
Fターム[5H301HH10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 駆動輪の回転差を用いた操舵 (225)
Fターム[5H301HH10]に分類される特許
201 - 220 / 225
自走式ロボット
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
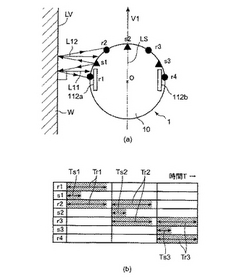
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
自走式掃除ロボット、自走式ロボットおよび自走式ロボットの走行を制御するためのプログラム

【課題】 直進走行の性能を向上させることのできる自走式掃除ロボット、自走式ロボットおよび自走式ロボットの走行を制御するためのプログラムを提供すること。
【解決手段】 予め定められた走行パターンで走行する自走式ロボットであって、基準位置からの進行方向である角度を検出するためのジャイロセンサ28と、基準位置からの走行距離を検出するための左ロータリエンコーダ22,右ロータリエンコーダ23と、本体を移動させるための左右の駆動輪と、左右の駆動輪を駆動して走行させるための左駆動輪モータ60,右駆動輪モータ61とを備える。CPU10は、走行バターンが計画路線に従い走行する直進走行パターンである場合に、ジャイロセンサ28および左ロータリエンコーダ22,右ロータリエンコーダ23からの検出量に基づいて、計画路線からのずれ量を算出し、算出されたずれ量に基づいて左駆動輪モータ60,右駆動輪モータ61の駆動を制御する。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットを、所定の領域内で略均一に走行させる。
【解決手段】 CPU171は、機能的に、本体部10が壁面(又は、障害物)と離間している距離である離間距離を検出する検出部171aと、壁面(又は、障害物)に沿って走行させる制御モードである壁沿いモード(第1モードに相当する)での走行をさせる壁沿い走行部171bと、室内を直進と回転とを繰り返して走行させる制御モードであるランダムモードでの走行をさせるランダム走行部171cと、壁沿いモードとランダムモードとを切り換える切換部171eとを備え、切換部171eは、3回分の直進走行時間が所定の条件を満たす場合に、ランダムモードを壁沿いモードへ切り換える。
(もっと読む)
移動ロボット及び遠隔操作システム
【課題】ロボットと遠隔の操作者側との間に伝送遅延が生じていてもロボットを安全に移動させる
【解決手段】遠隔操作により指示された方向に移動手段にて移動する移動ロボットであって、少なくとも移動方向前方の障害物を検出する検出部と、前記検出部が検出した障害物までの距離を算出する障害物判定部と、監視センタから移動方向を受信する通信部と、前記障害物までの距離に基づき該障害物に接触する前に停止可能な移動速度を算出する速度算出部と、を備えて、前記監視センタから受信した移動方向に前記速度算出部が算出した速度で移動することを特徴とした移動ロボット。
(もっと読む)
充電式走行システム
【課題】 コストの高騰を抑制しつつ確実に自動充電を行うことが可能な充電式走行システムの提供を課題とする。
【解決手段】 充電装置100の本体部101と給電部102とに、それぞれ赤外線の反射率の異なる色(黒色形成部BK、白色形成部WT)が形成されており、これにより、前横壁センサ36F(36FRまたは36FL)のセンサ出力値が変化することを利用して給電部102の幅を計測し、この計測結果が予め記憶されている給電部102の幅(w)と一致した場合には、充電を行うべき充電装置100であると判定するように構成されているため、充電装置100側に特別な装置を設ける必要がなくなるとともに、確実に充電装置を発見し、自動充電を行うことが可能となる。
(もっと読む)
移動体用の障害物検出装置
【課題】姿勢安定装置のような機構を不要とし、かつハフ変換に比較して処理負荷を軽減することができる移動体用の障害物検出装置を提供する。
【解決手段】距離画像センサ11は、移動体本体2に搭載され移動体本体2が走行しようとする面を含む空間領域を斜め下向きに撮像する。基準画像記憶部15には、移動体本体2が平面上を走行する際に距離画像センサ11で生成されることが予測される角度範囲内の平面の距離画像が所定の刻み幅で候補基準画像として格納される。差分画像生成部12は、基準画像記憶部15に格納された複数の候補基準画像のうち距離画像センサ11で生成された距離画像との差分画像を生成し、基準距離画像選択部13は、差分画像において一致領域の面積が最大になる候補基準画像を基準距離画像として選択する。判断部14は、この基準距離画像に対する差分画像の一致領域以外を障害物が存在する領域とする。
(もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、所定区間の始点終点間の距離及び角度差を記録した経路情報が記憶されている。そして、所定区間の終点が判別されると、車輪情報算出部57が、所定区間の始点終点間で計測された車輪回転量と、記憶部15の経路情報とに基づき、車輪径や車輪間隔等の車輪特徴量を算出して記憶部15に記憶する。位置算出部55は、計算された車輪特徴量と計測された車輪の回転量とに基づき現在位置を算出する。
(もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、区間毎に設定した車輪径および車輪間隔等の車輪特徴量が記憶されている。位置算出部55は、現在走行している区間に対して設定された車輪特徴量と、計測された車輪の回転量とに基づき、現在位置を算出する。経路が左右に傾斜している場合に、谷側の車輪径を小さく設定しておけば、特別な処理を行わずに現在位置を正確に求められる。車輪情報算出部57は、区間の始点終点間で計測された車輪回転量と、同区間の距離および区間両端の角度差といった経路情報とに基づき、車輪特徴量を算出して、この車輪特徴量が位置算出部55で使用される。
(もっと読む)
ロボット掃除機およびその制御方法
【課題】 掃除領域の分布を均一に行うロボット掃除機を提供すること。
【解決手段】 本体を掃除面上で移動させる走行駆動ユニットと、本体の周りの障害物を検出する障害物検出ユニットと、走行駆動ユニットの移動距離を検出する走行距離検出ユニットと、障害物検出ユニットを介して障害物が検出された場合、本体を前記障害物から所定の距離離れた地点に移動させ掃除走行パターンに沿って走行させ、障害物が検出されるたびに距離を可変的に適用して走行駆動ユニットに走行信号を出力する中央処理ユニットと、からロボット掃除機を構成した。
(もっと読む)
移動ロボット
【課題】 段差を非接触で自動的に検知し、段差に応じて乗越え方法を選択することができる移動ロボットを提供するにある。
【解決手段】 移動ロボットの本体フレーム10は、駆動車輪6,12によって走行路上で移動され、本体フレームの走路方向対して前方には、第1の従動輪30が設けられ、その後方には、第2の従動輪32が設けられている。本体フレームの走路方向の距離は、ある俯角で走行路を観察する距離センサ部28によって検出される。俯角を略一定に維持したまま第1の従動輪及び距離センサを一体的に前記本体フレーム上で上下動させる第1の上下動機構及び第2の従動輪を上下動させる第2の上下動機構が本体フレームに設けられ、距離センサ部からの距離信号に基づいて走路上の段差が検出されて本体フレームの移動とともに第1及び第2の上下動機構が上下動される。
(もっと読む)
災害救助ロボット、及び災害救助支援システム
【課題】 居室内に予め設置され、平常時にインターフォンとして機能し、災害時に災害救助機能を有する災害救助ロボットを利用した災害救助支援システムを提供することを課題とする。
【解決手段】 支援システム1は、複数の居室9にクローラ機構部をコンパクトに格納した状態で設置された複数のロボット2と、該ロボット2と無線通信ネットワーク10を介して種々の情報を送受可能に形成され、災害の発生時には、ロボット2を遠隔制御し、居室9に取り残された要救助者11の探索及び発見に利用可能な支援コンピュータ3とによって主に構成されている。ここで、平常時及び災害時に取得され、支援コンピュータ3に記憶された居室情報20等を利用し、要救助者11の早期の発見が可能となる。
(もっと読む)
自走式掃除機
【課題】 コストの高騰を抑制するとともに、未清掃エリアの清掃を確実に行うことが可能な自走式掃除機の提供を課題とする。
【解決手段】 本体BDが位置する現在位置の座標(Xc、Yc)、および、マッピングが行われることにより記憶された未清掃エリアの座標(Xn、Yn)から、下記式(1)を用いて得られる数値(L)の最小値を算出し、最小値とされた数値(L)にかかる未清掃エリアを特定するとともに、同未清掃エリアまで本体BDを走行させて清掃を行うように構成されている。
L=(Xc−Xn)2+(Yc−Yn)2…式(1)
(もっと読む)
ロボットシステム
【課題】 外部環境に影響されずに、ロボットの位置を正確に認識でき、システムの構成に必要とする費用を最小化できるロボットシステムを提供すること。
【解決手段】 本発明は、位相情報を有する光を送出する光送出部と、超音波を送出する超音波送出部を有する位置情報送出ユニットと;前記光を受信する光受信部と、前記超音波を受信する超音波受信部と、前記光受信部を通じて受信した前記光の前記位相情報と前記超音波受信部を通じて受信した前記超音波と、に基づき、前記位置情報送出ユニットに対する相対位置を測定する位置測定部を有するロボットと;を含むことを特徴とする。これにより、外部環境に影響を受けることなく、ロボットの位置を正確に認識できて、システムの構成に必要とする費用を最小化できる。
(もっと読む)
移動ロボットの物体位置認識装置及びその方法
【課題】 ロボット掃除機などの移動ロボットが物体と衝突した時、物体の位置を正確に認識することができ、衝突回避動作に要する時間を減少させることができる移動ロボットの物体位置認識装置及びその方法を提供する。
【解決手段】 移動ロボットの物体位置認識装置は、移動ロボットのバンパー50の第1領域を感知し移動ロボットのバンパーが物体と衝突した時バンパーの第1移動距離値L1を測定する第1光学センサ10と、バンパーの第2領域を感知しバンパーが物体と衝突した時バンパーの第2移動距離値L2を測定する第2光学センサ20と、測定したL1とL2に基づいて移動ロボットの移動方向を制御するための制御信号を発生するマイクロコンピュータ30と、マイクロコンピュータ30の制御信号によって移動ロボットを移動させる駆動部40とを備える。
(もっと読む)
自走式掃除機
【課題】 床面上に電気コードのような固定されない軽量の障害物があっても乗り越えることができる自走式掃除機を実現すること。
【解決手段】 本体1と、該本体1を床面上で走行させる走行手段(4)と、前記本体1の周辺物体を認識して前記本体1の移動方向を前記走行手段(4)に指令する制御手段(6)と、床面上の塵芥を吸い込んで蓄える集塵手段とを備えた自走式掃除機において、前記制御手段(6)は、前記本体1の前方床面上の物体を検出し、該検出結果に基づいて、前記本体1の進行方向の前方を前記走行手段(4)を基点として床面から持ち上げる持ち上げ手段を備えるようにする。
(もっと読む)
追従移動装置
【課題】 周囲状況に応じたスムーズな追従を行う追従移動装置を提供する。
【解決手段】 周囲状況検出部102からの周囲状況により、追従距離制御部103において先行移動体202との追従距離を設定し、移動制御部104により追従制御を行うことにより、周囲状況に応じて最適な距離を保った、スムーズな追従動作を実現することができる。
(もっと読む)
自走台車の走行制御方法
【課題】 本発明は、自在車輪を備える自走台車のスイッチバック動作時に、自在車輪の作用により自走台車に起きる左右の横揺れを低減する技術を提供することを課題とする。
【解決手段】 基本ライン51に沿って往復走行させることを基本とする自走台車10の走行制御方法において、走行制御部18は、方向変更指令を受けたときに停止時に操舵駆動輪12を所定角度θだけ操舵する第1操舵工程54と、この状態で所定距離Lを前進させることで基本ライン51から離脱させる工程55と、基本ライン51に向けて操舵する第2操舵工程56と、この状態で所定距離Lを前進させて基本ライン51まで自走台車10を戻す工程57と、自走台車10が基本ライン51に到達したときに操舵を戻して自走台車10を基本ライン51に沿って走行させる第3操舵工程58とからなる一連の制御を実施するものである。
(もっと読む)
充電式走行システム
【課題】 コストの高騰を抑制するとともに、正確に充電装置まで走行機を自動走行させ、確実に充電を行うことが可能な充電式走行システムの提供を課題とする。
【解決手段】 自走式掃除機10のバッテリ−27の残量が少なくなると、自動掃除を中断するとともに掃除機構を停止させ、壁際走行を行いつつ前方の障害物が検知されると、横壁センサ36により同障害物が検知されている間、ロ−タリ−エンコ−ダ38にて本体BDの走行距離を計測することにより、同障害物の奥行きを計測する。そして、計測された走行距離(X)が予め記憶された充電装置100の壁面から突出した高さ(H)と同じである場合には、同障害物が充電装置100であると判断し、自走式掃除機10の充電端子27aと、充電装置100の給電端子101とを接続させる走行制御を行う。
(もっと読む)
移動ロボット
【課題】 障害物が存在する環境下で移動する移動ロボットにおいて、リアルタイムにかつ効率的な目的地への移動を実現することができる移動ロボットを提供する。
【解決手段】 移動可能なロボット本体部の自己位置を計測し、本体部の移動範囲の地図情報を地図データベースに格納し、自己位置情報と地図情報に基づいて地図情報上に設定されかつ本体部の移動に対して障害物となる障害物情報を検出可能な仮想センサの検出領域において障害物情報を抽出し、抽出された障害物情報に基づいて本体部が移動するための移動経路を算出する。
(もっと読む)
無人掃除機
無人でランダムに移動して床面を掃除でき、安価なコストで製造することができ、故障頻度を少なくでき、壁面に沿ってその近傍を掃除でき奥まった場所に入り込んでしまっても脱出することができる無人掃除機を提供する。
掃除機と、この掃除機が取り付けられるケーシング10と、このケーシング10の内部に、水平面内で旋回自在に取り付けられた走行部30と、ケーシング10および走行部を、互いに水平面内で旋回させる旋回機構50とから構成されている。前記走行部30が、水平軸廻りに回転自在に設けられたシャフト34と、このシャフト34の一端に、固定して取り付けられた駆動輪と、シャフトの他端に、回転自在に取り付けられた走行輪36とから構成されており、走行輪36とシャフト34との間に、クラッチ機構40が設けられている。  (もっと読む)
(もっと読む)
201 - 220 / 225
[ Back to top ]