
Fターム[5H301HH10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 駆動輪の回転差を用いた操舵 (225)
Fターム[5H301HH10]に分類される特許
61 - 80 / 225
乗用移動体の駆動制御装置及び駆動制御方法、乗用移動体
【課題】対象物に対する乗用移動体の走行を適切に支援する。
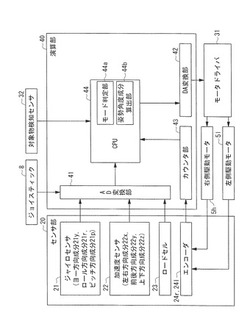
【解決手段】乗用移動体1は、姿勢のピッチ方向の角度を検出するジャイロセンサ21と、ジャイロセンサ21が検出したピッチ方向の検出角度に基づいた倒立振子制御により、各車輪3r,3lの駆動トルクを制御するCPU44と、周囲に存在する対象物と乗用移動体との距離を検出する対象物検知センサ32と、走行速度を検出するエンコーダ24r,24lと、を備え、CPU44が、対象物と乗用移動体との距離に応じた筐体のピッチ方向の角度補正成分を算出し、算出した角度補正成分をピッチ方向の検出角度に加算してピッチ方向の角度を補正し、補正したピッチ角度である加算値に基づいた倒立振子制御を行い、各車輪3r,3lの駆動トルクを制御する。
(もっと読む)
ロボット制御装置、ロボット制御プログラムおよびロボット制御方法

【課題】ロボットの自己位置推定に関わる誤差を正確且つ効率的に調整する。
【解決手段】ロボット制御装置1は、ロボット本体の旋回開始位置から所定位置を中心にして、当該ロボット本体を旋回前後の位置が近似した位置となるように所定角度旋回させる旋回指示を検出すると、当該ロボット本体を移動させる2つの車輪の回転動作に応じて、当該ロボット本体の旋回を開始する移動制御部10と、当該ロボット本体から離間した位置にある目印を基準にして、当該ロボット本体の旋回前後に関わるロボット位置およびロボット方位を計測する計測部20と、計測した旋回前後に関わるロボット位置間の差分および旋回前後に関わるロボット方位間の差分に基づき、ロボットの車輪に関わる誤差を算出する算出部30とを備える。
(もっと読む)
走行方向制御装置および移動体
【課題】経路追従と障害物回避のバランスをとりながら無理なく目的地を目指す制御を行うことを課題とする。
【解決手段】自律走行制御部11は、移動体1の現在位置と通過点位置情報とから経路追従を目的とする初期目標方向θsと、障害物2までの距離がしきい値Lを超える方向の集合である第2方向集合とを決定する。目標方向決定部111は、移動体1の現在方向θcにおける障害物2までの距離がしきい値L以下の場合には、現在方向θcとの差が最小となる第2方向集合から選択された方向Ψあるいは初期目標方向θsとの差が最小となる第2方向集合から選択された方向Ψsのうち、差が小さい方を目標方向θdとして決定する。障害物2までの距離がしきい値Lを超える場合には、初期目標方向θsとの差が最小となる第2方向集合から選択された方向Ψsを目標方向θdとして決定する。
(もっと読む)
自律走行ロボットの制御システム
【課題】エレベータかごに、自律走行ロボットと一般の利用者とが同時に乗車できる安全性に優れた自律走行ロボットの制御システムを提供する。
【解決手段】エレベータ100に設置され、自律走行ロボット1のかご101内での移動を検出するロボット移動検出手段122と、エレベータ100に設置され、ロボット移動検出手段122からの移動検知信号を受けて自律走行ロボット1に対して異常信号を送信するロボット異常信号送信手段123と、自律走行ロボット1に設けられ、異常信号を受信して該自律走行ロボット1の移動を停止させるロボット異常停止手段73とを備える。エレベータ100のかご101内で自律走行ロボット1が移動すると、その移動がロボット移動検出手段122で検出されて、ロボット異常信号送信手段123から自律走行ロボット1に対して異常信号が送信され、自律走行ロボット1はロボット異常停止手段73により移動を停止する。
(もっと読む)
自己位置推定装置及び自己位置推定方法
【課題】周囲物体を特定する特徴点がロストする可能性を低減し、自己位置推定を継続的に実施可能な自己位置推定の技術の提供する。
【解決手段】移動体1に搭載した撮像装置10により撮像する画像中の特徴点を検出しつつ、移動体1の移動に伴う画像上での上記特徴点の変化から移動体周囲の物体の位置を検出することで、自己位置を推定する。このとき、上記移動体1の動作がその場回転する場合には、移動体がその場回転する前に取得した画像中に位置する特徴点の少なくとも一部を撮像可能な向きに、上記撮像方向を保持する。
(もっと読む)
自律走行ロボット、自律走行ロボットを用いた追走システム、及び追走方法
【課題】本発明は、被追走体を見失う事象が曲がり角以外の環境において生じる場合であっても、被追走体への追走を継続して行うことができるようにする。
【解決手段】本発明は、被追走体検出部37により、被追走体を見失ったか否かを判定する見失判定手段34aと、見失ったと判定したときには、見失った後の被追走体位置を推定する被追走体位置推定手段70bと、被追走体を見失う前の被追走体位置、被追走体を見失った後の被追走体推定位置及び遮視物の位置の相対的な位置関係に基づいて、その被追走体が遮視物に遮られたか否かを判定する遮視判定手段70aと、被追走体が遮視物に遮られたと判定したときには、その被追走体の被追走体推定位置を目標とした走行経路を生成する走行経路生成手段100aと、生成した上記走行経路に沿い、走行機構により移動させる走行手段110aとを有している。
(もっと読む)
案内用ロボット及びその制御方法
【課題】案内用ロボットの一部を把持している被案内者からの入力に応じて、案内用ロボットを移動させることが可能な、案内用ロボット及びその制御方法を提供する。
【解決手段】基体を移動するための駆動力を発生する移動用アクチュエータ62と、移動用アクチュエータ62の駆動を制御する移動用アクチュエータ制御手段92と、基体へ取り付けられた把持部と、被案内者による把持部への入力を検出する入力値検出手段10を備えた案内用ロボットであって、移動用アクチュエータ制御手段92は、入力値検出手段10が検出した入力に応じて基体の目標速度を算出し、この算出した目標速度で基体が移動するように、移動用アクチュエータ62の駆動を制御する。
(もっと読む)
移動体、補正値の算出方法、及びプログラム
【課題】加速度センサの出力値に生じうる誤差の影響を低減して、移動体をより高精度に制御すること。
【解決手段】倒立二輪型ロボット100は、車輪51に対して本体部50の相対位置が制御された状態で空間移動する移動体である。倒立二輪型ロボット100は、本体部50の角速度を検出するセンサ部10と、車輪51の回転方向における本体部50と車輪51との間の相対位置の変化を計測するエンコーダ部15と、センサ部10及びエンコーダ部15の各出力に基づいて予め算出された補正値に応じてセンサ部10の出力値に含まれる誤差を補正した条件で、車輪51と本体部50間の相対位置を制御するための指令を生成する指令値算出部20と、を備える。この構成を採用することによって、センサ部10の出力値の劣化によってロボット100の制御性が劣化することを抑制することができる。
(もっと読む)
移動体
【課題】地面との間で滑りが生じた場合でもより精度良く自律移動を行なうことができるようにした、移動体及び移動体システムを提供する。
【解決手段】車体2と、車体を走行させる走行装置4と、走行装置4を駆動させるアクチュエータ32と、アクチュエータ32の駆動量を検出するエンコーダ33と、車体2と車体2が走行する路面との相対速度を検出する速度センサ34と、予め設定された走行経路に沿うように、アクチュエータ32の動作を制御するコントローラ3と、を有し、コントローラ3は、エンコーダ33の検出値と速度センサ34の検出値とに基づいてアクチュエータ32への動作指令を補正する補正手段22を有して構成される。
(もっと読む)
移動体及びその制御方法
【課題】操作意図を反映させて移動させると共に、障害物との衝突を自律的に回避させて移動させる。
【解決手段】移動体は、移動装置21を用いて移動環境内を移動する。移動体は、移動環境に存在する障害物を検出する障害物検出部26と、移動環境内の所定の基準位置を原点とするグローバル座標系において、入力される操作情報に応じた通過点制御量を算出し、その通過点制御量を用いて制御される前記移動体との相対方向に沿って、自己位置から所定の距離離れた地点に通過点を設定する通過点設定部27と、設定した通過点へと到達するための移動動作を計画すると共に、障害物検出部26により進行方向前方に障害物を検出した場合には、その障害物を回避するための移動動作を自律的に計画する動作計画部23と、計画した移動動作に基づいて、移動装置21を制御する移動制御部24と、を備える。
(もっと読む)
移動体及び移動体の教示方法
【課題】教示作業を効率化するとともに、移動体の走行位置精度を向上することができるようにした、移動体及び移動体の教示方法を提供する。
【解決手段】車体1を走行させる走行装置4と、走行装置4を制御する制御装置3と、車体1の前方向を撮像する第1カメラ6と、車体1の後方向を撮像する第2カメラ7と、を有して構成し、制御装置3は、予め設定された車体の走行経路上の複数の教示地点のそれぞれにおいて、第1カメラ6及び第2カメラ7によって画像を取得し、それぞれ取得した画像を教示画像として記憶する教示画像取得部21と、第1カメラ6によりリアルタイムに撮像された撮像画像と、教示画像取得部21により予め取得された教示画像との比較結果に基づいて走行装置3を制御する走行制御部22とを有する。
(もっと読む)
無人搬送システム
【課題】搭載メモリを増やすことなく、停止位置数、分岐点数を増やすことができる無人搬送システムを提供する。
【解決手段】搬送ルート1を、2つの搬送路群1L、1Rと2つの搬送路群1L、1Rが共用する1つの共用路1cとから形成すると共に、共用路1Cから2つの搬送路群1L、1Rへ分岐する最初の分岐点B1以降において、分岐路W1L〜W25L、W1R〜W25R及び停止位置ST001〜ST050、ST101〜ST150を、2つの搬送路群1L、1R同士で互いに同じ位置関係になるように配置し、最初の分岐点B1においては、HS20からの指示により、2つの搬送路群1L、1Rのいずれか一方にAGV10を進行させ、各搬送路群1L、1Rにおいては、共に、同じ内部データを用いて、左右いずれか一方の分岐路へAGV10を進行させる。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
探索装置及び探索方法及び探索プログラム
【課題】建物のフロアの内周付近で移動できる領域を迅速に探索する。
【解決手段】台車の上に、周辺の一定領域内にある障害物を検知するセンサを載せた捜索装置において、記憶装置112は、既に探索した移動可能領域を示す屋内構造データ115を記憶する。センシング部107は、台車により移動する度に、センサにより周辺の一定領域を観測し、観測した領域内で障害物によって遮蔽された領域以外を、移動できる領域と判定し、判定結果に基づいて屋内構造データ115を更新する。探索部120は、台車に対し、移動する方向を順次指示する。探索部120は、屋内構造データ115がセンシング部107により更新されることによって屋内構造データ115で示された移動可能領域の外接四角形が拡張する方向を優先して、次に指示する方向を決定する。
(もっと読む)
自律移動装置
【課題】進行方向を長手方向とする本体形状であっても、本体周囲の障害物を適切に避けて目標物を追従できる自律移動装置を提供する。
【解決手段】レーザレンジファインダで捕捉した目標物の本体に対する相対位置情報と障害物センサで検出した周囲障害物の情報とに基づいて、本体の進行方向を、目標物の方向に障害物が検出されない場合はこの目標物の方向に決定し、障害物が検出される場合は本体を中心に放射状に広がる空間で障害物が検出されない空間のうち目標物に最も近い空間の方向に決定する。そして、決定された進行方向に本体を向けるために旋回を要するとき、その旋回領域内に障害物があるときには進行方向を直進方向に補正する。
(もっと読む)
移動体及び移動体の制御方法並びに移動体システム
【課題】教示作業にかかる労力を低減するとともに移動体を走行経路に沿って精度良く走行させることができるようにした、移動体及び移動体の制御方法並びに移動体システムを提供する。
【解決手段】予め走行経路に沿って配設されたガイドライン104を検出するガイドラインセンサ4と、車体2の進行方向を撮像するカメラ4と、車体2の駆動装置3と、駆動装置3を制御する制御装置5とを有し、制御装置5を、ガイドラインセンサ104に基づいて駆動装置3を制御する教示走行を実行する教示走行制御部7と、教示走行実行時に、複数の教示地点のそれぞれにおいてカメラ4を動作させて教示画像を取得する教示画像取得部6と、教示画像を記憶する画像記憶部9と、
教示画像と取得画像との比較結果に基づいて駆動装置を制御する再生走行制御部8とを有して構成する。
(もっと読む)
移動ロボット制御システム、経路探索方法、経路探索プログラム
【課題】インフラなどの設置を必要とせずに、自律移動ロボットを所望の走行ルールを反映させた経路に従って移動させること。
【解決手段】移動ロボット制御システムは、移動装置21を有する車両と、車両が所定の移動領域を移動する際の走行ルールが予め定められており、走行ルールに応じて所定の移動領域の経路探索コストを変化させる走行ルール情報を含む地図情報を記憶する地図情報記憶部25(15a)と、地図情報記憶部25(15a)に記憶された地図情報に基づいて、移動始点から移動終点に至る経路を探索する経路探索部23と、経路探索部23で探索した経路に基づいて、移動装置21の制御指令値を生成する移動制御部24と、を備える。
(もっと読む)
清掃ロボットの自律走行システム
【課題】予め記憶された走行経路情報を変更することなく、清掃不要エリアへの進入が未然に防止できる清掃ロボットの自律走行システムを提供する。
【解決手段】清掃ロボット10による清掃途中において、清掃ロボット10に配設した光検出センサにより予め配設された既存の照明灯による所定照度以上の光検出に基づいて清掃不要エリアAを判断し、隣接する清掃エリアにおける走行経路に変更して走行して清掃する。清掃不要エリアにおける業務等が清掃する清掃ロボットに影響されることなく、業務に支障をもたらすことがない。また、清掃不要エリアにおける人と清掃ロボット10との接触等が回避でき、安全性が向上する。
(もっと読む)
移動体の制御装置及び移動体システム
【課題】走行経路の光環境が変化しても精度よく教示された走行経路を走行できるようにした、移動体の制御装置及び移動体システムを提供する。
【解決手段】移動体1に取り付けられる撮像装置3と、移動体1を自律走行させる走行装置2とを有する移動体の制御装置であって、第1の光環境条件において取得した教示画像群と、第1の光環境条件とは異なる光環境条件において取得した示画像群と、を記憶する教示画像記憶部5と、教示画像記憶部に記憶された複数の教示画像のうち、現時点での移動体の進行方向の目標となる現教示画像を選択する教示画像選択部と、
教示画像選択部により選択された現教示画像と、撮像装置から得られた実画像とに基づいて、現教示画像と実画像との一致度が大きくなるように走行装置を制御する走行制御部と、を有している
(もっと読む)
自律走行車の走行システム
【課題】設置費用の低減及び設置作業の簡素化ができる自律走行車の走行システムを提供する。
【解決手段】第1磁石21を保持する第1ホルダと第2磁石22を保持する第2ホルダが一体形成された走行経路杭1を走行経路基準線Waと直交する状態で間隔を有して連続的に地中に埋設する。自律走行車に設けた一対の第1磁気センサ45及び第2磁気センサ46により第1磁石21及び第2磁石22の磁気検知を行い、その結果に基づいて操舵制御手段で操舵し、走行経路基準線Waに沿って走行する。そのため、埋設される走行経路杭1の間隔が比較的大きく離間して配置しても自律走行車の走行が抑制される。これにより埋設される走行経路杭1を削減でき、走行経路杭の設置費用の低減及び設置作業の簡素化が可能になる。
(もっと読む)
61 - 80 / 225
[ Back to top ]