
Fターム[5H301GG19]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 他の移動体との距離検出手段 (55)
Fターム[5H301GG19]に分類される特許
1 - 20 / 55
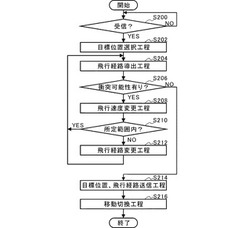
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
対象物との相対位置計測方法と装置

【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
自動追尾式自走台車
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
自律移動体
【課題】移動可能な障害物が安全に通過できるように、停留領域を予め定めることなく、自ら設定した待避方向に移動することが可能な自律移動体を提供する。
【解決手段】自律移動体1は、自機の大きさD2を記憶する記憶部22と、障害物情報を取得するレーザレンジセンサ12と、取得された障害物情報に基づき、干渉障害物66が存在する領域の両端部の位置であって、通路面と平行な面において自機の移動目標方向72と略直交する方向の両端部の位置を示すエッジ点86を特定する障害物特定部233と、自機の大きさD2、及び、エッジ点86に基づいて、待避方向を設定する方向設定部237と、待避方向へ自機が向かうように制御する移動制御部25とを備える。
(もっと読む)
移動機械の移動方法
【課題】移動機械および移動機械周囲の状況を常に把握しつつ当該移動機械を移動すること。
【解決手段】複数の移動機械1A,1Bを用い、全ての前記移動機械1A,1Bにおいて、任意の移動機械1B(1A)により他の1つの移動機械1A(1B)を包含する空間情報を取得し、当該空間情報に基づいて前記他の1つの移動機械1A(1B)を移動させる。これにより、移動機械1A,1Bおよび移動機械1A,1B周囲の状況を常に把握しつつ当該移動機械1A,1Bを移動することができる。
(もっと読む)
ロボットのプログラム及び情報処理装置のプログラム
【課題】環境地図の再作成に要するコストを低減し、かつ環境地図をタイムリーに再作成することのできる技術を提供する。
【解決手段】所定領域内の固定物の配置位置を含む地図情報を記憶し、地図再作成の際、所定領域内をロボット10を移動させつつ(1)乃至(5)を繰返し実行する。(1)エンコーダ21を積算してロボットの自己位置を算出する(2)ロボットの所定視野角範囲内にある固定物及び移動可能物までの距離を測定する(3)測定した距離と、地図情報から得られる固定物までの距離とから補正自己位置を求める(4)測定値の内、移動可能物までの距離を表す測定値を抽出する(5)抽出した測定値と補正自己位置とから移動可能物の配置位置を算出する。そして、算出した移動可能物の配置位置を集約処理して新たな配置位置を求め、求めた新たな配置位置を外部に出力する。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
ロボットおよびロボットシステム
【課題】
本発明はロボットを複数台運用するロボットシステムに関する。
【解決手段】
第1のロボットは、物体の反射光強度を計測する計測部と、計測部により得られた計測結果を解析する演算部と、第1のロボットを移動させる駆動部と、を備える。第2のロボットは再帰性反射特性を有する複数のマーカを備え、第1のロボットの演算部は、計測部の計測結果に基づき第2のロボットの複数の前記マーカの位置を算出し、算出の結果に基づき第2のロボットの位置および姿勢を認識し、第2のロボットの位置および姿勢の認識の結果に基づき第1のロボットを移動させるためのパラメータを算出し、第1のロボットの駆動部は、パラメータに基づき第1のロボットを移動させる。
(もっと読む)
自律移動装置
【課題】自律移動装置において、一定数以上の移動物体が存在する領域の通過を安定かつ高速に可能とする。
【解決手段】自律移動装置1は外界センサ部2、移動物体検出手段40、自己位置推定手段41、追従対象選択手段42、経路生成手段43、駆動部3を備える。追従対象選択手段42は、移動物体の物体位置座標108、速度ベクトル109に基づいて本装置1の目標方向と一番近い移動物体を追従対象として選択し、経路生成手段43が追従対象の背後までの走行経路を生成する。追従対象選択手段42は対象物体を追従中にも他の移動物体の物体位置座標108、速度ベクトル109を取得して追従対象を変更したほうが良いと判断した場合、追従対象を変更し、経路生成手段43が変更後の対象物体までの走行経路を生成する。
(もっと読む)
車両制御装置、車両、及び車両制御プログラム
【課題】追従車の安全を確保しながらスムーズに追従させる。
【解決手段】追従車1は、先行車2の走行軌跡上の地点と当該地点における先行車2の車速を逐次対応づけて記憶する。追従車1は、記憶した地点のうち、自車よりも最小制御縦距離より前方にある地点を制御直近点として選択し、自車が制御直近点に向かうように旋回指令を出力する。車速が大きいほど最小制御縦距離が大きくなる。追従車1は、自車から制御直近点への方位角θrlが閾値α未満である場合には、目標点Pbcから自車までの目標点距離Ddが0となるように車速指令を出力し、α以上である場合には、制御直近点での先行車2の車速を車速指令として出力する。または、先行車2の地点、ヨーレート、及び車速を逐次対応づけて記憶し、追従車1の横加速度が先行車2の横加速度と等しくなるような車速指令も可能である。
(もっと読む)
自律移動装置
【課題】進行方向を長手方向とする本体形状であっても、本体周囲の障害物を適切に避けて目標物を追従できる自律移動装置を提供する。
【解決手段】レーザレンジファインダで捕捉した目標物の本体に対する相対位置情報と障害物センサで検出した周囲障害物の情報とに基づいて、本体の進行方向を、目標物の方向に障害物が検出されない場合はこの目標物の方向に決定し、障害物が検出される場合は本体を中心に放射状に広がる空間で障害物が検出されない空間のうち目標物に最も近い空間の方向に決定する。そして、決定された進行方向に本体を向けるために旋回を要するとき、その旋回領域内に障害物があるときには進行方向を直進方向に補正する。
(もっと読む)
障害物回避機能を有する移動制御装置
【課題】計算負荷が低く、移動がスムーズであり環境の動的変化などノイズに強いロバストな移動動作が可能な制御装置を提供する。
【解決手段】障害物回避機能を有する移動制御装置13は、移動体1と、この移動体1に設けられ、移動体進行方位を検出する検出手段14−17と、移動体1に設けられ、障害物の位置およびこの障害物までの実計測距離を計測し、この検出手段14−17が検出した移動体進行方位に対する障害物の方位角を出力する計測手段9−12と、計測手段9−12が出力した障害物の方位角の大きさに応じて、実計測距離を変化させて疑似距離を生成する疑似距離生成手段と、この疑似距離生成手段が生成した疑似距離に基づき、移動体1が障害物を回避するよう移動体1の動作を制御する制御手段と、備える。
(もっと読む)
自律移動装置およびその制御方法
【課題】 障害物の存在にかかわらず目標物の位置を的確に捕らえながら、その目標物に対する常に確実かつ安定した追従移動を可能とする信頼性にすぐれた自律移動装置およびその制御方法を提供する。
【解決手段】 子ロボット21は、親ロボット1を捕捉し、捕捉した親ロボット1に対する相対位置を算出し、算出した相対位置に応じて親ロボット1に対する追従移動を制御する。このとき、子ロボット21は、自己位置を推定して親ロボット1の位置との誤差を求めており、親ロボット1の捕捉が不可能な場合に、推定した自己位置を上記求めておいた誤差に応じて補正し、補正した自己位置から親ロボット1に対する相対位置を算出、算出した相対位置に応じて親ロボット1に対する追従移動の制御を継続する。
(もっと読む)
移動装置
【課題】物体による移動の妨げを効率的に回避する観点から適当に移動または行動しうる移動装置を提供する。
【解決手段】第1移動条件が満たされていないものの、第2移動条件が満たされており、かつ、物体2が第1分類に属すると判定された場合、物体2に第1態様または任意態様にしたがった移動を促すようにロボット1の動作が制御される。「第2移動条件」は、物体2が第1態様にしたがって変位することにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができるという条件である。「第1分類」はロボット1の行動態様を認識することができ、かつ、自律的に移動することができる人間、他のロボット等の物体の分類を意味する。このようにロボット1の促し動作に応じて物体を自律的2に変位させることにより、ロボット1が現状の目標位置軌道P0にしたがってこの物体2に妨げられずに移動することができることが事前確認される。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、搬送車の走行を好適に制御し、効率的な搬送を可能とする。
【解決手段】搬送システムは、軌道(100)と、軌道上を夫々走行する複数の搬送車(200)と、被搬送物(400)を保管する複数の保管棚(500)と、複数の搬送車に対して、被搬送物を搬送するように搬送指示を行う搬送指示手段(320)と、搬送指示に先立って、一の搬送車を搬送元に呼び込むと共に搬送指示が行われるまで待機状態にさせる搬送予告手段(310)と、待機状態とされた一の搬送車から所定距離の範囲内への他の搬送車の進入を検出する進入検出手段(330)と、進入から搬送指示が行われるまでの残り期間が所定期間より長いか否かの判定を行う判定手段(360)と、残り期間が所定期間より長い場合に、待機状態を解除するように一の搬送車を制御する制御手段(370)とを備える。
(もっと読む)
自律移動ロボット装置及びかかる装置における飛び出し衝突回避方法
【課題】人やロボットが行き交う環境下で使用され、飛び出しによる衝突を回避しながらも迅速な移動が可能な自律移動ロボット装置とそのための飛び出し衝突回避方法を提供する。
【解決手段】障害物を検出する障害物検出部3と、検出した前記障害物を、予め定められた回避方法に基づいて回避しながら目的地まで到達する経路を速度と共に設定する経路生成部7と、それらを搭載して移動する移動部2とを備え、人混在環境において稼動する自律移動ロボット装置は、更に、当該自律移動ロボット装置の進行方向に存在する物体の端点と、当該端点との間の距離を測定し、当該物体の端点を検出した場合、当該端点を中心として、ロボット装置の進行方向における死角から飛び出す障害物との衝突を回避するよう、その経路と速度を制御することを特徴とする。
(もっと読む)
ロボットシステム
【課題】
大量で、かつ、物流量が大幅に変動する物品を取扱う搬送システムにおいて、物流量が変動しても、フレキシブルに、常に効率良く搬送できるシステムを構築することが目的である。
【解決手段】
上記目的を達成するため、荷物を搭載する台車と、台車が搬送待機状態であることを認識する第1のロボットと、搬送待機状態の台車を設定された場所まで搬送する第2のロボットを備え、第1のロボットと第2のロボットが連動して走行することにより、解決できる。作業者により出荷先別に物品を搭載した台車が搬送待機場所に配置されると、第1のロボットは距離センサの情報からその台車が搬送待機状態であることを認識する。第1のロボットに連動することで、第2のロボットはその台車を指定された出荷先まで搬送する。第1のロボットが主に周囲環境の状況把握を行うことを役割とし、第2のロボットが台車を連結して搬送することを役割とすることにより、安全性を確保しながら、フレキシブルで、かつ、高効率の輸送を実現できる。
(もっと読む)
自律移動装置及び自律移動装置の回避方向表示方法
【課題】人やロボットが行き交う中を、障害物の回避方向を分かり易く表示して人に安心感を与える、自律移動装置及び自律移動装置の回避方向表示方法を提供する。
【解決手段】自律移動装置の移動方向に存在する複数の障害物を検出する障害物検出手段と、予め記憶された回避方法を記憶する回避方法記憶手段と、前記障害物検出手段による複数の障害物の検出に基いて、前記回避方法記憶手段から各障害物を回避する回避方法を読み出して回避経路を生成する回避経路生成手段と、上記回避経路生成手段からの回避経路に基いて各障害物に対する複数段先の回避方向を方向表示手段で表示するようにした。
(もっと読む)
1 - 20 / 55
[ Back to top ]