
Fターム[5H301MM09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 異常・故障検出、安全装置、試験、検査 (525) | 対象自身で所定の処理を行うもの (130)
Fターム[5H301MM09]に分類される特許
1 - 20 / 130
ロボット掃除機及びその制御方法
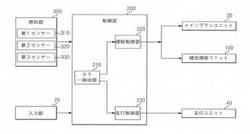
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体

【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
車両用遠隔操作装置
【課題】操作者にとって煩わしくなく、且つ、安全に車両の遠隔操作が可能な遠隔操作装置を提供する。
【解決手段】車両用遠隔操作装置100は、ユーザが所持するリモコン3から送信されるトリガ信号及び強度確認用信号を受信する受信部と、トリガ信号の受信に伴い、車両1を自動走行させる車両制御部と、受信された強度確認用信号の電波強度が予め設定された規定値以下であるか否かを判定する電波強度判定部と、強度確認用信号の電波強度が、規定値以下である場合に車両制御部に車両1の自動走行を禁止させる禁止部と、を備える。
(もっと読む)
ロボット
【課題】人間との生活空間で使用出来るよう、設備の構造が極めて簡単であり、製造コストを極めて安価にすることが出来、障害物の存在する空間においても転倒することなく当該障害物を傷つけずに乗り越えることが出来るロボットを提供する。
【解決手段】ロボットに移動するための推進力を付与する推進力発生手段と、当該ロボットに浮揚力を付与する浮揚力発生手段とを備えることを特徴とし、当該浮揚力発生手段は、当該ロボットに働く重力をMg、当該浮揚力発生手段により発生される浮揚力をFとした場合に、Mg≧Fの関係を満足するよう設定されるロボットを採用する。
(もっと読む)
搬送台車及び搬送台車システム
【課題】
搬送台車を安全に移動できるようにする。
【構成】
搬送台車は走行車輪を走行モータにより駆動すると共に、ブレーキによりロックし、搬送台車の前面の下端近傍もしくは後面の下端近傍に設けられ、押し棒が搬送台車に当接もしくは近接していることを検出すると、検出信号を出力する押し棒センサと、検出信号がオンするとブレーキのロックを解除すると共に、検出信号がオフするとブレーキをロックする制御部、とを備えている。
(もっと読む)
移動体および移動体の制御方法
【課題】センサの傾きに因む計測誤りの影響を低減して、より正確な位置姿勢推定が行える、移動体および移動体の制御方法を提供する。
【解決手段】移動体の周囲の環境を計測し、そのセンサデータと予め保持する地図データとを比較することにより移動体の前記地図データ上での位置と姿勢を推定し、その推定結果に基づいて目的地に移動する移動体において、前記距離センサの距離データを環境の幾何形状データに変換する距離センサ制御部と、計測点のセンサからの距離に応じて、前記距離センサ制御部で得られた幾何形状データと地図データのマッチング対象のサイズを設定する距離センサ誤差低減部と、前記距離センサ誤差低減部で設定されたマッチング対象のサイズで幾何形状データと地図データをマッチング処理し移動体の位置と姿勢を推定する位置姿勢推定部を備えたことを特徴とする。
(もっと読む)
移動体
【課題】異常の発生に伴って電源が切られるなどして通常でない状態に陥ったロボットが、作業が可能な状態になるまでには、コントローラのOSの起動待ちや各種データの読み込み、センサや移動機構の動作確認などの準備が必要であり、多くの時間を要する。本発明ではこれらの準備に要する時間を短縮し、ロボットの作業可能な状態への復帰の迅速化を課題とする。
【解決手段】ロボットが再起動される際に、コントローラやセンサの状態を判定し、異常な状態にないコントローラやセンサは再起動しないようにして、再起動するデバイスを可能な限り減らすことで起動に要する時間を短縮する。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
台車走行制御システム
【課題】軌道上を自走する台車の走行の安全性を高める。
【解決手段】台車1が走行する軌道2に沿って被検出体(センサ金具11a〜11d)を配置し、当該被検出体を検出するセンサ(磁気検出センサ12a〜12d)を台車1に設けた。そして、台車1の停車中にセンサにより被検出体が検出されない場合には、台車1の発車を禁止するようにした。また、台車1の走行中にセンサにより被検出体が検出されなくなった場合には、台車1を制動(減速や停止)させるようにした。
(もっと読む)
自律移動装置及び自律移動制御方法
【課題】 目標物の捕捉が中断された場合であっても、確実に特定の目標物の追従を再開することができるようにする。
【解決手段】 移動する目標物に追従して自律的に移動する自律移動装置において、第1の認証情報を入力する第1の入力手段と、第1の認証情報を記録する認証情報記録手段と、目標物を捕捉する捕捉手段と、捕捉された目標物に追従するように走行させ、捕捉手段による目標物の捕捉が不能となった場合に停止させる走行制御手段と、目標物の捕捉が不能となった場合に、第2の認証情報を入力する第2の入力手段と、第2の認証情報と認証情報記録手段により記録された第1の認証情報とが一致するかを照合する照合手段とを具備し、走行制御手段は、照合手段により第2の認証情報と第1の認証情報とが一致すると照合された場合に、再度、捕捉手段により捕捉された目標物に追従するように走行させる。
(もっと読む)
経路情報修正装置、軌道計画装置、及びロボット
【課題】障害物と干渉するノードを含まない非干渉経路の算出確率を高めること。
【解決手段】軌道計画装置100は、エッジを介したノード間の接続により構成される経路情報を修正する。軌道計画装置100は、環境情報に基づいて経路情報に含まれるノードの干渉性を判定する干渉判定部42と、干渉判定部42により干渉有りと判定されたノードの周囲に追加ノードを生成する追加ノード生成部70と、干渉判定部42による追加ノードの干渉性の判定結果に応じて、干渉有りと判定されたノードを追加ノードに置き換えるノード置換実行部44と、を備える。
(もっと読む)
航空機の制御システム、航空機、航空機の制御プログラム、及び航空機の制御方法
【課題】舵面の舵角を制御することによって飛行を制御する制御則から、舵面の舵角及びエンジン推力を制御することによって飛行を制御する制御則への切り替えを適切に行うことを目的とする。
【解決手段】航空機1の制御システム6は、舵面3の舵角を制御することによって飛行を制御する飛行制御則20、舵面3の舵角及びエンジン推力を制御することによって飛行を制御する舵面・推力統合飛行制御則22の何れかで飛行を制御するコンピュータ15と、舵面3の少なくとも1つが機能不良であることを検出する舵面故障損傷検出装置18を備え、舵面3の機能不良が検出された場合に、該検出結果に基づいて、所望の飛行特性を実現するために要する舵面3の舵角及び舵角の変化率を算出し、算出した舵角又は舵角の変化率が変化可能な範囲を超えているか否かを判定することによって、飛行制御則20から舵面・推力統合飛行制御則22への切り替えの要否を判定する。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム
【課題】移動体の移動経路を最適に設定すること。
【解決手段】移動体マップ装置10は、複数の小領域2aに分割された地図情報2を記憶する第1記憶手段と、移動体1の現在位置を検出する位置検出手段と、位置検出手段により検出された移動体1の現在位置に応じて、第1記憶手段の地図情報2の中から所定領域5を読み出す読出手段と、読出手段により第1記憶手段の地図情報2から読み出された所定領域5を一時的に記憶する第2記憶手段と、地図情報2における移動体1の初期位置から目標位置まで移動経路を、隣接する各小領域2aのサブゴール2bを夫々接続して設定する経路設定手段と、を備える。経路設定手段は、第2記憶手段の所定領域5内において、現在位置近傍のサブゴール2bと目標位置に近い側のサブゴール2bと、の距離を短縮するように、各小領域2aのサブゴール2bを夫々再接続し経路を変更する。
(もっと読む)
移動装置、移動装置の制御方法及びプログラム
【課題】推測航法から誘導方式へスムーズに切り替えることができる移動装置、移動装置の制御方法及びプログラムを提供する。
【解決手段】誘導線に対する位置偏差を検出する検出手段と、推測航法に係る仮想誘導線に対する位置偏差を算出する算出手段とを備え、前記検出手段が検出した位置偏差又は前記算出手段が算出した位置偏差に基づいて、移動に係る制御量を算出する移動装置において、前記検出手段が検出した位置偏差及び前記算出手段が算出した位置偏差を結合する結合手段と、該結合手段が結合した位置偏差に基づいて、移動に係る制御量を算出する手段とを備える。
(もっと読む)
自走式装置の位置の決定方法
【課題】電動駆動走行車(3)を有する自走式装置(1)の位置の決定方法を提供する。
【解決手段】装置(1)が障害物検出装置(A)を備え、さらに占有された予め計算された装置(1)の最初の位置からの多数の可能な位置および方位(パーティクル(小部分)6)が計算され、および装置(1)に対応した走行後の次に占有される第2の位置に関して、光学ユニットの測定結果に基づき確率を考慮した所定の選択アルゴリズムに従って、予め発生されたパーティクル(6)の1つが装置(1)の新たな位置として占有される自走式装置(1)の位置の決定方法である。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】屈曲部を過ぎた後の姿勢修正を早期に終了させることができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2Aは、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車1Aの走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号をそれぞれ出力する前部ガイドセンサ3aおよび後部ガイドセンサ3bと、現在位置を特定する位置特定手段4a、4b、10と、位置に対応した前部ガイドセンサ用の目標センサ出力値と後部ガイドセンサ用の目標センサ出力値とが予め格納された記憶部11と、記憶部11を参照して現在位置に対応する目標センサ出力値を取得し、各ガイドセンサ3a、3bから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
自律走行制御装置及びそれを備えた自律走行車両
【課題】路面に基準線が描かれていない道路でも形状を認識し、更に、認識した道路形状を用いて適切な車両の走行経路を設定すること。
【解決手段】自律走行可能な車両に搭載され、該車両の自律走行を支援する自律走行制御装置であって、高低差が所定値以上の位置を検出し、検出した位置に基づいて道路形状を認識する道路形状認識部と、道路形状認識部によって認識された道路形状を用いて走行経路を設定する走行経路設定部12とを備え、走行経路設定部12は、道路形状認識部によって認識された道路の両端の間に複数の走行経路候補を設定する候補設定部31と、複数の走行経路候補の各々について、路面の凹凸、路面の斜度、経路の曲率、及び経路の曲率変化のうち、少なくともいずれか一つに基づいてスコアを作成するスコア作成部32と、スコア作成部32によって作成されたスコアに基づいて、複数の走行経路候補の一つを走行経路として特定する経路決定部33とを具備する自律走行制御装置を提供する。
(もっと読む)
技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォーム
【課題】技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォームであって、少なくとも、駆動手段と、検査手段と、位置データを求めるための手段と、通信手段とを備えているものを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供する。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
(もっと読む)
地図生成装置、地図生成方法、移動体の移動方法、及びロボット装置
【課題】たくさんの人が存在する混雑な環境下で地図構築を行う。
【解決手段】ロボットが移動する間に連続して撮影した連続画像を取得する連続画像取得部11と、連続画像から各特徴点における局所特徴量を抽出する局所特徴量抽出部12と、局所特徴量抽出部12により抽出した局所特徴量について、連続する入力画像間でマッチングをとる特徴量マッチング13と、特徴量マッチング部13により所定数連続する画像間でマッチングが取れた局所特徴量の平均を不変特徴量として求める不変特徴量算出部14と、連続画像を取得した各時刻におけるロボットの位置に基づき各不変特徴量に対応する距離情報を算出する距離情報取得部15と、当該不変特徴量及び距離情報を有するハイブリッド地図として、局所メトリカル地図を生成する地図生成部16とを有する。
(もっと読む)
1 - 20 / 130
[ Back to top ]