
Fターム[5H301EE13]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 誘導経路の構造、配置、作成手段 (641) | 経路に沿って配置された手段によるもの (623) | 経路の一部に形成されるもの (26)
Fターム[5H301EE13]に分類される特許
1 - 20 / 26
スポット誘導走行車
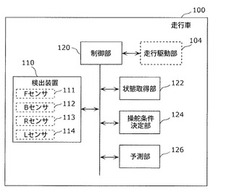
【課題】カーブ部分を的確に通過することのできるスポット誘導走行車を提供すること。
【解決手段】複数のマークのそれぞれを検出することのできる検出装置110と、検出結果を用いて求められる、第一マークの位置におけるスポット誘導走行車の状態を示す第一状態情報を取得する状態取得部122と、第一状態情報と目標状態情報とに基づいて、第一操舵条件を決定する操舵条件決定部124と、第一操舵条件に従って、スポット誘導走行車100の走行を制御する制御部120と、第二マークの位置におけるスポット誘導走行車100の状態を示す予測情報を算出する予測部126とを備え、状態取得部122は、予測情報と実測情報との差分を示す第二状態情報を取得し、操舵条件決定部124は、第二状態情報に示される差分に応じて第二操舵条件を決定し、制御部は、第一操舵条件に代えて第二操舵条件に従って、スポット誘導走行車100の走行を制御する。
(もっと読む)
有軌道台車システム

【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自動搬送システム
【課題】導線によらない自律走行区間を含む自動搬送システムにおいて、シンプルなシステム構成によりコストを抑えたシステムを提供すること。
【解決手段】自動搬送システム1は、自動搬送車2が追従可能なガイドライン11、12が経路に沿って敷設された第1及び第2の追従区間と、第1の追従区間と第2の追従区間との間に配置され、自動搬送車2が自律走行する自律走行区間と、自律走行区間の自動搬送車2を第2の追従区間のガイドライン12に復帰させるための復帰パターン100が敷設された復帰走行区間と、を含み、自動搬送車2は、復帰パターン100の外縁101が検出されたときに追従走行制御に切り換えられる。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
無人搬送車
【課題】加熱炉外の出発点から加熱炉内の目標点まで正確に走行できると共に、加熱炉外のスペースを有効利用できるようにした無人搬送車を提供する。
【解決手段】荷役ステーションから加熱炉Yに向かって走行する無人搬送車1を、加熱炉Yの外部において第1および第2ガイドセンサ78a,78bと第1マークセンサ79aとを使用して走行させ、加熱炉Yの内部において第1〜第3レーザセンサ80a,80b,80cとを使用して走行させることで、加熱炉Yの内部に設定された停止位置(目標点)に停止させることができる。
(もっと読む)
移動体の誘導制御システム及び誘導制御方法
【課題】 磁気マーク等のランドマークを床面に分散配置しても、自律移動体に走行軌道の再現性をたかめ、誘導制御システムの低コスト化と柔軟性の向上を実現する。
【解決手段】床面等に設置されたマーカーと、該マーカーを検出して予め定められた走行軌道に沿って自律移動体を自律走行させる際、移動体の走行軌道に基づいて床面等にマーカーを分散して離隔配置する。軌道習得走行により、このマーカーに沿わせながら、再現すべき軌道に沿って移動体を走行させ、移動体の走行面における2次元座標及び走行方向を走行軌道と、マーカー検出部の検出履歴を記録する。記録された走行軌道とマーカー検出履歴に基づいて、マーカーのマップと走行軌道を生成し、移動体を走行させる際、走行軌道とマーカー検出履歴に基づいて、マーカーのマップを更新する。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
障害物検知装置、自律移動体、障害物検知方法
【課題】細い棒や細い柱、人間の脚といった細物を確実に検知可能な技術を提供する。
【解決手段】障害物検知装置は、画像データを記憶するメモリA10と、前記画像データに基づいて画像を投影するプロジェクタ4と、映し出された画像を撮影して画像データを生成するカメラ5と、生成された前記画像データを記憶するメモリB12と、メモリA10に記憶されている前記画像データと、メモリB12に記憶されている前記画像データと、を比較する比較部13と、を備える。自律移動型ロボット100は、ロボット本体3と、ロボット本体3を移動させるための駆動回路16と、駆動回路16を制御する制御部9と、上記の障害物検知装置と、を備える。
(もっと読む)
方向傾き検出装置、および搬送システム
【課題】床面に貼付したテープを検出して進行方向を制御する従来の自動搬送車では、テープを検出できなくなる場合があった。
【解決手段】異なる高さに配置された第1の光センサ30、第2の光センサ31、32、第3の光センサ33を含み、搬送車の側面に取付けられる光センサユニット12を有する光センサ部と、第1の光センサの光が照射される、等間隔で配置された複数の直線状の第1の溝21と、第2の光センサの光が照射される、少なくともいずれかの第1の溝を延伸した位置に配置された直線状の第2の溝22、23と、第3の光センサの光が照射される反射面24とを有し、搬送路に沿って所定の間隔をおいて複数個配置される立体マーカ20とを備える。第2の溝は搬送路における前記立体マーカの位置を表しており、光センサ部は、搬送路における搬送車の位置を検出する位置検出部と、反射面に対する搬送車の傾きを検出する傾き検出部とを有する。
(もっと読む)
無人搬送車
【課題】ガイドテープの損傷を抑制し、ガイドセンサの数を削減し装置構成の簡略化・組立容易を実現し、走行上の安全性を向上させた無人搬送車を提供する。
【解決手段】円柱状ワークを搭載する走行台車と、走行台車を前後左右走行自在に走行路面上に支持する4つのキャスタ輪と、走行台車に推進力を与える2つの駆動輪と、走行路面上の前後進用ガイドテープ、横行用ガイドテープ及び停止マーカを検出する複数のガイドセンサとを有する無人搬送車において、ガイドセンサが、長手方向中心線上に前方側と後方側とに1つずつ配置された前後進ガイドセンサと、短手方向中心線上に1つ又は2つ配置された横行ガイドセンサとからなるとともに、各ガイドセンサが走行方向を検出する誘導センシング機能と停止位置を検出する停止センシング機能とを兼ね備えていることによって前記の課題を解決する。
(もっと読む)
自律走行車の走行システム
【課題】設置費用の低減及び設置作業の簡素化ができる自律走行車の走行システムを提供する。
【解決手段】第1磁石21を保持する第1ホルダと第2磁石22を保持する第2ホルダが一体形成された走行経路杭1を走行経路基準線Waと直交する状態で間隔を有して連続的に地中に埋設する。自律走行車に設けた一対の第1磁気センサ45及び第2磁気センサ46により第1磁石21及び第2磁石22の磁気検知を行い、その結果に基づいて操舵制御手段で操舵し、走行経路基準線Waに沿って走行する。そのため、埋設される走行経路杭1の間隔が比較的大きく離間して配置しても自律走行車の走行が抑制される。これにより埋設される走行経路杭1を削減でき、走行経路杭の設置費用の低減及び設置作業の簡素化が可能になる。
(もっと読む)
自動搬送システム
【課題】各自動搬送車の残り稼動時間を正確に把握することにより、荷役作業を効率的に行うことができる自動搬送システムを提供する。
【解決手段】本発明に係る自動搬送システム100は、管理機10からの指令に基づいて複数の自動搬送車AGV1〜3が所定の搬送経路に沿って走行しながら荷役作業を行うものであって、自動搬送車AGV1〜3はそれぞれ充電可能な電源としてのキャパシタを備え、自動搬送車AGV1〜3のそれぞれから管理機10に対して、キャパシタの出力電圧または当該出力電圧から算出されるキャパシタの残容量に関する情報と、当該自動搬送車の位置に関する情報とが送信され、管理機10が受信した情報に基づいて荷役作業を行うのに適当な一の自動搬送車(例えば、AGV2)が決定され、管理機からその自動搬送車AGV2に対して荷役作業を行う旨の指令が送信される。
(もっと読む)
移動体システム
【構成】 複数のコイルからなるアレイを検出ヘッドに設け、アレイ長と等しいピッチで走行経路に磁気マークを設ける。磁気マークとコイルとの相互作用から、磁気マークを基準とする移動体の位置を求める。
【効果】 磁気マークを連続的に配置しなくても、移動体の位置を求めることができる。
(もっと読む)
移動体教示システム
【課題】 移動体を動かす事なく目標位置情報の教示が可能であり、また教示者が教示と同時に目標位置情報の確認および編集を容易に行う。
【解決手段】 教示装置は、ランドマークを計測するランドマーク計測部と、ランドマークの計測結果から環境内での教示装置位置を算出する位置算出部と、教示装置位置を教示者に提示する位置提示部と、教示装置位置を移動体の目標位置として編集する位置編集部と、位置編集部で編集された目標位置を記憶する位置記憶部と、位置記憶部に記憶された目標位置を移動体に送信する位置送信部とを備え、移動体は、位置送信部から送られた目標位置を受信する位置受信部と、位置送信部から送られた目標位置を受信する位置受信部と、位置受信部にて受信した目標位置に従って移動を実行する移動実行部とを備える。
(もっと読む)
飼料移動のための無人走行車両
地面に置かれた飼料(3)を水平に移動させるための無人走行車輌(1)は、別々の駆動手段により別々に駆動される二つの車輪と、その車輌から壁部への距離を測定する距離測定手段(6)と、その壁部に対する車輌の中心線の向きを測定する向き測定手段(9)と、車輪間のトルク差を測定するトルク差測定手段(10)と、その車輌を走行方向に移動するよう制御する制御装置(11)と飼料(3)を水平に移動させる飼料移動手段と、を備え、前記制御装置(11)が、動作中に前記距離測定手段(6)により測定された壁部までの距離を、初期設定の最小距離以上に維持するようプログラムされ、さらに、飼料移動手段の最下点(19)の高さと又は位置を調整する調整装置を備えている。 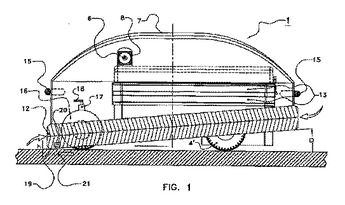 (もっと読む)
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
移動体システム
【構成】 移動体A,Bの移動経路に沿ってリニアセンサL1〜L4,R1〜R4を2列に間隔を置いて配置し、移動体A,Bに設けた磁石のリニアセンサに対する相対位置を求める。求めた相対位置にリニアセンサの原点座標を加算し、移動体の絶対位置を求める。
【効果】 移動体の絶対位置を地上側で迅速かつ高精度に検出できる。
(もっと読む)
搬送車及び搬送車システム
【構成】 目標走行路からの逸脱を検出すると、前輪ユニットの誤差を解消するように
【効果】 無人搬送車の車体の振れを小さくし、干渉範囲を狭くできる。
(もっと読む)
1 - 20 / 26
[ Back to top ]