
Fターム[5H303BB08]の内容
位置、方向の制御 (6,897) | 位置決め対象の種類(次元、軸) (1,310) | 駆動軸が3軸であるもの (55)
Fターム[5H303BB08]に分類される特許
1 - 20 / 55
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
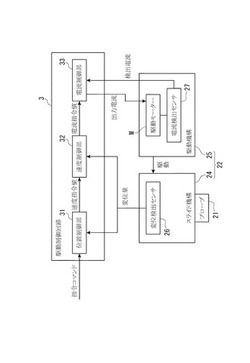
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
二次元位置決め装置

【課題】回転位置決めが可能でありながらXYの2次元の長ストローク化が容易で、且つ2次元位置決めテーブルを大形化する必要がない二次元位置決め装置を提供する。
【解決手段】案内部材3aに案内されて移動する移動部材3bとこの移動部材3bを駆動する駆動機構3eとを有し、所定間隔を保って平行に配設された一対の直動機構3A,3Bと、該一対の直動機構の移動部材3bに支持されて前記案内部材3aと交差する方向に配設された案内部材4bに案内されて移動する移動部材4cとこの移動部材4cを駆動する駆動機構4fとを有し、前記一対の直動機構間に配設された交差直動機構4とを備え、前記交差直動機構4は、一端が前記直動機構の一方の移動部材に.配設された固定支持部材5に回動可能に支持され、他端が前記直動機構の他方の移動部材との間に配設された前記第1の案内部材と交差する方向に移動可能な可動支持部材6に回動可能に支持されている。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
アライメントステージ及び処理装置
【課題】駆動効率及び動作速度を確保できるとともにコンパクトに構成でき、しかも、製造コストを低減することのできるアライメントステージ及び処理装置を提供する。
【解決手段】本発明のアライメントステージ10は、第1の回転駆動手段と、第2の回転駆動手段と、第1の回転軸線11xを中心に回転可能に軸支されるとともに第1の回転駆動手段により回転駆動される第1の回転体11と、第1の回転体に対して第1の回転軸線と平行な第2の回転軸線12xを中心に回転可能に軸支されるとともに第2の回転駆動手段により回転駆動される第2の回転体12と、第2の回転体と一体に構成され、或いは、第2の回転体に固定若しくは連結された移動ステージ13と、を具備し、第2の回転駆動手段は、第1の回転軸線を中心に回転する第2の回転駆動軸4と、第2の回転駆動軸と第2の回転体との間に接続された第2の回転伝達機構9と、を有することを特徴とする。
(もっと読む)
平面モータ
【課題】価格の安いリニアエンコーダを用いて安価な平面モータを実現する。
【解決手段】プラテン上に載置され該プラテン上をX−Y方向に駆動可能に構成されたスライダを有する平面モータにおいて、前記スライダの位置検出手段として前記スライダに固定したヘッドと前記スライダが駆動されるX−Y方向に配置されたスケールからなるリニアエンコーダを用いた。
(もっと読む)
位置決め装置の設計方法、位置決め装置の製造方法、位置決め装置、及び露光装置
【課題】位置決めを高精度に実行することができる位置決め装置の設計方法、位置決め装置の製造方法、位置決め装置、及び露光装置を提供する。
【解決手段】第1方向に移動可能なXステージ100と、結合部により該Xステージ100に結合され、該Xステージ100に対して第2方向に移動可能なYステージ200と、Xステージ100を第1方向に移動させるモータ(不図示)と、を備える位置決め装置において、モータ(不図示)がXステージ100を移動させる力と、第1方向における該Yステージ200の位置と、の関係を表す伝達関数に基づく、剛体モードと、1次共振と、2次共振と、の関係に基づいて、位置決め装置のXステージ100及びYステージ200の少なくとも一方の作製上の諸元が定められる。
(もっと読む)
位置決め制御装置及びその方法
【課題】処理対象物の特定箇所に処理部を位置決めさせることを、コストを抑制しつつ、より簡易的に実施可能な位置決め制御装置及びその方法を提供する。
【解決手段】位置決め制御装置のコントローラ17は、可動体8の検知部9が処理対象物を検知することにより出力されるセンサ信号及びサーボモータ15の駆動に用いられるパルス信号を受信する手段と、可動体8を処理対象物の横断方向に移動させてセンサ信号が出力される間におけるパルス信号に関する情報と処理対象物のタイプとの関係を定めたテーブルを用いて、処理対象物のタイプを特定する手段と、特定した処理対象物のタイプに基づき、処理対象物のタイプと被処理部の位置との関係を定めたテーブルを用いて、処理対象物の被処理部の位置を特定する手段と、当該特定に基づくパルス列を生成してモータドライバ16に送信する手段とを有することを特徴とする。
(もっと読む)
工作機械の送り駆動系の制御方法及び制御装置
【課題】象限突起の補正量を運転状況に応じて適正に定めるとともに、補正のタイミングや補正形状のズレを極小にし、象限突起の補償を十分に行う。
【解決手段】送り駆動系の制御方法は、サーボモータにより送り運動される移動体の位置検出信号と位置指令信号とが一致するように速度指令信号を生成し、サーボモータの速度検出信号と速度指令信号とが一致するように駆動力信号を生成し、この駆動力信号に基づいてサーボモータの駆動力を制御する。位置指令信号を先読みし、位置及び送り速度から送り駆動系に作用する摩擦力を推定する摩擦力推定工程21と、位置指令信号の入力から実際に移動体位置が駆動されるまでの制御系をモデル化し、このモデルの摩擦力と位置指令との関係から、上記摩擦力推定工程で推定した摩擦力に相当する補正指令を算出し、この補正指令を位置指令に加算して摩擦力の補償を行う摩擦力補償工程22とを備える。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
集中型太陽光発電及び熱システム
集中型太陽光発電及び熱システムが開示される。システムは、このような高い集光レベルを欠如する構成よりも少数の太陽光発電レシーバーを必要とする効率的なエネルギー変換を生じる高い集中型太陽光エネルギーを生じる太陽光発電レシーバーアッセンブリを妥協する。太陽光発電レシーバーアッセンブリは、光源の光を電磁エネルギーレシーバー上に集光する主要な光学要素と、光源のさらなる集光を助ける二次的な光学要素と、熱エネルギーコンバーターと、放熱ユニットとを備える。太陽光発電レシーバーアッセンブリは、好ましくは、太陽の露呈を最大限にするために追従システムに取り付けられる。 (もっと読む)
平面3自由度ステージ
本発明は、平面3自由度ステージに関するもので、並進2自由度を有する並進運動機構部と、並進運動機構部と独立的に運動する回転1自由度を有する回転運動機構部と、並進運動機構部と回転運動機構部が設置され、内側の固定部及び外側の駆動部を備えるステージベースを含むことを特徴とし、これによると、並進運動と回転運動が独立的に行われるので、運動誤差を減少させることができ、制御及び設計を容易にすることができる。 (もっと読む)
軌跡測定装置
【課題】実際の使用状態にある機械の運動軌跡をジグや工具を外すことなく精度よく測定すること。
【解決手段】可動軸の運動加速度を測定するための加速度計13a、13bと、可動軸の加速度および指令位置またはフィードバックされた検出位置またはその両方とから運動軌跡を解析する運動軌跡解析部14と、解析された運動軌跡を表示する運動軌跡表示部15とを備え、加速度を2回積分して得られる機械位置と、検出位置または指令位置から推定される機械位置とを比較することで、加速度の測定とその積分に起因する誤差を分離し、機械位置を補正する。
(もっと読む)
位置決め制御装置及び位置決め制御方法
【課題】初期状態に関係なく位置ズレを補正できる位置決め制御装置を提供すことを目的とする。
【解決手段】 第1の速度で全軸同時に原点方向に移動させ全軸の原点ドグ信号検出にて全軸同時に減速停止させる第1の減速停止手段S05と、原点方向と逆方向に、第1の速度より遅い第2の速度にて全軸同時に移動させる逆方向移動手段S06と、全軸のドグ前進端を検出して各軸のドグ前進端位置を記憶部に記憶し、全軸同時に減速停止する第2の減速停止手段S08と、検出された各軸のドグ前進端位置に基づき、マスタ軸を基準とする各スレーブ軸の原点ドグ信号ズレ量を算出し記憶部に記憶する原点ドグ信号ズレ量算出手段S09と、各スレーブ軸の原点を原点ドグ信号ズレ量にて補正して各軸を原点に移動させる原点復帰手段S10とを備えている。
(もっと読む)
走査型露光装置及びデバイス製造方法
【課題】過剰制限による弊害を解消し、フォーカス駆動及び/又はレベリング駆動におけるステージの追従精度及び/又は同期精度を向上する。
【解決手段】原版および基板を移動させながら基板を露光する走査露光装置は、原版からの光を前記基板に投影する投影光学系と、基板を保持して移動するステージと、投影光学系の光軸の方向における基板の位置を計測する計測部とを有する。そして、この走査露光装置は、この光軸に直交する方向に関するステージの駆動状態に基づいて制限値を設定し、計測部によって計測された複数箇所における計測値に基づいてその平均値または基板の傾きを算出し、算出された平均値または傾きから生成される前記ステージの前記光軸の方向の駆動量と制限値を比較し、比較結果に応じて、駆動量が制限値を超えないようにステージの移動を制御する。
(もっと読む)
モーションコントロールシステム
【課題】
モーションコントローラと複数のサーボドライブがネットワークで接続されたモーションコントロールシステムにおいて、前記ネットワークに同期通信や同期クロックを伝える配線を必要としない安価な通信を使用して複数軸の同期を実現し、同期通信周期にとらわれずにサーボ制御処理を駆動することで応答性の向上を図れるようにする。
【解決手段】
前記モーションコントローラに、設定時間毎に起動割り込みを出力するインターバルタイマと、前記インターバルタイマの割り込み出力から設定時間遅延させた起動割り込みを出力する遅延タイマを備え、前記インターバルタイマからの起動割り込みでモーション指令をサーボドライブへ出力する処理を起動し、前記遅延タイマからの起動割り込みでタイマクリア要求をサーボドライブへ出力する処理を起動する。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
1 - 20 / 55
[ Back to top ]