやすい。経路設定,変更が容易でシステム設定,維持及び管理が容易。運行エラー防止。交差点競合防止。
【解決手段】 自走機構22〜27を備える車体2;路面上案内線条1を撮影する装置4;撮影画面の線条像の位置および姿勢を検出する手段9;該位置および姿勢に対応して、案内線条に沿って走行するように自走機構を操作する運転手段9,29;案内線条に付加したコード標識の画面上の像を認識して識別コードを検出する標識検出手段9;および、運行経路上の通行点及び分岐点を識別コードで表しそこでの運行指示(アクション)を該識別コードに付した地点情報(セル内データ)の群でなる運行予定表(Excelのbook)を保持し、標識検出手段が検出した識別コードを運行予定表の識別コードと照合して、該識別コードに付された運行指示に従い、運転手段を制御する運転制御手段9;を備える。
(もっと読む)
1 - 20 / 35
[ Back to top ]