
Fターム[5H301GG14]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動速度検出手段 (199)
Fターム[5H301GG14]に分類される特許
21 - 40 / 199
搬送車システム
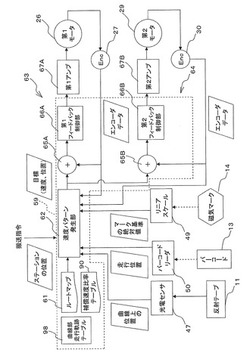
【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム

【課題】地図情報のメモリ容量を効率的に低減させつつ、地図情報の更新を適切に行うことができる移動体マップ装置、その処理方法及びプログラムを提供すること。
【解決手段】移動体マップ装置は、地図情報を記憶する第1記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の移動状態を検出する状態検出手段と、第1記憶手段の地図情報の中から、移動体の現在位置を含む所定領域を読出す読出手段と、第1記憶手段の地図情報から読み出された所定領域を、一時的に記憶する第2記憶手段と、位置検出手段により検出された移動体の現在位置と、状態検出手段により検出された移動体の移動状態と、に基づいて、移動体が所定領域内から外れるときの移動体の移動位置を予測する移動予測手段と、を備える。読出手段は、第1記憶手段の地図情報の中から、移動予測手段により予測された移動位置を含む所定領域を予め読出し、第2記憶手段に記憶させる。
(もっと読む)
移動体システム
【課題】移動体システムにおいて、移動体の干渉を移動開始前に判断するときの演算量を減らす。
【解決手段】自動倉庫1において、第1移載部32A及び第2移載部32Bは、平面内を移動可能に配置されている。メインコントローラ53は、第1移載部32Aが移動を開始する前に、第1移載部32Aの移動予定経路における干渉を確認する。メインコントローラ53は、ステップ分割部74と、ステップ算出部75と、干渉判断部76とを有している。ステップ分割部74は、移動予定経路における時間又は距離を複数のステップに分割する。ステップ算出部75は、両移載部の相互距離、移動向き、速度を考慮することで、干渉が生じる可能性がないステップを算出する。干渉判断部76は、第1移載部32A及び第2移載部32Bの位置計算をすることで干渉の有無を判断するものであり、干渉が生じる可能性がないステップについての両移載部の位置計算を省略する。
(もっと読む)
自律走行体
【課題】不整地・未舗装路においても高速移動可能な経路を作成し、また、舗装路においても道路形状及び自律走行体の運動特性を考慮した走行経路を作成して高速走行ができるようにする。
【解決手段】本発明は、測距部31により走行領域内の測距データを取得する測距データ取得手段30aと、その測距データに基づいて、局所地図を作成する局所地図作成手段30bと、その局所地図に基づいて、自己位置から続く走行可能エリアを抽出し、走行可能エリア地図を生成する走行可能エリア地図作成手段30cと、走行可能エリア地図に基づいて、道なり方向を設定する道なり方向設定手段30fと、設定された道なり方向に基づいて、走行経路を生成する走行経路生成手段30gと、自己位置、及び方位データを取得する自己位置データ取得手段30hと、生成した走行経路及び自己位置データに従って、走行機構を介して走行させる自律走行手段10aとを有する。
(もっと読む)
車両
【課題】路面勾(こう)配に応じて車両の目標加速度を制限することによって、坂道であっても車体が路面に接触することなく、適切にバランスを保つことができ、路面勾配に関わらず、車両の安定した走行状態を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面勾配に応じて車両加速度の目標値を制限するものであって、該車両加速度の目標値の制限値を、車体接地に対応する制限値と駆動トルクの最大値に対応する制限値とのうちの少なくとも1つに基づいて設定する。
(もっと読む)
車両
【課題】車両を移動することなく、起立、傾斜(乗降停止)を行う。
【解決手段】傾斜状態で乗降停止している状態から起立したり、傾斜させて停止する場合、起立や傾斜のためのトルクを車体に作用させると、反作用で車輪が回転して車両が前後に移動してしまう。そこで、搭乗部を前後に移動させることにより、車両本体が傾いた状態でも、その重心が駆動輪接地点を通る鉛直線上にある状態をつくり、その重心が移動しないように、車体傾斜角と搭乗部位置を制御することで、車両を移動させることなく(車輪を回転させることなく)起立、傾斜を実現する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、搬送車システムの搬送効率を向上させる。
【解決手段】搬送車システムは、複数の搬送車3と、複数の搬送車3と順番に通信を行う搬送車コントローラ47とを備えている。搬送車コントローラ47は、優先的に通信を行う優先通信搬送車3を記憶する優先通信搬送車記憶部59を有しており、複数の搬送車3の全てと順番に一度ずつ通信する間に、優先通信搬送車3と複数回通信する。
(もっと読む)
自動搬送車の制御方法
【課題】自動搬送車を横行又は斜行させた後、新たな導線への追従状態に移行するための制御方法であって、新たな導線に円滑に乗り移ることで、追従状態への移行に要する時間を短縮可能な自動搬送車の制御方法を提供すること。
【解決手段】自動搬送車2が横行でガイドライン12へ接近して乗り移るための制御方法は、駆動ユニット3をガイドライン12に接近させる第1の走行ステップと、ラインセンサ351がガイドライン12を検出した後、再びガイドライン12を検出しなくなるまで駆動ユニット3をそのまま前進させる第2の走行ステップと、第2の走行ステップの後、ラインセンサ351によりガイドライン12を再検出できるように駆動ユニット3を操舵する第3の走行ステップと、ラインセンサ351によるガイドライン12の再検出に応じて追従走行制御への切換を実行する移行ステップと、を含んでいる。
(もっと読む)
全方向移動体操作システムおよび全方向移動体操作方法
【課題】操作装置によって全方向移動体を簡易に遠隔で操作する。
【解決手段】全方向移動体500の車両目標速度計算部504は、操作対象である全方向移動体500の存在する車両位置Cを全方向移動体を操作する基準位置を示す操作体基準位置との相対的な位置関係により表わし、かつ、操作装置400に与えられる操作に応じた操作量を、操作体の位置を示す操作体基準位置Sを原点とする座標系において表わされる目標位置Oにより表わすことにより、この車両位置Cから目標位置Oまでの目標移動速度ベクトルを決定する。車輪速度指令演算部505は、この目標移動速度ベクトルに従って基体を駆動させるよう、車輪駆動部506に指示する。
(もっと読む)
移動体の誘導制御システム及び誘導制御方法
【課題】 磁気マーク等のランドマークを床面に分散配置しても、自律移動体に走行軌道の再現性をたかめ、誘導制御システムの低コスト化と柔軟性の向上を実現する。
【解決手段】床面等に設置されたマーカーと、該マーカーを検出して予め定められた走行軌道に沿って自律移動体を自律走行させる際、移動体の走行軌道に基づいて床面等にマーカーを分散して離隔配置する。軌道習得走行により、このマーカーに沿わせながら、再現すべき軌道に沿って移動体を走行させ、移動体の走行面における2次元座標及び走行方向を走行軌道と、マーカー検出部の検出履歴を記録する。記録された走行軌道とマーカー検出履歴に基づいて、マーカーのマップと走行軌道を生成し、移動体を走行させる際、走行軌道とマーカー検出履歴に基づいて、マーカーのマップを更新する。
(もっと読む)
倒立型移動体、その制御方法及び制御プログラム
【課題】安定的に倒立状態を維持できる倒立型移動体、その制御方法及び制御プログラムを提供すること。
【解決手段】倒立型移動体1は、負荷体の傾斜角度である負荷角度を検出する負荷角度手段と、車輪を駆動する駆動手段と、負荷体の倒立状態を維持するように駆動手段の駆動を制御する制御手段と、制御手段が駆動手段に対して出力する制御信号と、負荷角度検出手段により検出された負荷角度とに基づいて、車輪と路面との間の滑り量を時間で微分した微分値を演算する滑り演算手段と、滑り演算手段により演算された微分値に基づいて、所定時間後において、負荷体の倒立状態の維持が不能となる負荷角度の限界値を演算する負荷角度演算手段と、を備えている。制御手段は、負荷角度演算手段により演算された負荷角度の限界値に基づいて、駆動手段の駆動を制御する。
(もっと読む)
自律移動方法及び自律移動体
【課題】環境磁場を利用する自律移動を屋外で行う場合でも、ロボットが自己位置を誤って認識するのを防ぐことのできる自律移動方法及び自律移動体を提供する。
【解決手段】ステップ1:互いに反転して配置される第1センサ201及び第2センサ202で磁気、方位を計測し、記録しておく。このデータを教示データ(第1教示データ、第2教示データ)という。
ステップ2:自律移動する際に、各々のセンサで磁気、方位を計測する。このデータを実測データと(第1実測データ、第2実測データ)いう。
ステップ3:実測データを教示データに照合して両データの偏差が0になるように位置を制御する。この照合に際し、不安定な磁気要素を相殺する。
(もっと読む)
制御装置および自動作業車
【課題】山林などのGPS技術に用いられる信号を受信しづらい環境、周囲の状況の変化が大きい環境においても、自動で車両を走行させるときの正確性を向上させること。
【解決手段】本発明の実施形態における運搬車は、車体を移動させるための操作を受け付ける操作手段から操作情報を取得する操作取得手段と、車体の傾きを測定する傾斜測定手段と、操作情報に応じて車体が移動するように移動手段を制御する手動制御手段と、手動制御手段の制御において用いられた操作情報、および制御が行われているときに測定された傾きを示す測定情報を取得して記録情報を生成する記録手段と、記録情報に記録された操作情報に応じて車体が移動するように、移動手段を制御する自動制御手段と、記録情報における傾きと測定される傾きとが予め決められた関係を満たすように制御の内容を補正する補正手段とを具備する。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
倒立二輪車、その姿勢制御方法及びプログラム
【課題】特別なロック機能等を設けることなく、胴囲の大小にかかわらず、搭乗が可能な倒立二輪車、その姿勢制御方法及びプログラムを提供する。
【解決手段】倒立二輪車は、ユーザが搭乗するステップを有する本体と、本体と同軸上に取り付けられた1対の駆動ユニットと、駆動ユニットにより回転駆動される左右の車輪と、本体に取り付けられ前記ユーザがつかまるためのハンドルと、倒立二輪車の姿勢情報を含む動作状態を検出する動作状態検出手段102と、検出した姿勢情報と入力する姿勢情報指令とに基づいて、駆動ユニットの駆動速度指令を生成する姿勢制御手段103と、ユーザがステップに搭乗した際に、ユーザとハンドルとの間の距離が最適になるように設定した場合の本体ピッチ角度の水平方向からのずれ度を調整角度として検出した姿勢角度を調整する調整手段105とを有する。姿勢制御手段103は、調整角度を姿勢情報指令として姿勢制御を実行する。
(もっと読む)
自己推進装置用格納式ライン案内
【課題】自己推進芝刈り機のような、自己推進装置のための格納式ライン案内を提供する。
【解決手段】操作部がストリングまたはラインを動かすことによって、この装置の移動速度および移動方向を制御する。引っ込み可能および伸長可能なラインが装置に取り付けられており、ラインが伸長しているときには、引っ込み方向に張力を受ける。ラインの伸長長を監視し、ラインの伸長長を選択長に維持するために、ラインの伸長長に応答して、装置の移動速度を制御する。装置に対するラインの角度を監視し、ラインの角度を選択角度に維持するために、ラインの角度に応答して、装置の移動方向を制御する。
(もっと読む)
無人移動体の制御方法
【課題】高速度で移動する無人移動体に対しても、きめ細かい移動方向の指示を迅速且つ簡単に行い得る無人移動体の制御方法を提供する。
【解決手段】移動領域内の画像データを取得する遠隔操縦用カメラ14を搭載した半自律走行車Bの移動を携帯型遠隔操縦装置Aによって制御する方法であって、携帯型遠隔操縦装置Aは遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有し、携帯型遠隔操縦装置Aのディスプレー40の画像上におけるカーソルスティック51による3点のポイント&クリック操作入力により、半自律走行車Bを旋回させる位置を指示すると共に、旋回位置での旋回方向及び移動距離をベクトルで指示し、半自律走行車B側において、ディスプレー40の画像上で指示した画像座標系の旋回位置及び旋回ベクトルを世界座標系に変換させ、変換後の世界座標系の旋回位置及び旋回ベクトルの指示に従って半自律走行車Bを移動させる。
(もっと読む)
移動体及びその制御方法
【課題】移動体に搭乗者が乗降する際の安定性を向上させることができる移動体及びその制御方法を提供すること。
【解決手段】本発明にかかる移動体1は、駆動輪11、補助輪12、状態センサ13、制御部14、車体15、制動装置163を備える。車体15は、駆動輪11に支持され、搭乗者が搭乗可能である。補助輪12は、断面が円形状であり、少なくとも走行停止時に接地可能に配置される。また、補助輪12は、駆動輪11に対して、搭乗者の乗降時における車体15への搭乗者の荷重による荷重位置に対応する方向に配置される。状態センサ13は、車体15の走行状態を検出する。制御部14は、走行状態に基づいて駆動輪11を制御し、車体15の倒立制御を実行する。制動装置163は、補助輪12の回転を制動する。
(もっと読む)
無人移動体の制御方法及び遠隔操縦装置
【課題】遠隔操舵部を有する遠隔操縦装置に、他の遠隔操縦装置から操舵主導権を移管するに際して、無人移動体を停止させずに操舵主導権を移管し得る無人移動体の制御方法及び遠隔操縦装置を提供する。
【解決手段】ジョイスティックタイプの遠隔操舵部50及び自律走行車Cの遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有する遠隔操縦装置Bに操舵主導権を移管するに際して、遠隔操縦装置Bのディスプレー40の画面に、自律走行車Cの操舵範囲SAと、自律走行車Cの実際操舵位置SPと、この実際操舵位置SPに基づいて設定される安全許容範囲SZを表示させると共に、遠隔操縦装置Bにおける遠隔操舵部50の指示スティック51の位置51Aを重ねて表示させ、遠隔操縦装置Bのディスプレー40画面における指示スティック51の位置51Aを安全許容範囲SZ内に入れた状態で、管制局Aから遠隔操縦装置Bへの操舵主導権の移管を許可する。
(もっと読む)
無人移動体の制御方法及び無人移動体
【課題】自律移動可能な半自律走行車を遠隔操縦するに際して、一旦停止させたり大幅に減速させたりすることなく、障害物の回避動作や交差点での進路変更を安全に行わせることが可能である無人移動体の制御方法及び無人移動体を提供する。
【解決手段】測距データから移動経路を作成して、移動経路上を自律して移動可能な半自律走行車Bの制御方法であって、移動中に新規操舵指令及び新規速度指令を得た時点で、これに基づく新規移動経路T上で且つ現在速度及び新規速度のうちの大きい方の移動速度に対応する制動距離内に障害物Dが有るか否かを判定し、障害物Dが有る場合には、新規移動経路Tの横に障害物回避経路Rを設定すると共に回避経路R上の障害物Dの有無を判定し、以降、障害物Dのない障害物回避経路Tが設定されるまで上記処理を繰り返し、障害物回避経路Tを設定し得ない場合には、半自律走行車Bを停止させる。
(もっと読む)
21 - 40 / 199
[ Back to top ]