
Fターム[5H301KK20]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 地上設備を介して送受信するもの (35)
Fターム[5H301KK20]に分類される特許
1 - 20 / 35
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
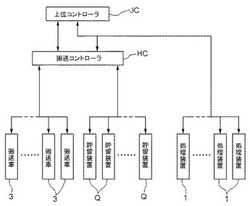
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム

【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
走行台車システム
【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、下位のコントローラだけで運用試験を行うときに自動運転を可能にする。
【解決手段】搬送車システムは、搬送車を搬送させるための搬送車システムであって、複数のストッカ(51,53,55,57)と、搬送車(44,48)と、複数のコントローラ(52,54,56,58)とを備えている。ストッカは、内部で物品を搬送可能である。搬送車は、複数のストッカ間で物品を搬送可能である。複数のコントローラは、互いに通信可能であり、複数のストッカおよび搬送車を制御する。コントローラは、搬送制御部61と、シナリオ記憶部63と、搬送指令作成部62とを有している。搬送制御部61は、搬送指令を実行することで搬送制御を行う。シナリオ記憶部63は、複数の搬送指令作成情報を含む搬送パターンシナリオを記憶する。搬送指令作成部62は、搬送指令作成情報に対応する搬送指令を作成する。
(もっと読む)
移動体の運行管理システム
【課題】外部機器との間で無線信号が干渉したり、通信している情報が外部に漏洩する等のおそれが少なく、しかも、通信のための電力消費も少ないものに抑制した状態で、通信用中継装置と移動体側の通信装置との間で無線通信を行うことが可能な移動体の運行管理システムを提供する。
【解決手段】移動経路3に沿って移動する移動体1に備えさせた移動体側の通信装置との間で無線通信を行う通信用中継装置6を、管理手段7との間で管理情報を通信自在に通信線8により接続された中継装置本体12と、中継装置本体12に接続線13にて接続され、移動体側の通信装置との間で管理情報を無線信号にて通信するアンテナ部14とを備えて構成し、アンテナ部14を、長尺状でかつ横断面形状が平板状のシート状に形成され且つ厚さ方向に沿う通信可能領域を表面全体に形成するシート状アンテナ14Aにて構成されて、移動経路3に沿う状態で設置する。
(もっと読む)
移動体の運行管理システム
【課題】無線信号が干渉する等のおそれが少ない状態で、移動体との間での無線通信を行うことを可能にしながら、移動体が走行区間の境界に至ったときに、通信対象である通信用中継装置を切り換えることを適正に行えるようにする。
【解決手段】複数の走行区間毎に無線通信を行う複数の通信用中継装置6のアンテナ部14が、無線信号を二次元方向に伝播して、無線通信可能な通信領域を表面に沿って形成する状態で出力させるシート状のアンテナ本体部15と、接続線13が接続される接続部16とを備えて構成され、アンテナ本体部15が、経路長手方向に沿って長尺状に形成され、且つ、互いに隣接する状態で経路長手方向に沿って並ぶ状態で設置され、移動体1が境界を通過する通過タイミングに至ったときに切り換え判別用条件が満たされたことが判別されるように、アンテナ本体部15における接続部16の接続位置が設定される。
(もっと読む)
移動体システム及びそのデッドロック回復手法
【課題】 デッドロックからの総回復時間を最小とできるように改良した移動体システム及びそのデッドロック回復手法を提供することを目的とする。
【解決手段】 移動体を離散時間で管理する移動体システムにおいて、移動体が相互に前方の区間を塞ぎ合うことにより閉路が存在するときにデッドロックが発生したと判定し、デッドロックが発生したと判定された場合には、例外処理として、閉路を構成する移動体のいずれかを本来の走行方向とは逆向きに走行経路上を走行させる回復動作を行うに際し、閉路からの退避路候補について4つの関係を与え、回復動作の干渉を考慮する必要がある同一のデッドロック群に属するデッドロックについては、右方最短退避路、右方次最短退避路、左方最短退避路及び左方次最短退避路から選択された退避路の組み合わせに従って前記回復動作を実行するので、デッドロックからの総回復時間を最小化することができる。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、荷物保管場所の間隔を狭くすることで荷物保管場所の数を増やしつつも、待機状態になる搬送車の数を少なくする。
【解決手段】搬送車システム1において、第1通常ライン11aおよび第1バイパスライン12aは並んで配置されている。複数の搬送車3は、第1通常ライン11aおよび第1バイパスライン12aを別々に走行する。第1バッファ17Aおよび第2バッファ17Bは、第1通常ライン11aおよび第1バイパスライン12aの間に並んで設けられている。搬送車コントローラ27は、搬送車3を制御可能である。搬送車コントローラ27は、走行方向に隣り合う第1バッファ17Aおよび第2バッファ17Bへの搬送指令を、第1通常ライン11aおよび第1バイパスライン12aに分かれて走行するように第1搬送車3aおよび第2搬送車3bに割り付ける。
(もっと読む)
台車のモニタリングシステムとモニタリング方法
【構成】 複数の台車の位置を走行ルートのレイアウトと共にモニタに表示し、モニタ上で台車を指定し、指定された台車の出発位置と目的位置とをレイアウト上に表示する。
【効果】 台車の走行ルートが妥当かどうかを、容易に確認できる。
(もっと読む)
無人搬送車の走行制御方法
【課題】交差点を備え、複数のゾーンに分割された走行経路に沿って走行する無人搬送車の交差点の手前での渋滞が緩和されると共に、各ゾーンのうち、ある特定のゾーンへの無人搬送車の集中を回避することのできる無人搬送車の走行制御方法を提供する。
【解決手段】複数の無人搬送車1に対する走行経路2の交差点3内への進入優先度を、各無人搬送車1の進行方向で交差点3を超えた各ゾーンA〜D内の無人搬送車1の台数により決定するので、交差点3の手前での渋滞が緩和されると共に、各ゾーンA〜Dのうち、ある特定のゾーンへの無人搬送車1の集中を回避することができる。
(もっと読む)
無人搬送台車の制御装置、その制御システム及びその制御方法、並びに、プログラム
【課題】無人搬送台車を用いた搬送を効率的に行うことができるようにする。
【解決手段】障害物を検知する障害物センサを具備する無人搬送台車(AGV)120が走行路を走行する際に、当該無人搬送台車(AGV)120の動作を制御する制御装置100において、搬送を行う前に、無人搬送台車(AGV)120に走行路を走行させて当該走行路の各地点において無人搬送台車(AGV)120と通信を行って、走行路の各地点間の走行区間ごとに、障害物センサのオン/オフに係る検知状態の情報を取得する。そして、実際の搬送を行う際に、制御装置100は、無人搬送台車(AGV)120に対して、搬送を行う前に取得した障害物センサのオン/オフに係る検知状態の情報に基づいて、障害物センサがオンとなる走行区間については障害物センサの検知に基づく動作を不能とする制御を行う。
(もっと読む)
搬送車システム
【課題】搬送効率を維持しながら安全を確保することが可能な搬送車システムを提供する。
【解決手段】本発明に係る搬送車システムは、物体を検出するライトカーテン30A〜30Fをクレーン10の走行経路20周辺に設けた搬送車システムであって、ライトカーテン30A〜30Fの物体を検出したという検出結果を受信したとき、クレーン10の速度を制御する制御手段と、ライトカーテン30A〜30Fとクレーン10との間の距離に応じて、ライトカーテン30A〜30Fの検出結果を前記制御手段に送信するか否かを判定する判定手段とを備える。
(もっと読む)
ロボット制御プログラム及びロボット制御装置
【課題】ロボットを効率的に巡回させることのできるロボット制御プログラム及びロボット制御装置の提供を目的とする。
【解決手段】コンピュータに、巡回経路を巡回するロボットより受信される、前記ロボットによって検知された障害物の配置期限を識別するための配置期限識別情報を記憶手段に記録する記録手順と、前記配置期限識別情報によって判定される配置期限に基づいて前記巡回経路における障害物の有無を判定し、障害物が有ると判定されるときに前記巡回経路と異なる経路を巡回経路として判断する経路判断手順と、前記経路判断手順において判断された巡回経路による巡回をロボットに指示する巡回指示手順とを実行させることにより上記課題を解決する。
(もっと読む)
認識/推論の水準に応じた階層的構造の室内情報を有する移動サービスロボットの中央情報処理システム及び方法
【課題】一般に、室内環境において移動サービスロボットは、通常の動作のである認識、走行、操作など基本的な機能以外にも自己位置の認識及びマップの生成、セルフモデリング、物等を分類して認識するなどの作業も遂行可能でなければならない。現在、このような移動サービスロボットの各機能について個別の研究が活発に進められている。しかしながら、多種多様な複数の移動サービスロボットを同一環境で動作させるためには移動サービスロボットが必要とする情報を統合して管理し、共有するための体系に関する研究が必要である。
【解決手段】そこで本発明では、室内の移動サービスロボットに必要な室内情報を提供し、移動サービスロボットから変化した情報の提供を受けることで、室内の多数の移動サービスロボットが室内情報を共有できるように室内の空間及び物体に関する情報を統合管理する移動サービスロボットの中央情報処理システム及び方法を提供する。
(もっと読む)
自走式ロボット制御システム
【課題】複数個の自走式ロボットを用いたサッカー競技において、登場する自走式ロボットの入れ替えが容易で、即座に控えの自走式ロボットとの交換ができる自走式ロボット制御システムを提供すること。
【解決手段】表面側に各自走式ロボットを個別認識するためのマークと、裏面側に当該マークに対応した個体認識情報を設定するための情報設定手段を有するID識別ユニットを自走式ロボットに装着する。互換性のある複数個の自走式ロボットに個別認識するための異なるマークとIDを容易に付与することができる。
(もっと読む)
自走式装置及び自走式掃除機
【課題】1台で、ペット等の対象物の状態をユーザに確実に知らせることができる自走式装置及び自走式掃除機を提供する。
【解決手段】自走式掃除機1のおいて、所定の対象物に取り付けたICタグから識別情報等を読み取るICタグ読取部131と、ICタグ読取部131により読み取られた識別情報等を含む監視情報を、ユーザ所有の携帯電話機に送信する通信部134と、を備えるよう構成した。
(もっと読む)
無人ヘリコプタによるパイロットロープの延線方法
【課題】パイロットロープの延線を円滑かつ安全に行うことができるようにする。
【解決手段】パイロットロープ3が延線されるn本の高圧線鉄塔2について、k番目(k=2,3,・・・,n)の高圧線鉄塔2の上空に、その一端がk−1番目の高圧線鉄塔に固定されているパイロットロープ3の他端を繋いだ、地上局5から無線送信されてくる位置目標値に従ってGPSを利用した自律航行が可能な無人飛行体10を、k番目の高圧線鉄塔2にパイロットロープが掛かるように通過させ、無人飛行体10がk番目の高圧線鉄塔2を通過する際に、パイロットロープ3をk番目の高圧線鉄塔2に固定するとともに、k番目の高圧線鉄塔2に固定されている別のパイロットロープ3に繋ぎ直すことにより、高圧線鉄塔2に順にパイロットロープ3を延線していくようにする。
(もっと読む)
搬送制御装置及び搬送制御プログラム、並びに搬送制御方法
【課題】搬送システム内の装置の稼働率を向上させ、搬送システム全体の効率を向上させる。
【解決手段】搬送制御装置1では、搬送要求受信部2で受信した搬送システムのあるステーションからの搬送要求に基づき、台車選定部4で、搬送台車の状態を参照して、搬送要求受信部2で搬送要求を受信したステーションより搬送台車走行方向上流側にあり、且つ、基準点設定部3で設定した搬送要求受信部2で搬送要求を受信したステーションより搬送台車走行方向上流側に第一の距離だけ離れた位置である基準点から最短距離に位置する空の搬送台車を搬送要求受信部2で搬送要求を受信したステーションに配車する搬送台車として選定する。そして、搬送命令送信部5で選定した搬送台車に対して搬送命令を行う。
(もっと読む)
1 - 20 / 35
[ Back to top ]