
Fターム[5H303AA30]の内容
Fターム[5H303AA30]に分類される特許
1 - 20 / 92
ステージ機構およびその駆動方法
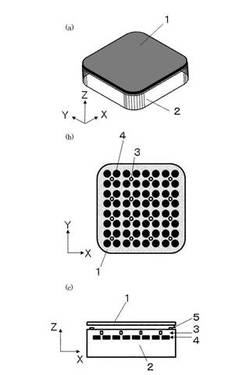
【課題】ステージを搭載する固定ベース表面に組み込んだマイクロヒータアレイで構成されるコンパクトなアクチュエータシステムで、XY方向、ヨー回転方向の3自由度に関する長ストローク駆動、およびZ/ピッチ/ロール方向の微細駆動を実現することができるステージ機構およびその駆動方法を提供する。
【解決手段】ステージ1に接触するベース2の表面近傍に、ベース2の表面の熱変形突出用の第一層目のヒータ3をXY方向にアレイ状に複数配置し、更にベース2の表面から深いところに、第一層目のヒータ3の前後左右を挟み込むように第二層目のヒータ4をXY方向にアレイ状に複数配置する。第二層目のヒータ4が、第一層目のヒータ3による熱変形突出部をXY方向に移動することにより、熱変形突出部に接触するステージ1をXYθ方向に駆動する。
(もっと読む)
太陽追尾装置

【課題】出力を簡易に検出できる太陽追尾装置を提供すること。
【解決手段】太陽の方位に対応して回転可能に構成される第1軸7及び太陽の高度に対応して回転可能に構成される第2軸8により、太陽光を受光する受光部9が支持されている。第1軸7は重力軸Gに対して回転軸心Oが傾斜して配置されているので、第1軸7が回転すると、第1軸7に固定された第1傾斜センサ41は重力軸Gと検出軸Dとの角度を変えながら、即ちセンサ出力を変えながら回転軸心Oの回りを回転する。第1軸7の回転角と第1傾斜センサ41のセンサ出力とを対応させることにより、出力を簡易に検出できる。第1軸7に連係して回転される第2軸8や受光部9に第1傾斜センサ41が固定されるときも同様に、出力を簡易に検出できる。
(もっと読む)
太陽光パネルユニット
【課題】屋根に作用する荷重を軽減可能で、且つ、設計自由度の高い太陽光パネルユニットを提供すること
【解決手段】回動軸(14)が設けられた太陽光パネル(11a,11b)と、太陽の向きに応じて太陽光パネル(11a,11b)を回動軸(14)の軸周りに回動させる駆動機構(20)とを備えている。駆動機構(20)は、空気圧によって屋根(R)と平行に伸縮変形するエアシリンダ(21,22)と、太陽光パネル(11a,11b)に連結され、エアシリンダ(21,22)の伸縮動作をその変位量よりも大きい変位量となるように屋根(R)の略鉛直方向の動作に変換して太陽光パネル(11a,11b)を回動させるリンク機構(30)とを備えている。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
位置決め装置及び位置決め方法
【課題】高精度かつ高速に位置決めすることが可能な位置決め装置を提供すること。
【解決手段】本実施形態に係る位置決め装置は、撮像器3による撮像画像データに基づいて追跡誤差信号を算出する画像処理部40と、追跡誤差信号及び粗動機構のセンサ信号に基づく粗動機構制御信号により粗動機構1を制御する粗動機構制御駆動部10と、追跡誤差信号及び微動機構のセンサ信号に基づく微動機構制御信号により微動機構を制御する微動機構制御駆動部20と、粗動機構1の駆動力又は駆動トルクと、粗動機構1のセンサ信号と、機構パラメータ記憶部に記憶された機構パラメータとから、機構の運動方程式に基づいて粗動機構の動作により発生する撮像器の撮像画面内の加速度を算出し、粗動微動機構部の目標物に対する追跡誤差を低減させるために微動機構制御信号へ加算する微動機構追跡補正信号を加速度に応じて生成する補正信号生成部30とを具備する。
(もっと読む)
ジンバル機構、およびこのジンバル機構を備えた飛しょう体
【課題】飛しょう体の飛翔時に生じる共振を抑制できるジンバル機構、およびこのジンバル機構を備えた飛しょう体を提供することを課題とする。
【解決手段】
ジンバル機構1は、飛しょう体10のベース5に基端部を固定した支持アーム3、4、支持アーム3、4に回動自在に取り付けられた追跡装置2、およびこの追跡装置2と支持アーム3、4を囲むようにベース5に固定された外筒7を有する。そして、このジンバル機構1は、共振を抑制するため、支持アーム3、4と外筒7との間に共振抑制部材9を備えている。
(もっと読む)
4軸アライメントステージ
【課題】 4つの各駆動ユニット同士の機械的な姿勢の干渉による過剰な出力を防止する。
【解決手段】 ベース1と上部プレート2との間における上部プレート2の一方の対角位置と対応する2個所に、XYθガイド4とX軸方向のボールねじ直動機構6からなるX軸方向駆動ユニット3xを介装し、上部プレート2の他方の対角位置と対応する2個所に、XYθガイド4とY軸方向のボールねじ直動機構6からなるY軸方向駆動ユニット3yを介装する。リニアスケール13の検出値に基づくフィードバック制御を行うX軸方向駆動ユニット3xに比して、Y軸方向駆動ユニット3yは、ボールねじ直動機構6のサーボモータ12に設けたモータエンコーダ16による検出値に基づくフィードバック制御を行うことでサーボ剛性が小さくなるようにして、姿勢干渉による推力上昇分をY軸方向駆動ユニット3yで機械的に吸収させる。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
発電装置および方法、並びにプログラム
【課題】発電をより適切に行うことができるようにする。
【解決手段】掃除機100の筺体は、側面102によって、八角形が形成される。その側面102の内側は、山型の形状をなしている。つまり、各上面101は、側面102側から中央に向かって高くなるような、互いに異なる方向を向く斜面として形成される。各上面101に設置される太陽電池ユニット111が、互いに異なる方向に向くので、光が一方向から照射されると、ユニット間で発電量に偏りが生じる。掃除機100は、各太陽電池ユニット111の発電量を比較することにより、どの方向から光が照射されているのか把握する。移動制御部151は、移動機能部171を制御して掃除機100の筺体を、光の照射方向に向かう方向に移動させる。本発明は、例えば、発電装置に適用することができる。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
モータ駆動装置
【課題】速度制御で動作するモータ駆動装置において、バックラッシュ補正を行う手段を提供することを目的とする。
【解決手段】コントローラ2は、モータ駆動装置1からのモータ位置フィードバックパルス113をパルスカウンタ202で受信し、モータ位置203を得る。モータ位置203を位置指令201と減算器204で比較し、位置偏差205を得る。位置偏差205は位置比例制御器206で位置比例ゲイン倍されて速度指令207となる。これをD/A変換器208でアナログ速度指令209に変換し、モータ駆動装置1に出力する。
(もっと読む)
太陽光発電装置
【課題】対環境性能が高く最低限の発電量を確保して発電量の低下や変動を抑えることができるとともに、大電力を確保するために多数の太陽電池モジュールを設置する必要がある場合においてもコストを抑えることができる太陽光発電装置を提供する。
【解決手段】複数の太陽電池モジュールと、複数の太陽電池モジュールが設置された場所の環境条件を測定する環境測定装置5と、環境測定装置5により測定された環境条件に基づいて、複数の太陽電池モジュールの各々がなすべき目標仰角を算出する演算装置6と、演算装置6により算出された目標仰角に基づいて、複数の太陽電池モジュールの各々の仰角を制御する方向制御装置7とを備える。
(もっと読む)
プローブユニット相対的平行度調整装置、プローブユニット相対的平行度調整方法、プローブユニット相対的平行度調整プログラム、プローブユニット及びパネル搬送部材
【課題】 帯状電極が短手方向に並設されているパネル部材に対し、各帯状電極と接触するプローブを設けたプローブユニットが相対的に平行であることの確認・調整を短時間で実行できる装置を提供する。
【解決手段】 本発明の装置は、パネル部材に対するプローブユニットの相対的平行度を調整する傾き調整機構と、プローブユニット及びパネル部材間の距離を検出する複数のセンサと、プローブ及び帯状電極が相対的に接近して接触する前後の各センサからの出力を取り込むセンサ出力取込手段と、取り込んだ各センサの出力に基づいて、プローブユニットの平行度調整において参照する情報を形成する調整参照情報形成手段とを備えたことを特徴とする。
(もっと読む)
平面モータ
【課題】価格の安いリニアエンコーダを用いて安価な平面モータを実現する。
【解決手段】プラテン上に載置され該プラテン上をX−Y方向に駆動可能に構成されたスライダを有する平面モータにおいて、前記スライダの位置検出手段として前記スライダに固定したヘッドと前記スライダが駆動されるX−Y方向に配置されたスケールからなるリニアエンコーダを用いた。
(もっと読む)
強風退避型太陽光発電システム
【課題】太陽光パネル上の個々の太陽電池セルを動かすようにすることで、すべての太陽電池セルが太陽光を垂直に受ける向きになるように保つことができるようにした太陽光発電システムにおいて、個々の電池パネルが風圧に弱いという問題を解消することができる太陽光発電システムを提供する。
【解決手段】駆動可能な支持部0120で支持される複数の太陽電池セル0110と、各太陽電池セル0110の支持部0120を太陽追尾のために姿勢駆動する駆動部0130と、風速を検知する風速検知部0140と、検知した風速が、太陽電池セル耐風圧許容度を超えるか判断する判断部0150と、判断結果が耐風圧許容度を超えるとの判断結果である場合に太陽電池セル0110が風圧に対して安全となる姿勢となるように駆動部0130を制御する制御部0160とからなる強風退避型太陽光発電システム。
(もっと読む)
集中型太陽光発電及び熱システム
集中型太陽光発電及び熱システムが開示される。システムは、このような高い集光レベルを欠如する構成よりも少数の太陽光発電レシーバーを必要とする効率的なエネルギー変換を生じる高い集中型太陽光エネルギーを生じる太陽光発電レシーバーアッセンブリを妥協する。太陽光発電レシーバーアッセンブリは、光源の光を電磁エネルギーレシーバー上に集光する主要な光学要素と、光源のさらなる集光を助ける二次的な光学要素と、熱エネルギーコンバーターと、放熱ユニットとを備える。太陽光発電レシーバーアッセンブリは、好ましくは、太陽の露呈を最大限にするために追従システムに取り付けられる。 (もっと読む)
太陽発電装置
【課題】 平面に略沿った受光面を有する複数の太陽電池パネル全ての受光面を、太陽の移動に追従し太陽光の照射方向に略垂直に向けることができる簡単な構造の太陽発電装置を提供する。
【解決手段】複数の太陽電池パネルを第1直線に略平行なパネル回動軸を中心に受光面が互いに略平行な状態を保ちつつそれぞれ回動可能に支持するパネル支持手段と、パネル支持手段を固定物に対し、第1直線と交わる第2直線に略平行な支持手段回動軸を中心に回動可能に支持する回動支持手段と、複数の太陽電池パネルをパネル回動軸を中心に連動して回動させるパネル回動手段と、パネル支持手段を支持手段回動軸を中心に回動させる支持手段回動手段と、を備えてなり、支持手段回動手段によるパネル支持手段の回動と、パネル回動手段による複数の太陽電池パネルの回動と、の両回動のみにより、太陽の移動に追従し、複数の太陽電池パネル全ての受光面を太陽光の照射方向に略垂直に向けるものである、太陽発電装置である。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
内視鏡型の操縦可能な構造体
非破壊検査用の可撓かつ操縦可能な構造体(20、32)であって、細長い本体(26)と、細長い本体(26)の少なくとも一部分の曲率を変化させることができる少なくとも1つのアクチュエータ(28、34)とを備えており、アクチュエータ(28、34)が、細長い本体(26)に組み合わせられた支持体(22)によって保持され、支持体(22)は、細長い本体(26)から離れており、または離すことができる遠位部(24、36)を有しており、遠位部(24、36)が、引っ張り線(30)によって細長い本体(26)の一部分に接続されている構造体。 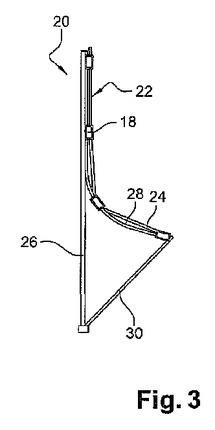 (もっと読む)
(もっと読む)
1 - 20 / 92
[ Back to top ]