
Fターム[5H301QQ04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 特殊な動作をする移動体 (317) | 移動体上の電源の充電、交換をするもの (153)
Fターム[5H301QQ04]に分類される特許
81 - 100 / 153
無人搬送車の二次電池監視装置

【課題】無人搬送車2の動作状態に応じて、各動作状態に対応して予め設定しておいた放電電流値等を積算することにより、高価な電流検出器やA/D変換器を用いることなく、放電容量(残存容量)を検出することができる無人搬送車の二次電池監視装置を提供する。
【解決手段】二次電池3を電源として無軌道上又は軌道上を走行することにより積荷を搬送する無人搬送車2において、この無人搬送車2の動作状態を検出する動作状態検出手段と、一定時間ごとに、この動作状態検出手段が検出した動作状態に対応して予め定められた放電電流値を積算することにより放電容量を算出する放電容量積算手段とを備えた構成とする。
(もっと読む)
自走式移動体のシステム

【課題】自走式移動体本体と充電台とが確実に接続されて充電が行われる自走式移動体のシステムを提供する。
【解決手段】自走式移動体のシステム100は、制御部116と充電池115とを有し、充電池115からの電力供給によって駆動される自走式移動体本体110と、充電池115を充電するための充電台120と、自走式移動体本体110を充電台120に誘導して自走式移動体本体110を充電台120に接続するための誘導制御手段を備え、誘導制御手段は、充電台120に配置される発光ダイオード122と、自走式移動体本体110に配置される測距センサ113とを含み、測距センサ113は、発光ダイオード122から発射された光を検出して制御部116に信号を送信し、制御部116が信号を受信して充電台120の方向と位置とを認識する。
(もっと読む)
航走体の安定ロバスト制御装置、安定ロバスト制御システム、その方法およびプログラム
【課題】舵駆動源が故障し、かつ、正常に動作する舵駆動源が残っている場合においても、水中航走体の姿勢を安定に保つことのできる安定ロバスト制御装置を提供する。
【解決手段】安定ロバスト制御装置10は、舵駆動源7の故障を検知する故障検知手段11と、水中航走体1の姿勢に関する情報を検知するセンサ8にて検出した検出値と目標値との偏差を算出する偏差算出手段14と、水中航走体1の姿勢制御用パラメータとして、偏差に基づいて水中航走体1に付与する制御力および制御モーメントを算出する自動制御パラメータ算出手段15と、制御力および制御モーメントを、配分則に基づいて、各舵駆動源7に対して配分する配分量を算出すると共に、舵駆動源7の故障が検知された場合に、制御力および制御モーメントを、故障が検知された舵駆動源7を除く残りの舵駆動源7に対して再配分する配分量算出手段16とを備える。
(もっと読む)
自走式機器およびそのプログラム
【課題】自走式機器が同じと0ころばかり走行せずに、走行空間全体を移動することができる、地図を必要としない自走式機器を提供することを目的とする。
【解決手段】機器本体100の移動手段103と、機器本体の走行をコントロールするコントロール手段101と、電力を供給する電池104と、障害物を検出する障害物検出手段102と、機器本体の移動軌跡の重心位置を算出する重心位置算出手段105とを備え、コントロール手段101は、機器本体の移動軌跡の平均重心位置を中心とした走行到達方向毎の値をカウントすることで次の走行方向を決めるようにした。これによって、例えば、走行到達方向毎のカウントの少ない方向を次の走行方向として決めることで、走行空間の形状や障害物にかかわらず、走行空間の地図を作成することなく走行空間全体を隈無く走行することができる。
(もっと読む)
自走式装置充電システム
【課題】自走式装置と、当該自走式装置に充電のための電力を供給する充電装置と、を備える自走式装置充電システムにおいて、より簡易且つより低コストな構成で、確実に自走式装置を充電装置まで自律走行させる。
【解決手段】セキュリティロボット4に、第1光ビームセンサ452aが、側面全周に沿って所定間隔で複数配置されるとともに、第2光ビームセンサ452bが、セキュリティロボット4の進行方向を向くよう配置された検出部45を備え、予め設定されたセキュリティロボット4の充電タイミングになったと判断された場合に、第2光ビームセンサ452bと、第2光ビームセンサ452bの左右に配置された2つの第1光ビームセンサ452a,452aのうち少なくとも1つの第1光ビームセンサ452aと、により充電装置2の発光部22により発光された光ビームMが検出されるように、セキュリティロボット4を回転させるよう構成した。
(もっと読む)
自走式装置充電システム
【課題】自走式装置と、当該自走式装置に充電のための電力を供給する充電装置と、を備える自走式装置充電システムにおいて、より簡易且つより低コストな構成で、より正確に自走式装置を充電装置まで自律走行させる。
【解決手段】セキュリティロボット4Bは、充電装置2の発光部22により発光された赤外光ビームMを受光して検出する光ビームセンサ452を側面全周に沿って所定間隔で複数配置した検出部45Bと、赤外光ビームMを検出した光ビームセンサ452の方向に、セキュリティロボット4の進行方向に向いた隣り合う2つの光ビームセンサ452,452から等間隔の位置方向Q1と、セキュリティロボット4Bの進行方向と、が向くように制御して、本体部40Aを回転させる第1回転制御プログラムを実行したCPUと、を備えるよう構成した。
(もっと読む)
目標物判別システム、目標物判別方法および目標物判別制御プログラム
【課題】目標物までの距離や方向を簡易に判別可能な目標物判別システム、目標物判別方法および目標物判別制御プログラムを得る。
【解決手段】目標物には上発光体221、左発光体224および右発光体225が三角形の頂角の3点のように配置されている(A)。ロボットは目標物に対して左右にずれた位置にいると左発光体224と右発光体225の間隔が縮まる(B)。どちら側にいるかは更に左右に位置をずらせば分かる(C、D)。また、目標物に対する距離は、たとえば三角形の大きさや面積、辺の長さにより求めることができる。
(もっと読む)
自走式装置充電システム
【課題】自走式装置と、当該自走式装置に充電のための電力を供給する充電装置と、を備える自走式装置充電システムにおいて、より簡易且つより低コストな構成で、正確に自走式装置を充電装置まで自律走行させる。
【解決手段】自走式掃除機4と、充電装置2と、を備える自走式装置充電システム1において、自走式掃除機4は、充電装置2の発光部22により発光された赤外光ビームMを受光して検出する光ビームセンサ452を側面全周に沿って所定間隔で複数配置した検出部45と、赤外光ビームMを検出した光ビームセンサ452の方向に、自走式掃除機4の進行方向が向くように制御して、自走式掃除機4を回転させる回転制御プログラムを実行したCPUと、を備えるよう構成した。
(もっと読む)
自走式機器およびそのプログラム
【課題】マップ情報の精度が低い場合や誤差にあまり影響を受けずに、広い走行空間であっても少ない計算量でくまなく走行することができる自走式機器を提供する。
【解決手段】機器本体100の移動手段103と、走行のコントロール手段101aと、電池105と、障害物検出手段102と、機器本体が到達していない領域を検出する未到達領域検出手段101bとを備え、障害物検出手段102の情報を利用して走行しながら、未到達領域検出手段101bによって走行位置付近の移動可能な未到達領域を検出し、未到達領域まで移動して機器本体の移動可能な空間をくまなく走行する。これによって、例えば、地図に誤差が含まれていた場合でもあまり影響を受けずに、また、例えば、広い空間であっても走行位置付近の移動可能な未到達領域のみを検索するために、少ない計算量で、機器本体の移動可能な空間をくまなく走行可能である。
(もっと読む)
ロボットシステム
【課題】所望する目的のロボット動作を安定して得られ、しかもロボットの小型軽量化とコスト低減を図ることができるロボットシステムを提供する。
【解決手段】巡回路に沿って走行される警備ロボット10の電源として充電式電池21を使用し、また、巡回路11の途中に複数の充電ステーション13a〜13cを配置し、これら充電ステーション13b〜13cに警備ロボット10が達するごとに、それぞれの充電部31により前記充電式電池21を満充電まで充電し巡回警備のための走行を継続させるようにした。また、組み込まれる充電式電池21として10C以上の電流で急速充電できるリチウムイオン二次電池が用いられことも特徴とする。
(もっと読む)
移動式装置用充電器及び高さ調節機構
【課題】好適に高さ調節することができる移動式装置用充電器及び高さ調節機構を実現する。
【解決手段】充電器100の高さ調節機構90を筐体12と脚部20とスライド部30とによって構成し、脚部20の支柱部22に上下方向に沿って複数形成されている前係合部23aと後係合部23bの何れかを、スライド部30の前係止部35と後係止部36がそれぞれ係止し、そのスライド部30の前係止部35と後係止部36が係止した支柱部22の前係合部23aと後係合部23bの高さ位置に対応させて、脚部20の配置を支柱部22の延在する方向に切り替えることで、筐体12から脚部20が出没する長さを切り替えて、その筐体12から脚部20が延び出した長さに応じて、筐体12の床面からの高さを好適に調節することを可能にした。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
 (もっと読む)
(もっと読む)
雪降ロボット
【課題】普通の建物の屋根で、簡単かつ容易に、しかも便利に能率よく使用して安全に雪降ろしする。
【解決手段】雪降ロボットは、建物70の屋根71を自走する雪降ロボットであって、自走して屋根71から雪降ろしする範囲を検出する位置センサ6を備えており、この位置センサ6で屋根71の雪降ろし位置を検出しながら、特定された範囲に自走して屋根71から雪降ろしする。
【効果】建物の屋根の上を無人で走行して、自動的に雪を処理するので、従来では危険が伴った屋根の雪降ろし作業を、高齢者や弱者であっても安全かつ効率よく行うことができる。さらに、降雪時や夜等の作業環境が悪い時でも、屋内に居ながらにして雪降ロボットを運転させて雪降ろしできる。
(もっと読む)
自律走行移動体の制御システム
【課題】距離測定用のセンサー信号とビーコン信号との間で干渉が生じても、センサーによる距離測定において誤りが生じるのを防止することが可能な自律走行移動体の制御システムを提供する。
【解決手段】自律走行移動体1の制御システムは、自律走行移動体1に設けられ、対向する物体との間の距離を計測するために赤外線ビームS1〜S5を発する受発光ユニット140を備える。受発光ユニット140は、赤外線ビームを第1の時間間隔Tsで各々が順次、発する5つの発光部14a〜14eと、受光部14fとを含む。赤外線ビーコン発光ユニット211、212は、充電ターミナル2に設けられ、自律走行移動体1に自己の位置の基点を指示するために第2の時間間隔Tbで赤外線ビームBを発する。自律走行移動体1の走行時にて第1の時間間隔Tsが第2の時間間隔Tbより短い。
(もっと読む)
自走式掃除機
【課題】障害物のある室内を好適に走行して掃除することができる自走式掃除機を実現する。
【解決手段】自走式掃除機100が、居室R内の床面F上を自律走行して掃除を行う際に、超音波センサ25が検知した自走式掃除機100の移動方向前方の障害物を含む壁面を基準壁Wとして認識するとともに、その基準壁Wに向かって右に方向転換を行い、その基準壁Wに沿った一方向を新たな移動方向として移動する。そして、自走式掃除機100は、検知した障害物に対応付けた基準壁Wを避けるように方向転換を行うとともに、その基準壁Wに沿ったジグザグ走行を行うようにして、その基準壁Wに沿った領域を隈無く走行することを繰り返して、床面Fの掃除を行うこととした。
(もっと読む)
掃除ロボット
【課題】広い範囲の掃除を効率的に行うことが可能な自動掃除システムを提供する。
【解決手段】充電器;および
走行手段と、この走行手段を駆動する自走用モータと、走行面を掃除する掃除手段と、この掃除手段を駆動する吸引用モータと、前記自走用モータおよび吸引用モータに電力を供給する20C,3分間以内で80%電池容量の充電が可能なリチウムイオン二次電池と、この二次電池の残存容量を検出する検出手段と、前記走行手段による走行経路を制御すると共に前記検出手段で検出された前記二次電池の残存容量が所定の閾値以下になったときに前記充電器に戻るように前記走行手段を制御する機能を有する制御手段とを備える掃除ロボット;
を具備したことを特徴とする自動掃除システム。
(もっと読む)
飼料移動用無人自律走行車
独立した駆動手段によって独立して駆動可能な二つの車輪(4’、5’)と、車両から壁までの距離を測定する距離測定装置(6)と、壁に対する車両のセンターライン(14)の方向を測定する方向測定装置(9)と、車輪間のトルク差を調整するトルク差調整装置(10)と、車両を制御して進行方向へ移動させる制御ユニット(11)と、略横方向に飼料を移動する飼料移動手段(12)とからなる無人自律走行車であって、前記制御ユニット(11)が、走行中車両が距離測定装置によって測定された壁までの距離を維持し、この距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、車両のセンターライン(14)が前記方向測定装置(9)が測定した、少なくとも予備調整した方向とほとんど等しい、壁に対する方向を維持するようにプログラミングされ、前記制御ユニット(11)が、走行中、駆動可能な前記車輪(4’、5’)が前記トルク差調整装置(10)の測定したトルク差を示し、トルクは予備調整された最大トルク以下となっているようにプログラミングされていることを特徴とする無人自律走行車。 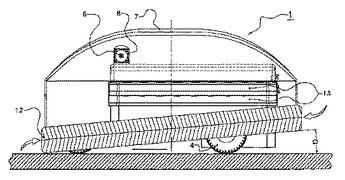 (もっと読む)
(もっと読む)
ドッキングシステム
【課題】予め軌道やステーション以外の構造物を利用せずにドッキングが可能で、かつドッキング終了後に自走式ロボットの自己位置を補正する。
【解決手段】円弧状に配置された発光素子から発生される光の軸が円弧の曲率中心を通るように構成された発光部32と、ドッキングするための第1接続端子34と、を備えているステーション30と、円弧と同じ曲率半径の円弧部を有する本体部と、この本体部を移動させる移動機構15と、前記ステーションの位置と地図情報とに基づいて移動経路を生成して前記ステーションの近傍領域まで自走するように制御する第1制御部20と、発光部からの光信号を受光する受光部11と、光信号の方向を検出する方向検出部13と、方向検出部によって検出された方向に本体部を移動させるように制御する第2制御部14と、ドッキングするための第2接続端子24と、を備えている自走式ロボット10と、を備えている。
(もっと読む)
自走式機器システムおよびそのプログラム
【課題】発電装置が発電した電力を効率よく使用することができる自走式機器システムを提供することを目的とする。
【解決手段】商用電源と発電装置との連系点に設置された逆電力量検出装置201と、自走式機器101とを有し、逆電力量検出装置201は、逆電力量検出手段202と、送信手段203を備えている。自走式機器101は、車輪102と、走行制御手段103と、バッテリ108と、充電処理手段109と、送信手段203が送信する逆電力量を受信する受信手段107と、行動決定手段114を備えている。行動決定手段114は、受信手段107で受信する逆電力量がある閾値を以上になると走行制御手段103で制御して自走式機器101を充電台まで移動し、充電処理手段109により充電を行うよう行動決定する。これによって、発電装置が発電した電力を効率よく使用することができる。
(もっと読む)
移動ロボットの充電台復帰システム及びその方法
【課題】移動ロボットが一層迅速かつ効果的に充電台に復帰できる移動ロボットの充電台復帰システム及びその方法を提供する。さらに、高速復帰案内領域を形成できる移動ロボットの充電台復帰システム及びその方法を提供する。
【解決手段】少なくとも一つ以上の案内信号を出力して多数のドッキング案内領域を形成し、案内信号の進行方向を調節して案内信号の重畳領域に高速復帰領域を形成する充電台(100)と、充電台によって形成される高速復帰領域を探知して充電台に高速復帰する移動ロボット(200)と、を含んで移動ロボットの充電台復帰システムを構成する。
(もっと読む)
81 - 100 / 153
[ Back to top ]