
Fターム[5H301GG09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408) | 光学式検出手段であるもの (1,003) | 撮像手段であるもの (462)
Fターム[5H301GG09]に分類される特許
201 - 220 / 462
移動体制御システムおよび移動体制御方法
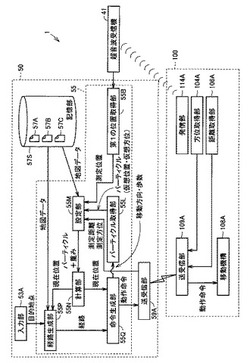
【課題】移動体の現在位置を精度良く取得することができる移動体制御システムを提供する。
【解決手段】移動体制御システム1は、移動体100の測定向きを取得する方位取得手段104Aと、音波および電波の少なくともいずれかを発信する発信手段114Aと、移動体周辺の障害物までの測定距離を取得する距離取得手段106Aと、障害物の位置を示す地図データ57Aを格納する記憶手段57Sと、音波および電波の少なくともいずれかに基づいて、移動体100の測定位置を計算する第1の位置取得手段55Bと、測定位置と測定向きと測定距離と地図データとに基づいて、移動体の現在位置を計算する第2の位置取得手段とを備える。
(もっと読む)
救援ロボットシステム、救援方法及び救援ロボット

【課題】
自律移動ロボットが自己位置の推定に失敗した場合、管理者による操作・介入によるリカバリでは管理者の場所への移動、救援リカバリのタイミングに問題がある。また、リカバリを高性能制御装置、ロボットのCPUの処理量及びメモリ使用量を少なくして救援リカバリを行う必要がある。
【解決手段】
管理サーバが自律移動ロボットのロボット情報を保持し、定期的に自律移動ロボットから位置情報を取得し、自律移動ロボットから救援の通知を受けた場合に配下のロボットに救援を指示し、救援指示を受けた救援ロボットは該当ロボットの探索を行い、被救援ロボットとの相対位置より被救援ロボットの絶対位置と方位を算出して被救援ロボットのリカバリを行う。
(もっと読む)
監視方法
【課題】警戒監視によって識別した追尾対象を移動ロボットで継続して追尾することが可能な監視方法を提供する。
【解決手段】
移動ロボット10に搭載するカメラとして、光学的ズーム機能を有する監視用カメラ11と操縦用カメラ12を用い、監視用カメラ11を広範囲視野の警邏状態にしてラスタースキャンしながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させる警邏行動と、警邏行動中において、監視用カメラ11からの広範囲視野映像内に識別対象物A,Bを発見した際に監視用カメラ11を狭範囲視野の監視状態にして識別対象物A,Bをクローズアップする識別行動と、識別行動において、識別対象物A,Bが追尾対象であると識別した際に監視用カメラ11を狭範囲視野の監視状態に保ちながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させて追尾対象を追尾する追尾行動を行う監視方法。
(もっと読む)
点検システム、制御装置、点検方法及び制御プログラム
【課題】移動体によって建造物の閉空間内を点検する場合に、算出される移動体の現在位置をユーザによって補正可能とする点検システム、制御装置、点検方法及び制御プログラムを提供する。
【解決手段】床下点検システム10では、通過ポイント選択部153は、床下点検ロボット200が通気口Dを通過することが検出された場合、当該通気口Dに対する換気口Vの相対位置に基づいて、当該通気口Dを複数の通気口D1〜D4の中から選択する。表示部170は、床下平面図上に、現在位置を示す図形Pと推定位置を示す図形Qとを表示する。受付け部160は、床下平面図上において、図形Pを図形Qに補正する操作をユーザから受付ける。
(もっと読む)
自律移動装置及び自律移動装置の制御方法
【課題】自律移動装置において、装置構成を複雑化、大型化することなく、壁などによる未計測領域(死角)が存在し不用意に未知の移動障害物が飛び出し得る領域を移動する場合において、信号や標識、横断歩道などの設置の有無に拘わらず、出会い頭の衝突を自律的に回避することができるようにする。
【解決手段】無人車1に搭載され周囲の固定障害物及び移動障害物の有無を計測するセンサ3と、センサ3による計測結果に基づいて固定障害物102のない移動可能領域103を検出して移動可能領域103内において無人車1を移動させるとともに移動障害物101を検出し移動障害物101との衝突を回避させる制御手段2とを備え、障害物101,102による未計測領域104と移動可能領域103とが接する境界105を検出し、この境界105と移動予定路106との間の距離が所定の距離未満である場合には、境界105と移動予定路106との間の距離が所定の距離以上となるまで、無人車1を減速、または、停止させる。
(もっと読む)
自己位置認識方法及び自己位置認識装置
【課題】ランドマーク、磁気マーカ等の設置を行なわなくても、自己位置を認識できる方法及び装置を提供する。
【解決手段】移動体が自己の位置を認識する方法であって、移動体が移動する環境において基準磁気を測定し、基準磁気と基準磁気が測定された位置とが対応付けられた磁気−位置情報を予め記憶するステップ(a)と、前記環境において移動体が備える磁気センサにより直流の実測磁気を測定するステップ(b)と、ステップ(a)で記憶された基準磁気と、ステップ(b)により測定された実測磁気と、を対比して実測磁気が測定された位置を特定するステップ(c)と、を備える。
(もっと読む)
走行制御装置及び走行制御方法及びプログラム
【課題】月面車10の日陰部への進入を回避する事により、電力を確保し、低温保護を自律的に行う。
【解決手段】月面車は、サーモカメラ12で月面上の温度分布画像等を撮像する。平坦な地形に対して凹地形部には日陰部ができ、平坦な地形や凸地形部の太陽光照射側は日照となる。その際、月面では、日照部分は高温となり、日陰部分は低温となる。と走行制御装置100の近接度判断部24は、日陰部分との近接度を判断し、走行制御部28が、低温部分を避けて高温部分を走行するように駆動部の舵確認しながら遠隔操作制御する。即ち、駆動部と低温部部の境界の距離が一定範囲内になった場合には高温部分側に転舵させる。走行制御装置100の走行制御部28は、進行方向に低温部分がある場合、または、転舵しても駆動部と低温部分の境界の距離が一定範囲以内になる場合には、駆動部を停止させる。
(もっと読む)
移動ロボット及び足跡計画方法
【課題】信頼性の高い足跡計画を短時間で実行することができると共に、自然な動作で移動可能な移動ロボット及び足跡計画方法を提供する。
【解決手段】本発明に係る移動ロボット100は、脚部の下端に足平を設け、計画した着地位置に足平を着地させて移動する移動ロボットであって、移動始点Sから移動終点Gへと至る移動ロボット100の移動経路Rを計画する経路計画部13と、計画した移動経路R上において移動始点Sから所定の距離にサブゴールSGを設定するサブゴール設定部14と、移動始点Sから設定したサブゴールSGに到達する足平の着地位置を計画する足跡計画部15と、を備える。
(もっと読む)
自律移動ロボットおよびそのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
走行ロボット
【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
センサーユニットを備え自立走行可能な床用集塵装置及び対象
【課題】この種の装置及び対象を光学的な三角計測システムを用いて障害物からの距離計測に関して遠方領域でも正確な距離計測ができるように、改良すること。
【解決手段】本発明は、電動モータ駆動の走行ローラ(3)、装置筺体、集塵コンテナ、及び装置カバー(6)を備えた自立走行可能な床用集塵装置(1)であって、床用集塵装置(1)が障害物検出ユニットを有し、障害物検出ユニットが光源(10、10’)と、反射光用の受光レンズ(12)状の光学素子及び光検出素子(11)を有する受光ユニット(E)とを有する三角計測システム(T)である床用集塵装置に関する。課題を解決するために、光ビームが受光ユニット(E)内で、受光レンズ(12)によって集光(コリメート)された後に、障害物(13、13’)までの実際の距離の大きさに応じて、光検出素子(11)上に入射する光ビームの変位が大きくなるように、割り振られるように制御される。
(もっと読む)
倒立走行ロボット及びその制御方法
【課題】障害物の近傍で着地状態から倒立状態へ移行する際に、障害物への接触・衝突を回避することができる倒立走行ロボットを提供すること。
【解決手段】本発明の一態様に係る倒立走行ロボットは、駆動軸C1、C2回りに回転する車輪31、32と接地部材33とが床面に接した着地状態から、車輪31、32が床面に接し接地部材33が床面から離れる倒立状態とする際に、倒立走行ロボット1の周囲の障害物から可動台11を遠ざける方向に移動させるように可動台駆動部を制御し、前後方向における車体部10の重心位置を、駆動軸C1、C2よりも障害物から遠ざけるようにする。
(もっと読む)
自律移動装置、及び、自律移動装置システム
【課題】操作者である人間を含めた外界移動体の行動を判定してその行動の判定結果に基づいて移動制御する自律移動装置とそのシステムを提供する。
【解決手段】自立的に移動するための移動手段をその一部に備えた自律移動装置は、外界移動体の位置と速度を検出する移動体検出手段と、検出した前記外界移動体の位置とその速度とを基に当該外界移動体の行動を判定する移動体行動判定手段と、移動体行動判定手段による当該外界移動体の行動の判定結果を基に移動手段を制御する移動制御手段とを備え、外界移動体は人間を含んでおり、移動体行動判定手段は外界移動体の行動判定として、人間が自律移動装置自体を目指して移動中か否かをも判定する。
(もっと読む)
自律移動ロボット装置及び自律移動ロボット装置の回避方法
【課題】人やロボットが行き交う中を、障害物を回避しながら迅速に移動可能な自律移動ロボット装置を提供する。
【解決手段】障害物検出手段3で検出された障害物に対して、自律移動ロボット装置1が自己の回避に関する情報を通知する回避方法通知手段8と、障害物検出手段3で検出された障害物から障害物の回避方法に関する情報を取得する他者回避方法取得手段9と、経路生成手段7が従うべき定められた回避方法を1つ以上記憶する回避方法記憶手段5と、定められた回避方法を回避方法記憶手段5から選択する回避方法選択手段6と、を備え、回避方法選択手段6は、回避方法を選択するときの基準に他者回避方法取得手段9が取得した障害物の回避方法に関する情報を用いる。
(もっと読む)
移動ロボット及び環境地図生成方法
【課題】少ない計算コストで高速に足平着地位置の決定精度を向上させることが可能な移動ロボット及び環境地図生成方法を提供する。
【解決手段】本発明に係る移動ロボット100は、環境地図21を参照して移動ロボット100の脚部下端に設けた足平の着地位置を計画し、該計画した足跡計画に基づいて移動する移動ロボット100であって、環境地図21において、計画した足跡計画に影響を与える所定の障害物の認識精度を向上させるものである。
(もっと読む)
移動支援装置、移動体、領域設定方法
【課題】人が携行する随行物を考慮して適切な障害物領域を設定できる移動支援装置、移動体及び領域設定方法を提供すること。
【解決手段】検出された歩行者12の位置に基づき移動体11が回避する歩行者回避領域13を決定し、該歩行者回避領域13を回避する経路を定める移動支援装置100において、歩行者12に随行する随行物14を検出する随行物検出手段21、23と、随行物14が検出された歩行者12には、随行物14が検出されない歩行者12の歩行者回避領域13よりも、歩行者12の左右方向の長さが低減された随行時回避領域15を設定する領域設定手段24と、を有することを特徴とする。
(もっと読む)
移動ロボット及びその動作制御方法
【課題】移動ロボットが"その場回転"を行って目標姿勢に到達する際に、移動空間中に存在する一時的な障害物の影響によって位置・姿勢推定の精度が低下することを抑制する。
【解決手段】ロボット1は、移動空間内に存在する障害物までの距離を距離計測装置10によって計測する。一時障害物検出部13は、距離計測によって得られる障害物の位置情報に基づいて、ロボット1の位置・姿勢推定に用いられる地図に登録されていない"一時障害物"を検出する。回転方向決定部16は、ロボット1の姿勢を目標姿勢に変更するためにロボット1をその場で回転させる際の回転方向を、ロボット1の現在姿勢から目標姿勢に到達するまでの回転角範囲に含まれる"一時障害物"の量に基づいて決定する。
(もっと読む)
ランドマーク装置および移動ロボットの制御システム
【課題】広範囲にわたって高い精度での位置制御を可能とするとともに構造的に非常に簡易であるランドマーク装置を提供する。
【解決手段】所定距離を隔てて離間配置されている二つのマークMnを有する近距離用ランドマークセット400と、近距離用ランドマークセット400よりも広い距離を隔てて離間配置されている二つのマークMfを有する遠距離用ランドマークセット500と、を備える。移動ロボット200がランドマーク装置300から遠方に位置している場合には、2点間の距離が離れている遠距離用ランドマークセット500のマークMfを用いてランドマーク装置300と移動ロボット200との距離および方向などの位置認識を行う。移動ロボット200がランドマーク装置300に近づいたときには、近距離用ランドマークセット400のマークMnによって位置認識を行う。
(もっと読む)
移動ロボットシステム及びその制御方法
【課題】障害物を確実に回避できる移動ロボットシステムを提供すること。
【解決手段】移動ロボットシステム10は、移動可能領域S1と、移動不可能領域S2と、を含む地図情報2aを記憶する記憶手段2と、ロボット本体1の移動経路上の障害物を検出する障害物検出手段3と、ロボット本体1が地図情報2aの移動可能領域S1を移動し、かつ、検出された障害物を回避するように、移動経路を設定する移動経路設定手段4と、設定された移動経路に従って、ロボット本体1の移動を制御する移動制御手段5と、を備える。地図情報2aは、ロボット本体1が障害物と衝突する可能性がある衝突領域S3を含んでいる。また、衝突領域判断手段6によりロボット本体1が衝突領域S3内に入ったと判断されたとき、移動制御手段5は、ロボット本体1の移動速度を減少させる。
(もっと読む)
区域識別システム
【課題】区域識別システムの提供。
【解決手段】区域識別システムはブライユコード図案と移動装置を含む。該移動装置は本体、中央制御ユニット、光源発生器、映像受信器を含む。該中央制御ユニットは該本体を制御し、該光源発生器と該映像受信器は該本体上に配置する。該ブライユコード図案は区域識別情報を備え、しかも該ブライユコード図案の材質は高反射材質である。該光源発生器が発生する光が該ブライユコード図案に照射されると、該ブライユコード図案は該光を該映像受信器に高度反射する。続いて、該映像受信器は該ブライユコード図案の映像を受信し、該中央制御ユニットに伝送することができ、こうして該中央制御ユニットは区域識別上方に基づき、本体の位置を定位する。
(もっと読む)
201 - 220 / 462
[ Back to top ]