
Fターム[5H301QQ04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 特殊な動作をする移動体 (317) | 移動体上の電源の充電、交換をするもの (153)
Fターム[5H301QQ04]に分類される特許
21 - 40 / 153
移動型ロボットシステム
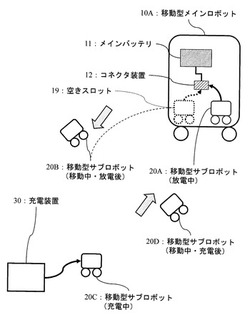
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
搬送車システム

【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
自律移動体
【課題】干渉する可能性のある障害物が存在する場合に、停止行動又は退避行動を状況に応じて適切に行うことが可能な自律移動体を提供することを目的とする。
【解決手段】自律移動体1は、レーザレンジセンサ12と電子制御装置20とを備える。電子制御装置20は、自機の大きさD2を記憶する記憶部22と、自機が移動可能な領域である通路95の幅方向の大きさを示す空間サイズD1を特定する幅特定部27と、障害物情報に基づき、路面において移動目標方向72と略直交する方向について、干渉障害物66の大きさD8を算出する算出部23と、空間サイズD1、自機の大きさD2、及び干渉障害物66の大きさD8に基づいて、停止行動又は退避行動を選択する行動選択部24と、停止行動が選択された場合、自機を停止させ、退避行動が選択された場合、自機を退避させる移動制御部25とを備える。
(もっと読む)
移動体
【課題】ランドマークを誤認識する可能性を低減することが可能な移動体を提供する。
【解決手段】予め設定された測定領域に存在するランドマーク25までの距離及び角度を計測するレーザレンジファインダ12と、前記測定領域を決定する測定領域決定部45を有し、レーザレンジファインダ12の計測結果に基づいて予め教示された走行経路上を走行するように走行を制御する制御装置34とを備える。
(もっと読む)
発電装置および方法、並びにプログラム
【課題】発電をより適切に行うことができるようにする。
【解決手段】掃除機100の筺体は、側面102によって、八角形が形成される。その側面102の内側は、山型の形状をなしている。つまり、各上面101は、側面102側から中央に向かって高くなるような、互いに異なる方向を向く斜面として形成される。各上面101に設置される太陽電池ユニット111が、互いに異なる方向に向くので、光が一方向から照射されると、ユニット間で発電量に偏りが生じる。掃除機100は、各太陽電池ユニット111の発電量を比較することにより、どの方向から光が照射されているのか把握する。移動制御部151は、移動機能部171を制御して掃除機100の筺体を、光の照射方向に向かう方向に移動させる。本発明は、例えば、発電装置に適用することができる。
(もっと読む)
経路探索システム、経路探索方法、及び移動体
【課題】理想的な最短経路により近い経路を生成可能とする。
【解決手段】本発明に係る経路探索システム110は、進入禁止グリッドが設定されたグリッドマップを記憶する地図情報記憶部111と、移動始点及び障害物からの距離に応じたポテンシャル値に基づき、各グリッドの距離ポテンシャル値を生成する距離ポテンシャル生成部112と、前回のグリッド探索ベクトルから、次探索グリッドの決定と、局所ポテンシャル場計算用グリッドの選択をする探索グリッド決定部113と、局所ポテンシャル場を計算する局所ポテンシャル場計算部114と、前回のグリッド探索ベクトルが次探索グリッドに進入する際のエッジ上の点を探索枝の基点として、局所ポテンシャル場の最急勾配で降る方向に探索枝を延ばし、その方向をグリッド探索ベクトルとして決定するグリッド探索方向決定部115とを備える。
(もっと読む)
搬送台車システム
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
経路探索システム、方法、プログラム、並びに移動体
【課題】短時間で終点までの経路を確実に探索することができる経路探索システム、経路探索方法、経路探索プログラム、及び移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、グリッドで表された領域に含まれる始点から終点までの経路のうち、そのコストが最小のものを選択する経路探索システムであって、最小コストのノードを展開していくノード展開部112と、展開された前記最小コストのノードに対する移動方向を判定する判定部113と、を備え、移動方向に応じて、最小コストのノードからの展開方向の数を設定する経路探索システム。
(もっと読む)
接近困難な内部スペースを独立的に検査するための車両
【課題】僅かな所要スペースと良好な操縦可能性を特徴とし、多種の検査形式に適しており、問題なく内壁に沿って任意の空間的方向に動くことができるような、接近困難な内部スペースを独立的に検査するための装置を提供する。
【解決手段】強磁性の内壁24によって制限された接近困難な内部スペース、特に例えば蒸気タービンの蒸気室のような大きなキャスティング部分をセンサ23で検査するための車両10であって、共通の軸14を中心として回転可能な、軸方向で互いに間隔を置いて配置された、互いに独立的に駆動可能な少なくとも2つの車輪12,13を有している形式のものに関し、車両10が永久磁石等の付着手段21,22;25,26を有しており、該付着手段が、車両10を重力に抗して、車輪12,13で各内壁24に保持することにより、全内部スペースを検査することができる。
(もっと読む)
自律移動装置
【課題】状況に応じてタスクの実行に適した行動をとることが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、目的地まで自律的に移動する際に所定のタスクを実行する自律移動装置であり、環境地図311を記憶する記憶部31と、周囲の障害物情報を取得するレーザレンジファインダ20と、周囲の障害物情報から未知の障害物情報を特定する未知情報特定部32と、未知の障害物情報が特定された場合に、該未知の障害物に関連した動き情報、相対位置情報、属性情報からなる複数の判断情報を取得する判断情報取得部33と、判断情報に基づいて、タスクの実行をキャンセル又は続行する旨の行動シナリオ以外の行動シナリオであってタスクを実行するために定義された行動シナリオを含む、複数の行動シナリオの中から一つの行動シナリオを選択するシナリオ選択部34とを備える。
(もっと読む)
経路探索システム、経路探索方法、経路探索プログラム、及び移動体
【課題】人間の通行が妨げられるのを防ぐことができる経路探索システム、経路探索方法、経路探索プログラム、及び移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、移動領域内に存在する移動始点より移動を開始し、移動領域内に存在する移動終点に到達する移動体の移動経路を探索するロボットであって、移動領域の情報に基づいて、基準経路を探索する最適経路探索部112と、基準経路の進行方向に基づいて、シフト方向を決定するシフト方向決定部113と、基準経路をシフト方向にシフトして、移動経路を決定する移動経路決定部115と、を備えるものである。
(もっと読む)
自律ロボットにより表面を完全にカバーする方法およびシステム
表面をナビゲートするように構成されたロボットであり、ロボットは、移動機構と、表面に関するデータを表すとともに、ナビゲーション中に観測された一つまたは複数の特性と位置を関連付ける論理マップと、初期位置および初期方位を含む初期姿勢を確立するように構成された初期化モジュールと、領域をカバーするようにロボットを移動させるように構成された領域カバーモジュールと、ロボットに未追跡の縁部をたどらせるように構成された縁部追跡モジュールと、初期姿勢の少なくとも一部に基づいて少なくとも部分的に定義された第1の領域上の領域カバーを呼び出し、少なくとも一つの追加領域上の領域カバーを呼び出し、縁部追跡を呼び出し、かつ領域カバーを呼び出すように構成されて、たどられるときにマッピングモジュールに追跡済み縁部に印をつけさせ、かつ縁部追跡中に発見された領域上に第3の領域カバーをもたらす制御モジュールと、を含む。
 (もっと読む)
(もっと読む)
外殻ロボット駆動システム
外殻ロボットは、ロボット本体と、外殻の周囲でロボットを移動させるための少なくとも一つの駆動モジュールと、搭載型動力源と、この搭載型動力源から動力の供給を受ける駆動モジュール用の動力サブシステムとを含む。複数の永久磁石要素が、駆動モジュールと関連付けられており、かつ、それぞれ、外殻に隣接したときの非短絡状態と、外殻に隣接していないときの短絡状態との間で切り換え可能となっている。 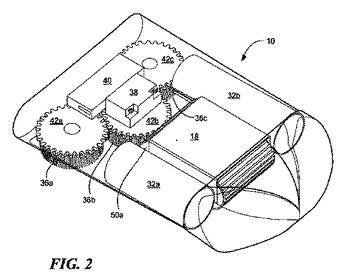 (もっと読む)
(もっと読む)
バッテリ自動交換・自動充電装置
【課題】無人搬送台車の稼働率を下げることなく、無人搬送台車のバッテリ交換を自動的に行うことができる無人搬送台車のバッテリ自動交換・自動充電装置を提供する。
【解決手段】バッテリBを搭載するバッテリトレー10を有する無人搬送台車1と、無人搬送台車1を位置決めすると共に、無人搬送台車1を搬送する搬送機構20と、搬入レーン31および搬出レーン32a、32b、32cを備えたバッテリBを搬送するコンベア30と、搬入レーン31の端部31aに隣接する床面に立設され、バッテリトレー10の一端側を押し上げて該バッテリトレーを傾斜させる台座60と、搬入レーン31および搬出レーン32a、32b、32cの上方にそれぞれ設置されているバッテリBを着脱自在に接続する充電用電源端子45a〜jとを備えている。
(もっと読む)
電池式移動装置
【課題】電池式移動装置において、簡単な構成により、電池交換のために要する時間の短縮と装置の稼働率向上をを可能とする。
【解決手段】移動装置1は、複数の電池BTを搭載する電池搭載部11と、搭載された電池BTのいずれか1つを動力源として装置本体10を移動させる走行部12と、現在使用中の電池BTから他の電池BTに切り替えるタイミングを判定する電池切替判定部14と、次に用いる電池BTを選定する電池切替制御部15と、選定結果に基づいて動力源を次の電池BTに切り替える接続切替部16と、電池BTの切り替えが行われた時、使用済みの電池BTを充電済みの電池BTと交換するために、外部に電池交換要求を出す電池交換要求部17と、を備えている。電池交換要求によって電池を持ってきてもらい、交換させるので、電池交換中においても移動装置1の本来の作業を中断することなく続行できる。
(もっと読む)
移動ロボットシステム
【課題】 充電装置の特別な動作や形状を必要とせず、さらに、移動ロボットの位置決め誤差を小さくするために複雑な制御や高価な部品、機構を必要とせずに、充電装置の充電用接点と移動ロボットの充電用電極が確実に接触可能な移動ロボットシステムを提供する。
【解決手段】任意の方向に移動可能な移動ロボットが充電を行う際、壁を背にした充電装置の位置を認識し、前記充電装置付近へ移動すると、前記壁の方向へ移動し、前記移動ロボットに取り付けられた接触部と、前記壁が接触していることを確認すると、前記接触部を前記壁に押し当てながら、前記充電装置の方向へ近づき、前記接触部に取り付けられた充電用電極と前記充電装置内に収納された充電用接点が接触したことを確認すると、前記移動ロボット内に収納された充電池の充電を開始する移動ロボットシステム。
(もっと読む)
移動ロボット充電システム
【課題】複数の移動ロボットの充電作業を最適に制御する。
【解決手段】このシステムは、複数の移動ロボットと、複数のロボットのバッテリの充電を行う充電器と、移動ロボットよりバッテリの充電残量を示す情報を取得し、充電残量に応じて予め設定された複数の優先度のうち適切な優先度を移動ロボット毎に設定し、充電状態に応じて充電が必要な移動ロボットを充電器まで自動走行させて充電作業を行わせる充電制御装置を備える。充電制御装置は、充電器によって充電できる最大数の移動ロボットが充電中であって、新たに充電が必要になった移動ロボットに設定された優先度が、充電中の移動ロボットの優先度よりも高い場合には、充電中の移動ロボットのうち最も低い優先度が設定された充電中の移動ロボットの充電を停止させ、新たに充電が必要となった移動ロボットに充電作業を行わせる。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
倒立型移動体及びその異常判断方法
【課題】簡素な構成を用いて、倒立制御の異常を高精度に判断すること。
【解決手段】倒立型移動体1は、駆動輪31、32の回転速度Vを検出する速度検出部24と、駆動輪31、32の目標回転速度VTを設定する目標速度設定部231と、駆動輪31、32を制御して、倒立型移動体1の倒立制御を行う倒立制御部232と、速度検出部24により検出された回転速度Vと、目標速度設定部231により設定された目標回転速度VTと、の速度偏差ΔVを算出する速度偏差算出部233と、速度偏差算出部233により算出された速度偏差ΔVに基づいて、倒立制御が異常であるか否かを判断する異常判断部235と、を備えている。
(もっと読む)
21 - 40 / 153
[ Back to top ]