
Fターム[5H301GG14]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動速度検出手段 (199)
Fターム[5H301GG14]に分類される特許
81 - 100 / 199
倒立型移動体の制御装置
【課題】倒立型の移動体が振動的になることなく安定に所望の速度で走行できるようにする。
【解決手段】負荷角度θ1が負荷角度指令θ1*の近傍である場合、減衰のみを移動体本体141に加えるように制御する。すなわち、制御装置130は、場合分け線形トルク演算器105と、制御切替器106と、を備える。場合分け線形トルク演算器105は、負荷速度と減衰パラメータとの乗算値に負号を付した減衰トルクと、位置偏差、速度偏差および加速度偏差の一つ以上に所定ゲインを乗算して得る線形フィードバックトルクと、を算出する。制御切替器106は、前記減衰トルクと前記線形フィードバックトルクとを切り替えて出力する。制御切替器106は、負荷角度θ1が負荷角度指令θ1*の近傍である場合、減衰トルクを出力し、それ以外の場合には前記線形フィードバックトルクを出力する。
(もっと読む)
自律航走体運動モニタ用ディスプレイ装置

【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
(もっと読む)
移動体及びその制御方法
【課題】操作意図を反映させて移動させると共に、障害物との衝突を自律的に回避させて移動させる。
【解決手段】移動体は、移動装置21を用いて移動環境内を移動する。移動体は、移動環境に存在する障害物を検出する障害物検出部26と、移動環境内の所定の基準位置を原点とするグローバル座標系において、入力される操作情報に応じた通過点制御量を算出し、その通過点制御量を用いて制御される前記移動体との相対方向に沿って、自己位置から所定の距離離れた地点に通過点を設定する通過点設定部27と、設定した通過点へと到達するための移動動作を計画すると共に、障害物検出部26により進行方向前方に障害物を検出した場合には、その障害物を回避するための移動動作を自律的に計画する動作計画部23と、計画した移動動作に基づいて、移動装置21を制御する移動制御部24と、を備える。
(もっと読む)
走行装置及びその制御方法
【課題】より安定的な走行制御を行うことができる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、周辺の走行環境情報を検出する環境情報検出手段5と、搭乗者により行われた走行操作情報を取得する操作情報取得手段6と、環境情報検出手段6により検出された走行環境情報に基づいて、所定時間後までに生じる外乱情報を推定する外乱情報推定手段41と、操作情報取得手段6により取得された走行操作情報と、外乱情報推定手段41により推定された外乱情報に基づいて、制御指令値を生成する制御指令値生成手段42と、制御指令値生成手段42により生成された制御指令値に基づいて、車輪の駆動を制御して倒立制御を行う倒立制御手段44と、を備えている。
(もっと読む)
車両
【課題】能動重量部を固定した場合に車両加速度及び車両減速度の制限値を減少させることによって、能動重量部が中立位置から大きく外れた位置で固定されたときであっても、可能な限りの運動性能を確保することができるとともに、十分な安全性を保障することができ、使い勝手がよく、かつ、安全で快適に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、前記車体に対して移動可能に取り付けられた能動重量部と、該能動重量部を車体に対して固定する能動重量部ブレーキと、前記駆動輪12に与える駆動トルク及び前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記能動重量部を車体に対して固定した場合に、車両加速度及び車両減速度の制限値を能動重量部を車体に対して固定する直前の車両加速度及び車両減速度より減少させる。
(もっと読む)
車両制御装置、車両、及び車両制御プログラム
【課題】追従車の安全を確保しながらスムーズに追従させる。
【解決手段】追従車1は、先行車2の走行軌跡上の地点と当該地点における先行車2の車速を逐次対応づけて記憶する。追従車1は、記憶した地点のうち、自車よりも最小制御縦距離より前方にある地点を制御直近点として選択し、自車が制御直近点に向かうように旋回指令を出力する。車速が大きいほど最小制御縦距離が大きくなる。追従車1は、自車から制御直近点への方位角θrlが閾値α未満である場合には、目標点Pbcから自車までの目標点距離Ddが0となるように車速指令を出力し、α以上である場合には、制御直近点での先行車2の車速を車速指令として出力する。または、先行車2の地点、ヨーレート、及び車速を逐次対応づけて記憶し、追従車1の横加速度が先行車2の横加速度と等しくなるような車速指令も可能である。
(もっと読む)
移動体及び移動体の位置推定方法
【課題】必要十分なパーティクルフィルタを動的に設定すること。
【解決手段】本発明に係る移動体は、レーザセンサの測定値と複数のパーティクルに基づいて、自己位置を推定する。パーティクルのパーティクル数は、パーティクルの存在分布半径に応じて動的に変更する。エンコーダの出力からの積分による移動量と、過去のパーティクルと、から現在の自己位置を推定し、自己位置推定における複数のパーティクルのうち、レーザセンサ測定値に最もマッチしたパーティクルと、エンコーダによる自己位置と、に基づいて、自己位置の補正量を算出する。そして、自己位置の補正量に基づいて、パーティクルの動作をガウス分布で近似した場合の、パラメータである平均及び標準偏差を算出し、そのパラメータにより規定され、自己位置推定におけるパーティクルを動作させるために使用される運動モデルを算出する。
(もっと読む)
移動機器
【課題】積載部に対して水平方向に働く力がつりあう方向に積載部を揺動させることで被搬送物を積載部に対して相対的に停止したままに保つ移動機器を提供する。
【解決手段】台車20と、台車20を支持する同軸一対の車輪30aと、車輪30aを倒立振子制御により回転駆動する車輪用アクチュエータ22aと、台車20の上方に設けられた積載部70と、台車20と積載部70との間に介在し、第1軸41回りに台車20に対して積載部70を揺動させる第1揺動機構40、及び、第2軸61回りに台車20に対して積載部70を揺動させる第2揺動機構60を備える揺動部と、積載部70における互いに直交する三方向への加速度を測定する加速度検知手段56と、加速度検知手段56により得られる加速度に基づいて、第1揺動機構40及び前記第2揺動機構60の揺動角を制御し、積載部70に対して水平方向に働く加速度の分力と重力の分力とがつりあう方向に積載部70を揺動させる揺動角制御装置82とを有する。
(もっと読む)
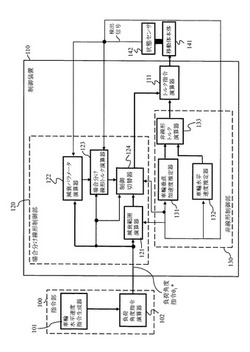
移動ロボットの制御方法
【課題】二次元的な検出能力しかもたないレーザーレンジセンサを用いて高さ方向にも広い範囲でレーザーセンシングを行う移動ロボットの制御方法を提供する。
【解決手段】移動ロボット100は、倒立制御状態にある車体から略水平方向にレーザーを発射するように車体に設けられたレーザーレンジセンサ150を備える。本発明は、車体110の傾斜角度を変更する工程と、車体110の傾斜角度を検出する工程と、レーザーレンジセンサ150による検出値をサンプリングする工程と、レーザーの発射角度とレーザーレンジセンサ150のセンサ値とを関連づけるようにマージ処理する工程と、を備える。
(もっと読む)
車両
【課題】車体傾斜状態の計測値と推定値とを比較することによって、車体傾斜状態の計測値の異常を確実に検出することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の鉛直軸に対する傾斜角を計測する傾斜計測手段と、前記駆動輪12の回転状態及び前記駆動トルクによって前記傾斜角を推定する傾斜推定手段と、前記傾斜計測手段によって計測された傾斜角と前記傾斜推定手段によって推定された傾斜角との差の絶対値が所定値より大きい場合に前記傾斜計測手段によって計測された傾斜角が異常であると判定する判定手段と、を備える。
(もっと読む)
走行車システム
【構成】 走行経路に走行車の減速度が異なる複数の区間を設ける。走行車は、走行車の走行速度と、複数の区間の減速度中で最大の減速度と、機体長パラメータとを用いて、干渉回避距離を演算する。また区間の減速度が最大の減速度よりも小さい区間で、機体長パラメータを、最大の減速度の区間よりも長くする。
【効果】 簡単な制御で、走行車の減速と再加速の繰り返しを回避でき、さらに走行車間の干渉も回避できる。
(もっと読む)
移動ロボット制御システム、経路探索方法、経路探索プログラム
【課題】インフラなどの設置を必要とせずに、自律移動ロボットを所望の走行ルールを反映させた経路に従って移動させること。
【解決手段】移動ロボット制御システムは、移動装置21を有する車両と、車両が所定の移動領域を移動する際の走行ルールが予め定められており、走行ルールに応じて所定の移動領域の経路探索コストを変化させる走行ルール情報を含む地図情報を記憶する地図情報記憶部25(15a)と、地図情報記憶部25(15a)に記憶された地図情報に基づいて、移動始点から移動終点に至る経路を探索する経路探索部23と、経路探索部23で探索した経路に基づいて、移動装置21の制御指令値を生成する移動制御部24と、を備える。
(もっと読む)
車両
【課題】車両の走行速度に依らず、いつ倒立制御を停止しても車体を安定した状態に維持することを可能とし、異常時における緊急停止に即時に対応することができ、高い走行性能や利便性を備え、かつ、安全に使用することができるようにとする。高い走行性能や利便性を備え、且つ、安全に使用することができるようにする。
【解決手段】車両制御装置は、車両の走行速度に応じて減速度の時間変化を予測する減速度予測手段と、減速度予測手段によって予測された減速度の時間変化に応じて、前記姿勢制限手段の位置や形状を制御する姿勢制限制御手段とを備える。
(もっと読む)
移動ロボットの制御装置、移動ロボットおよび移動ロボットシステム
【課題】複数の設定した目標位置間を自律的に移動し、環境変化によって位置推定精度が悪化した場合でも目標位置に正確に位置決めできる移動ロボットの制御装置を提供する。
【解決手段】環境計測結果から分離・選択した特徴配列を目標位置と対応付けて記憶しておき、環境計測結果から特徴配列位置算出結果が得られた場合はその特徴配列位置算出結果を、算出できなかった場合には位置推定部で得られる位置推定結果を、それぞれ利用して移動ロボット116を目標位置まで誘導制御するようにした。
(もっと読む)
移動ロボット、走行計画マップ生成方法、管理システム
【課題】走行計画マップを自動的に生成及び更新可能な移動ロボット、移動ロボットの走行計画マップ生成方法、移動ロボットの管理システムを提供すること。
【解決手段】移動ロボットは、操縦モード時に操縦者が移動ロボットを操縦する操縦部10と、移動ロボットの現在位置を推定する位置推定部12と、移動ロボットの現在速度を検出する速度検出部14と、操縦モード時に、位置推定部12の推定結果と速度検出部14の検出結果を含む移動ロボットの走行履歴情報を収集する走行履歴情報収集部15と、走行履歴情報に基づいて、移動ロボットの走行計画マップ17を生成し、更新する走行計画マップ生成更新部16と、走行計画マップ17を用いて、移動ロボットの走行経路を計画する走行計画部18と、計画した走行経路に追従するように、移動ロボットの走行を制御する走行制御部19を備える。
(もっと読む)
無人移動体システム
【課題】高い移動速度であっても、無人移動体の移動を容易確実に指示できるようにする。
【解決手段】無人移動体Bと、表示部と、これに表示された画像に基づいて、無人移動体Bを遠隔操作する遠隔操作装置Cとを有しており、遠隔操作装置Cには、無人移動体Bを旋回させようとする旋回位置と、この旋回位置における移動方向に対応付けた操作用アイコンを、表示部の画像の指示位置に重畳設定することによる移動指示を行う走行指示手段を設け、遠隔操作装置Cには、走行指示手段によって指示された旋回位置と、この旋回位置における移動方向に基づき、自律移動のための移動経路を計画する経路計画手段と、移動経路に応じた無人移動体の移動速度を計画する速度計画手段と、計画した移動経路と移動速度に従って無人移動体Bを移動させる自律移動手段とを設けている。
(もっと読む)
環境地図生成プログラム、環境地図生成方法及び移動ロボット
【課題】移動体の位置と環境の形状を安定的に推定する。
【解決手段】速度分散モデル予測生成手段12は、記憶手段11から対象の計測点の過去の推定位置と推定誤差の分散とを読み出す。そして、速度分散モデルを適用し、計測点の推定位置及び推定誤差の分散の速度分散付予測値を算出する。第1の現在位置推定手段13は、この計測点の推定位置及び推定誤差の分散の速度分散付予測値と、計測点の3次元計測値と、を用いて移動体の現在位置・姿勢及び推定誤差の分散の予測値を算出する。そして、算出された移動体の現在位置・姿勢及び推定誤差の分散に応じて、計測点の推定位置及び推定誤差の分散が更新される。
(もっと読む)
無人移動体システム
【課題】高い移動速度であっても、無人移動体の移動を容易確実に指示できるようにする。
【解決手段】
移動領域内の測距データを取得するための測距部、及び移動のための駆動機構を搭載した無人移動体と、その測距部によって取得した測距データに基づく移動領域の画像を表示する表示部、及びその表示部に表示された移動領域の画像に基づいて、無人移動体を遠隔操作する遠隔操作装置とを有する無人移動体システムにおいて、無人移動体を移動させるための複数の移動用パラメータのうち、いずれか一つのパラメータによる移動指示を行う移動指示手段を遠隔操作装置に設けたこと、移動指示手段によって指示された移動用パラメータに基づき、駆動機構によって無人移動体を自律的に移動させる自律移動手段を無人移動体に設けたことを特徴としている。
(もっと読む)
無人移動体システム
【課題】高い移動速度の場合には自律して移動し、また、低い移動速度のときには遠隔操作できるようにする。
【解決手段】本発明は、撮像部、測距部及び駆動機構を搭載した無人移動体と、表示部、及びその表示部に表示した画像に基づいて無人移動体を遠隔操縦するための、少なくとも移動方向と移動速度を含む操縦情報を送出する遠隔操縦装置とを有し、撮像部により取得した画像データと、測距部で取得した測距データとに基づいて、移動領域内における移動可能エリアを抽出するエリア抽出手段10aと、遠隔操縦装置から送出された操縦情報に基づいて、自律移動のための移動計画を作成する移動計画作成手段10bと、操縦情報に基づく移動可能エリア内における移動の可否を判定する第一の判定手段10cと、移動が可能であると判定したときには、その移動計画に従って、無人移動体を移動させる自律移動手段10dとを有する。
(もっと読む)
倒立型移動体及びその異常判断方法
【課題】簡素な構成を用いて、倒立制御の異常を高精度に判断すること。
【解決手段】倒立型移動体1は、駆動輪31、32の回転速度Vを検出する速度検出部24と、駆動輪31、32の目標回転速度VTを設定する目標速度設定部231と、駆動輪31、32を制御して、倒立型移動体1の倒立制御を行う倒立制御部232と、速度検出部24により検出された回転速度Vと、目標速度設定部231により設定された目標回転速度VTと、の速度偏差ΔVを算出する速度偏差算出部233と、速度偏差算出部233により算出された速度偏差ΔVに基づいて、倒立制御が異常であるか否かを判断する異常判断部235と、を備えている。
(もっと読む)
81 - 100 / 199
[ Back to top ]