
Fターム[5H301HH10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 駆動輪の回転差を用いた操舵 (225)
Fターム[5H301HH10]に分類される特許
41 - 60 / 225
車両の走行制御システム
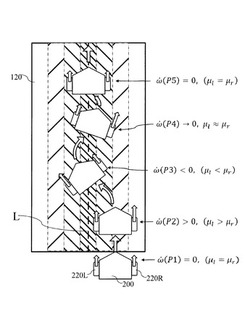
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
毛状体で移動する教材用ロボット

【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
移動型ロボット清掃機
【課題】様々なセンサを用いて、移動型ロボット清掃機の脱出状況を検出するとともに、脱出が不可能な状況であると決定された場合には、ロボットをオフにするよう設計される移動型ロボット清掃機を提供することを目的とする。
【解決手段】 任意の大きさおよび形状を有する床面を清掃する移動型ロボット清掃機であって、移動型ロボット清掃機を床面上で移動させる移動手段と、移動型ロボット清掃機の移動中に移動型ロボット清掃機が接触または近接する障害物を検出する衝突センサと、絶壁を検出する絶壁センサと、衝突センサと絶壁センサからの出力信号に基づいて、移動手段を制御するコントローラと、を備え、コントローラは、絶壁センサが所定時間を超えて絶壁を検出すると、移動手段による移動型ロボット清掃機の移動を停止することを特徴とする。
(もっと読む)
自律移動方法及び自律移動体
【課題】磁気ナビゲーションに基づいて自律移動する移動体が自己位置を見失うのを抑制する。
【解決手段】出発地から目的地まで移動体が移動する移動経路に沿って生じている磁気を予め計測して得られた環境磁気データと、移動体が前記移動経路に倣って移動する際に、移動経路に沿って生じている磁気を実測して得られる実測磁気と、を比較しながら移動体を自律移動させる方法に関する。環境磁気データは、第1の環境磁気データ群と第2の環境磁気データ群とを少なくとも含む。第1の環境磁気データ群と第2の環境磁気データ群は、移動体の移動方向と直交する幅方向に互いに間隔を空けて計測されたものである。
(もっと読む)
倒立振子型四輪走行装置
【課題】前後進及びそのままの位置で旋回、車体の方向を変えずに横方向に移動可能であり、前後進時及び横方向移動時に段差があっても十分な段差乗り越え力を備えている、倒立振子型四輪走行装置を提供する。
【解決手段】全方向車輪の第1〜第4の車輪10a〜10dを、各車輪の接地点が同一直線上に順に並ぶ配置で装置フレーム20に支持し、装置フレーム20を第1〜第4の車輪の車軸線を回転中心として揺動する倒立振子型に備え、第1の車輪と第2の車輪及び第3の車輪と第4の車輪について、平面視において一端側を近接し他端側を開き、第2の車輪と第3の車輪が、平面視において他端側を近接し一端側を開く。第1〜第4の車輪に駆動モータ15a〜15dを備え、装置フレーム20の倒れ角を検出する倒れ角センサ41の信号を入力して倒立振子型の制御モデルに基づき駆動モータを制御するコントローラ40を備えた。
(もっと読む)
倒立振子型車両の制御装置
【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の計測値θbdot_xy_sと車両1の重心速度推定値Vb_xyとから車両1に作用する床反力Fを算出し、その算出した床反力Fを発生するときに車輪体5に付与する必要があるトルクTを算出する。また、制御ユニット50は、決定した制御用操作量の目標値を規定するトルクTを推定する。そして、制御ユニット50は、これらのトルクTの差に基づいて、車輪体5の空転発生を検知する。
(もっと読む)
倒立振子型車両の制御装置
【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の測定値θbdot_xyz_sに基づいて、車両1の重心速度Vb_xy_exp1を推定すると共に、基体9の傾斜角速度の計測値θbdot_xy_sに基づいて、車両1の重心速度Vb_xy_exp2を推定する。そして、制御ユニット50は、これら推測値の差Vb_xy_difに基づいて、車輪体5の空転発生を検知する。
(もっと読む)
倒立振子型車両
【課題】床面の姿勢に応じた形態で安定に動作することができる車両を提供する。
【解決手段】本発明の車両1によれば、車両1の向きまたはその変化率を用いて、2次元床傾斜の「過去推定値」および「瞬時暫定値」のうち少なくとも一方が座標変換されることにより、2次元床傾斜の過去推定値および瞬時暫定値の座標系が一致させられる。そして、2次元床傾斜の過去推定値および瞬時暫定値を用いて、重み付き平均値またはローパスフィルタ値が算出されることにより、2次元床傾斜の新たな推定値が算出される。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
移動ロボットの位置認識のための地図生成および更新方法
本発明は、移動ロボットの位置認識のための地図生成および更新方法に関し、より詳しくは、地図生成時には抽出されたランドマークと推定されたランドマークの確率誤差に基づいて抽出されたランドマークを登録し、地図更新時には既に登録されたランドマークの正確度を算出し、正確度が低いランドマークのレベルを調整したり誤登録されたランドマークを除去したりして位置認識の誤差を最小化することができる、移動ロボットの位置認識のための地図生成および更新方法に関する。  (もっと読む)
(もっと読む)
倒立振子型移動体
【課題】重心点が移動した場合であっても、基体の姿勢を維持することができる倒立振子型移動体を提供する。
【解決手段】倒立振子型移動体は、基体2と、床面上を全方向に駆動可能な全方向移動車輪を含む複数の車輪3(4)からなる移動動作部と、複数の車輪3(4)のうち少なくとも1つの車輪を基体に対して相対移動させる相対駆動部と、基体の傾斜角度及び該傾斜角度の変化量を検出する傾斜検出部52と、傾斜角度及び傾斜角度の変化量に応じて相対駆動部に駆動指令を出力する制御部50とを備える。制御部50は、傾斜検出部が基体の傾斜を検出すると、検出した傾斜に応じて相対駆動部を駆動させることにより複数の車輪3(4)のうち少なくとも1つを基体に対して相対移動させて、複数の車輪3(4)それぞれが有する移動動作部の中心位置を結ぶ直線上に、或いは、複数の車輪それぞれが有する移動動作部の中心位置を結ぶ多角形の内側に重心点を位置させる。
(もっと読む)
倒立振子型移動体の制御装置
【課題】消費電力を抑えることができて、かつ、使用を中断した後に再開するまで時間がかかることがない倒立振子型移動体を提供する。
【解決手段】基体9と、車輪を有する移動部5と、移動駆動部31R,31Lとを有する倒立振子型移動体の制御装置において、基体の傾斜角度または傾斜角速度を検出する傾斜センサ52と、移動駆動部を制御する制御部50とを有していて、電源モードとして、通常モードと、スタンバイモードとを有していて、電源モードをスタンバイモードに移行させるためのスタンバイスイッチを有していて、制御部は、電源モードが通常モードであるときに、スタンバイスイッチがオンされた場合には、電源モードをスタンバイモードに移行させ、電源モードがスタンバイモードであるときに、傾斜センサによって検出された傾斜角度または傾斜角速度が所定の傾斜許容値を超えた場合には、電源モードを通常モードに移行させることを特徴とする。
(もっと読む)
倒立振子制御型の移動体の制御装置
【課題】走行では越えられないまでも回避するほどでもない程度の大きさの障害物が存在する場合であっても乗り越えて進行することができる倒立振子制御型の移動体の制御装置を提供する。
【解決手段】走行面を移動可能な移動動作部5と、移動動作部5を駆動する駆動力を発生させるアクチュエータ装置7と、移動動作部5及びアクチュエータ装置7が組付けられた基体9と、を有する倒立振子制御型の移動体1の制御装置であって、基体9は基体9を伸縮させる伸縮機構(直動アクチュエータ13及びバネ14)をさらに備え、移動体1を跳躍させるための指令値に基づいて、跳躍時の軌道計画を生成し、軌道計画に応じた移動体1の射出角を、アクチュエータ装置7を駆動して移動体1の姿勢を制御することにより制御する制御ユニット50と、上記の軌道計画に応じた移動体1の射出速度を、伸縮機構の伸縮量を調整することにより制御する制御ユニット10とを備える。
(もっと読む)
倒立振子型移動体
【課題】倒立振子となった姿勢で、所定の軌跡上を移動することができる全方向移動車両(倒立振子型移動体)を提供する。
【解決手段】全方向移動車両1が、基体9と、床面上を全方向に移動可能な車輪体5と、車輪体5を駆動するアクチュエータ装置7と、少なくとも基体9の傾斜角が所定の目標角度となるようにアクチュエータ装置7を制御し、かつ、車輪体5が所定の軌跡上を移動するようにアクチュエータ装置7を制御する制御ユニット50と、を備える。
(もっと読む)
無人搬送台車の進路変更装置および進路変更方法
【課題】キャスタ輪による駆動負荷の低減に好適な無人搬送台車の進路変更装置および進路変更方法を提供する。
【解決手段】交差する走行ラインの交差点で、一方の走行ライン上から交差する他方の走行ライン上若しくは無人搬送車3の向きを代えて一方の走行ライン上に、旋回させて前後の駆動ユニット4を夫々移行させる際に、前記無人搬送車3の前後の駆動ユニット4を順次、一方の走行ラインから分岐した導入ラインである導入軌道テープ15Dを経由して交差点を中心とする環状軌道である円軌道テープ15Cに沿って走行させ、前記前後の駆動ユニット4が環状軌道上の他方の走行ライン若しくは一方の走行ラインと交差する部位に到達した時点で停止させ、各駆動ユニット4を他方の走行ライン若しくは一方の走行ラインに沿うよう旋回させて無人搬送車3の進路を変更するようにした。
(もっと読む)
車両可動領域検出装置
【課題】探索対象の屋内空間に、ランドマークとみなすことが可能な特定形状の物体や図柄が無く、大量の椅子やパイプで構成された構造物のような複雑形状の物体が置いてある場合、正確な位置取得ができない。そこで、無人車両に未知の建物内部を走行させた場合に、建物内部の広さや配置物の形状によらず、自己位置を取得し地図を構築することができる装置を提供する。
【解決手段】画像データから画像の輝度変化を用いて、無人車両が走行可能な範囲である可動領域データを検出する可動領域検出手段を用いる。
(もっと読む)
環境認識装置及びそれを備えた移動体
【課題】移動体の移動可能領域を適切に検出する。
【解決手段】移動体は、構造物までの距離を計測する距離計測センサ38と、距離計測センサの3次元位置を計測するセンサ位置計測装置18a,18bを備えている。制御装置20は、距離計測センサ38の計測結果とセンサ位置計測装置18a,18bの計測結果を用いて、計測された構造物の3次元位置を算出する。そして、算出された構造物の3次元位置と尤度マップを用いて、その算出された3次元位置に対応するマップ上の計測点における構造物の情報と尤度をマップに登録又は更新すると共に、その計測点の近傍の非計測点における構造物の情報と尤度をマップに登録又は更新する。
(もっと読む)
無人走行システム
【課題】簡易な構成で、低コストで、かつメンテナンスが容易な無人走行システムを提供すること。
【解決手段】無人走行車1と複数のターゲット2とカメラ3と画像認識処理装置とを備えた無人走行システム。第1のターゲットがカメラの視野に入った状態で無人走行車の走行を開始する。第nのターゲットがカメラの視野中の左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第nのターゲットの視野中における大きさが所定の大きさとなるまで走行する。次いで、第nのターゲットの視野中における大きさが所定の大きさとなったときに視野中にある第n+1のターゲットが左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第n+1のターゲットの視野中における大きさが所定の大きさとなるまで走行する。これにより、無人走行車が所望の軌道に沿って走行する。
(もっと読む)
倒立振子型移動体及びその制御方法
【課題】目標経路上を精度良く走行することができる倒立振子型移動体を提供する。
【解決手段】 この移動体は、車輪と、車輪に支持される車体を備えており、車輪を回転駆動することで車体を倒立状態に維持しながら路面上を走行する。この移動体は、移動体の目標位置を時間の関数で表した目標軌道を用いて、車体が倒立を維持しつつ移動体の進行方向の位置を制御するための第1制御指令値を算出する手段(40,32)と、前記目標軌道と実測又は推定される移動体の進行方向の位置に関する情報とを用いて、移動体の旋回方向の角度を制御するための第2制御指令値を算出する手段(50,34)と、第1制御指令値と第2制御指令値に基づいて車輪を駆動する手段(22,24)と、を備えている。
(もっと読む)
ロボット制御装置、ロボット制御プログラムおよびロボット制御方法
【課題】ロボットの自己位置推定に関わる誤差を正確且つ効率的に調整する。
【解決手段】ロボット制御装置1は、ロボット本体の旋回開始位置から所定位置を中心にして、当該ロボット本体を旋回前後の位置が近似した位置となるように所定角度旋回させる旋回指示を検出すると、当該ロボット本体を移動させる2つの車輪の回転動作に応じて、当該ロボット本体の旋回を開始する移動制御部10と、当該ロボット本体から離間した位置にある目印を基準にして、当該ロボット本体の旋回前後に関わるロボット位置およびロボット方位を計測する計測部20と、計測した旋回前後に関わるロボット位置間の差分および旋回前後に関わるロボット方位間の差分に基づき、ロボットの車輪に関わる誤差を算出する算出部30とを備える。
(もっと読む)
41 - 60 / 225
[ Back to top ]