
Fターム[5H301QQ04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 特殊な動作をする移動体 (317) | 移動体上の電源の充電、交換をするもの (153)
Fターム[5H301QQ04]に分類される特許
61 - 80 / 153
自走式作業ロボット

【課題】走行する上で、障害物を簡単に乗り越えたり、降りたり、傷付きもない自走式作業ロボットを提供することを目的とする。
【解決手段】ロボット本体1下部前側に配置した、走行手段を構成するキャスター部7を起伏自在としたものである。これによって、ロボット本体1が段差13に衝突したとしてもキャスター部7が衝撃を逃がすように伏状態となるため、スムーズに無理なく段差13を乗り越えたり、降りたり、傷付きもなく走行することができるものである。
(もっと読む)
自己移動ロボット制御システム及び方法
信号発生モジュールを有する基地局と、少なくとも、エネルギ蓄積部、基地局の信号発生モジュールにより発生された信号を検知するためのセンサ、及びロボットを基地局に戻すように当該検知された信号に基づいてロボットの動きを制御するためのプロセッサを有する自己移動型ロボットと、を備えたシステム。このロボットは、表面にわたりロボットをランダムに動かすようロボットの動きを制御するための手段であって、ロボットの絶対位置が記憶されないようにした手段と、基地局に戻るようにロボットの動きが中断させられた中断箇所をマーキングするための手段と、マーキングを用いてロボットを基地局から中断箇所へ戻すための手段と、を有する。 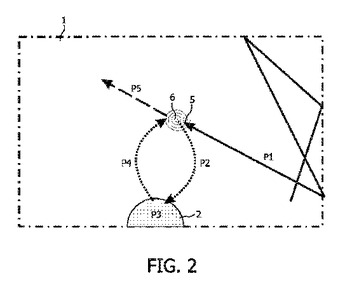 (もっと読む)
(もっと読む)
自走式機器およびそのプログラム

【課題】清掃後に機器本体のセンサのメンテナンスを自動的に行い、定期的なセンサのメンテナンスを不要とした自走式機器を提供することを目的とする。
【解決手段】機器本体100を移動させる移動手段102と、機器本体の走行をコントロールするコントロール手段101と、電力を供給する電池104と、機器本体の移動により走行する空間の清掃を行う清掃手段103と、清掃後にホームポジションへ移動した機器本体を自動的にメンテナンスする自動メンテナンス手段105を備えたものである。これによって、清掃後に機器本体100のセンサのメンテナンスをホームポジションにおいて自動的に行い、定期的なセンサのメンテナンスを不要としたものである。
(もっと読む)
走行体が適用される建物、建物用の走行体及び建物用の走行体システム
【課題】高さ位置が相互に異なる床が存在する建物において、単一又は少数の走行体での対応を可能とする建物、その建物用の走行体及び建物用の走行体システムを提供する。
【解決手段】住宅10は、二階床部14によって上下に仕切られた一階スペース11と二階スペース12とを備えており、さらにこれら一階スペース11及び二階スペース12に隣接させて吹き抜けスペース16が設けられている。当該住宅10には、移動ロボット30が適用されており、移動ロボット30は各スペース11,12,16の床部13,14上を走行して特定の作業を行う。当該構成において、吹き抜けスペース16には昇降用軌道としてポール21が設けられており、移動ロボット30は当該ポール21を介して昇降することで各スペース11,12,16間を移動する。
(もっと読む)
自律走行型ラインカー
【課題】運動場等に競技用等のラインを引く作業は、複数人による事前準備から最終的なラインを引くまでの間に多くの手間隙が必要であった。また、ラインを引く作業においても、人の手による熟練の度合いにより出来上がりに違いが出てしまう問題があった。
【解決手段】予め作成された競技用等のラインを引く為のデータを、本体内に格納し、ラインカー本体自身がその格納された事前のラインを引くデータを元に自律して走行することにより運動場等に競技用等のラインを正確に引くことができるようにする。
(もっと読む)
倒立振子型移動体、及びその制御方法
【課題】安定して走行可能な倒立振子型移動体、及びその制御方法を提供する。
【解決手段】本発明にかかる倒立振子型移動体は、車輪を回転可能に支持する車台16と、駆動輪18、20と、車輪を回転駆動するモータ34、36と、ロッド26を介して車台16に対して回動可能に支持された車体12と、車輪の車軸に対する車体12の重心位置に応じて変化する変化量を測定するジャイロセンサ48と、車体12を駆動して、車軸の位置に対する車体12の重心位置を変化させる姿勢制御用アクチュエータ40と、車体12の変化量がしきい値を越えた場合に、車体12の傾斜角速度を低減させるに姿勢制御用アクチュエータ40を駆動する制御部80と、を備えるものである。
(もっと読む)
自律移動型ロボットの特定位置誘導制御方法
【課題】本発明は、自律移動型ロボットが滑らかな動作で任意の場所に、任意の方向から任意の向きで進入することができる自律移動型ロボットの特定位置誘導制御方法を提供することを目的とする。
【解決手段】自律移動型ロボットの特定位置誘導制御方法であって、自律移動型ロボットを移動させる移動ステップと、自律移動型ロボットの周囲の状況を撮影する撮像ステップと、特定位置の上方に設けられたマーカを抽出するマーカ抽出ステップと、撮像ステップにて撮影された撮像画像をもとに前記特定位置の方向を算出する方向算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の間の距離を算出する距離算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の該ロボット進入する姿勢方向を算出する姿勢方向算出ステップと、を有しており、自律移動型ロボットを前記特定位置の特定の方向から進入させることを特徴とする。
(もっと読む)
自走式装置
【課題】自律走行する自走式装置において、自走式装置の回転径よりも狭い袋小路に侵入してしまった場合でも、当該袋小路から脱出できる自走式装置を提供する。
【解決手段】セキュリティロボット4(自走式装置)に、前方及び側方に位置する障害物を検出する障害物検出部47と、障害物検出部47による障害物の検出の時間間隔が所定の閾値を下回ったか否かを判定する判定プログラム483eを実行したCPU481と、障害物検出部47により障害物が検出された際、判定プログラム483eを実行したCPU481により障害物検出部47による障害物の検出の時間間隔が所定の閾値を下回ったと連続して判定された回数が所定の限度回数を上回った場合に、セキュリティロボット4を後進させた後回転させる脱出動作をセキュリティロボット4に実行させる回避脱出制御プログラム483fを実行したCPU481と、を備えるよう構成した。
(もっと読む)
自走式装置誘導システム
【課題】自走式装置と、当該自走式装置を誘導する充電装置と、を備える自走式装置誘導システムにおいて、より簡易且つより低コストな構成で、効率よく確実に自走式装置を充電装置まで誘導する。
【解決手段】充電装置2に、被受光距離が異なる複数種類の光信号Mを交互に発光する発光部22を備え、セキュリティロボット(自走式装置)に、発光部22により発光された光信号Mを受光する受光センサ452と、当該受光された光信号Mの種類を判別する判別プログラムを実行したCPUと、当該判別された光信号Mの種類に応じた回転速度で光信号Mが到来する方向にセキュリティロボットの進行方向が向くようセキュリティロボットを回転させる回転制御プログラムを実行したCPUと、当該判別された光信号Mの種類に応じた走行速度で光信号Mが到来する方向にセキュリティロボットを直進走行させる直進走行制御プログラムを実行したCPUと、を備えるよう構成した。
(もっと読む)
移動ロボットによって提供される画像を投影する移動電子会議システム
移動ロボットと遠隔制御ステーションとを含む遠隔制御ロボット・システム。移動ロボットは、画像を取り込むカメラを含む。遠隔制御ステーションは、ロボット・カメラによって取り込まれた画像を表示するモニタを含むことができる。プロジェクタが、画像を投影するために遠隔制御ステーションに結合される。このシステムは、比較的多数の見る聴衆への、ロボットによって取り込まれた画像の投影を可能にする。したがって、聴衆は、移動するロボットによって提供される画像を見ることができる。  (もっと読む)
(もっと読む)
充電池搭載移動体の充電装置
【課題】充電池を搭載した移動体が、充電器に自走して到達し、充電する構成を実現することをもくてきとする。
【解決手段】充電器18から発射される赤外線の線束の左右の限界を移動体1に搭載した左信号受信部12、右信号受信部13によって検出し、線束の中心に向かって進行し、再度線束の中心を検出することを繰り返す。また、移動体1の充電用接点11の左右には左ガイド16、右ガイド17が設置され、充電器18側に摺動可能に設けられた電力供給用接点23と充電用接点11が嵌合するのを助ける構成とした。
(もっと読む)
物品を仕分けする方法および機器
【解決手段】 複数の仕分け先に物品を仕分けする方法および機器が提供される。前記物品は、複数の個別制御される送達車両の1つに載せられる。前記送達車両は、前記仕分け先へ当該送達車両を案内(誘導)する軌道を進み、前記仕分け先は前記軌道に沿って位置する。前記送達車両は、適切な仕分け先に到着すると、当該仕分け先に前記物品を排出し、送達すべき別の物品を受け取るため戻る。
(もっと読む)
自走式装置
【課題】装置本体部に対して斜め後方から衝撃が加わった際に、障害物の検知を適正に行う。
【解決手段】所定の室内の床面上を自立走行するセキュリティロボットであって、上側カバー部に設けられた左右の側方カバー部材を有し、装置本体部に側方から加わる衝撃を緩衝する側方衝撃緩衝部と、側方カバー部材と障害物の接触に基づいて、障害物を検知する障害物検知センサとを備え、障害物検知センサは、側方カバー部材に取り付けられ、障害物の検知状態を切り替える検知状態切替部材30を備え、さらに、側方カバー部材に斜め後方から斜めに衝撃が加わった場合に、障害物検知センサによる障害物の検知状態を切り替えるように検知状態切替部材の移動を案内する突状軸部195及び挿通孔部187並びに突片部196及び接触面部1862bを備える。
(もっと読む)
遠隔監視システム
【課題】 監視員が把握していない異常記録を容易に確認できる遠隔監視システムの提供。
【解決手段】監視センタは、移動ロボットに自動的に復旧処理を実行させる自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに受信した異常信号の情報と、その他の動作モードであるときに受信した異常信号の情報とを区別可能にセンタ記憶部に記憶する記憶制御手段と、モード設定手段にて動作モードが自動復旧モードからその他のモードへ設定されると、自動復旧モードであるときに記憶された異常信号の情報からなる異常履歴又は該異常履歴を表示するためのダイアログを表示部に表示する履歴表示手段とを有する。
(もっと読む)
自律移動装置群制御システム
【課題】自律移動装置群制御システムにおいて、簡単な構成により、搬送業務の忙しい場所へは多くの自律移動装置を移動させ、かつ、搬送能力の低下につながる自律移動装置の一所への密集を回避して自律移動装置の有効活用と効率的な搬送を可能とする。
【解決手段】制御システム1は、領域Aにおける複数の機器2に物品の供給や回収をする複数の自律移動装置3と、自律移動装置3に動作指示する中央制御装置4とを備える。領域Aは複数のサブ領域SA1などで構成される。中央制御装置4は目標機器に自律移動装置3を指定する動作指示部と、サブ領域内の自律移動装置3の台数を取得する装置台数取得部と、サブ領域に存在可能な自律移動装置3の最大台数Mxを記憶する記憶部とを備える。動作指示部は、自律移動装置3の台数と最大台数Mxとを比較し、サブ領域に台数増が可能な場合に自律移動装置3に動作を指示し、密集を回避して効率的搬送を可能とする。
(もっと読む)
ロボット掃除機システム
【課題】敷居の高さにこだわらず、ロボット掃除機が円滑に敷居を乗り越えることができるようにする。
【解決手段】ロボット掃除機に内蔵された充電バッテリを充電するためにロボット掃除機10と接続される充電ステーション20とを備えたロボット掃除機システムにおいて、充電ステーション20は、敷居の高さを選択的に設定できる敷居高さ設定スイッチ21を含み、ロボット掃除機の制御部は、充電ステーション20に設定された敷居高さ設定値を充電ステーションから受信してメモリ12に保存し、ロボット掃除機の走行中にロボット掃除機の高さ検知センサ14により検出された敷居の高さとメモリに保存された保存値とを比較し、検知された敷居の高さが保存値の以下であるとロボット掃除機が敷居を乗り越えて走行し、保存値を超過すると後進及び回転した後に走行する。
(もっと読む)
自走式装置及び自走式装置誘導システム
【課題】安価な構成で、確実に所望の位置まで誘導されて移動することができる自走式装置及び当該自走式装置を誘導する自走式装置誘導システムを提供する。
【解決手段】予め設定された所定のタイミングになると発光装置(充電装置)により発光された光ビームに誘導されて移動する自走式装置(セキュリティロボット4)に、側面全周で全方向からの光を1つの光センサ45a4により受光して検出する第1検出部45aと、進行方向からの光を1つの光センサ45b2により受光して検出する第2検出部45bと、予め設定された所定のタイミングになると、第1検出部45aによって充電装置により発光された光ビームが検出された際に、第2検出部45bによって充電装置により発光された光ビームが検出されるようにセキュリティロボット4を回転させる回転制御プログラム463dを実行したCPU461と、を備えるよう構成した。
(もっと読む)
自律走行装置
【課題】走行装置本体の部屋座標を正確に計測できない場合でも無駄な走行をすることなく確実かつ精度よく走行を終了できる自律走行装置を提供することを目的とする。
【解決手段】走行装置本体9が走行する部屋の情報を記憶する部屋情報記憶手段1と、部屋情報から基本往復回数を出力する往復回数計算手段2と、基本往復回数から基本走行時間を計算する走行時間計算手段3と、走行装置本体の計測走行時間を出力する走行時間計測手段4と、基本走行時間と計測走行時間から走行工程が終了を判断する走行工程終了判断手段5と、走行工程を終了する往復走行工程終了手段6とを備えたものである。これによって、部屋の情報に応じた基本走行時間を決定し、その走行時間に到達したときに、走行装置本体9の走行終了と判断するものである。したがって、走行装置本体9の部屋座標を正確に計測できない場合でも無駄な走行をすることなく確実かつ精度よく走行を終了できる。
(もっと読む)
発光装置及び自走式装置誘導システム
【課題】安価な構成で、自走式装置に確実に検出されるとともに、自走式装置を正確に誘導することができる発光装置及び当該発光装置により自走式装置を誘導する自走式装置誘導システムを提供する。
【解決手段】自走式装置(セキュリティロボット)を誘導するための光ビームMを発光する発光部22を備えた発光装置(充電装置)において、発光部22は、光ビームMを発生する発生部221と、発生部221により発生された光ビームMを、左右方向に収束させ且つ上下方向に拡散させるように導光する導光板222と、を備えるよう構成した。
(もっと読む)
無人搬送車の二次電池監視装置
【課題】無人搬送車2の動作状態に応じて、各動作状態に対応して予め設定しておいた放電電流値等を積算することにより、高価な電流検出器やA/D変換器を用いることなく、放電容量(残存容量)を検出することができる無人搬送車の二次電池監視装置を提供する。
【解決手段】二次電池3を電源として無軌道上又は軌道上を走行することにより積荷を搬送する無人搬送車2において、この無人搬送車2の動作状態を検出する動作状態検出手段と、一定時間ごとに、この動作状態検出手段が検出した動作状態に対応して予め定められた放電電流値を積算することにより放電容量を算出する放電容量積算手段とを備えた構成とする。
(もっと読む)
61 - 80 / 153
[ Back to top ]