
Fターム[5H303DD14]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 歪素子、圧電素子 (30)
Fターム[5H303DD14]に分類される特許
1 - 20 / 30
位置補正装置およびレーザ加工機
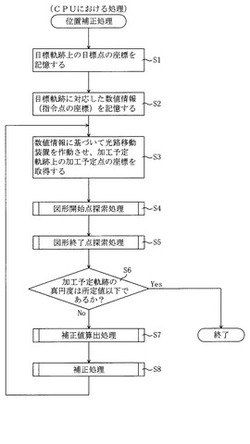
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
ステージ装置およびこれを用いた観察装置

【課題】観察サンプルを載置する可動テーブルをウォーキング形ピエゾモータにより駆動するピエゾステージと、前記ピエゾステージの移動を制御するステージ制御装置を有するステージ装置において、ピエゾステージの周期的な速度変動を抑制して、観察者がサンプルの移動を行う際の操作性と位置決め精度を向上する。
【解決手段】ピエゾステージ1のウォーキング形ピエゾモータ102を駆動する指令電圧標準データ304と、前記ウォーキング形ピエゾモータ102の出力に一定速度を与える様に予め測定した指令電圧出力タイミング補正データ305と、少なくとも前記指令電圧標準データ304および前記指令電圧出力タイミング補正データ305から前記ウォーキング形ピエゾモータ102を駆動する指令電圧を生成する指令電圧生成部302を有するステージ装置3が提供される。
(もっと読む)
平面3自由度ステージ
本発明は、平面3自由度ステージに関するもので、並進2自由度を有する並進運動機構部と、並進運動機構部と独立的に運動する回転1自由度を有する回転運動機構部と、並進運動機構部と回転運動機構部が設置され、内側の固定部及び外側の駆動部を備えるステージベースを含むことを特徴とし、これによると、並進運動と回転運動が独立的に行われるので、運動誤差を減少させることができ、制御及び設計を容易にすることができる。 (もっと読む)
位置決め装置
【課題】従来の位置決め制御装置に比べて位置決めステージの位置と制御装置の位置が遠く離れておりノイズが発生しやすい劣悪な環境下においてもノイズの影響を受けない安定な位置決めが可能な位置決め装置を提供する。
【解決手段】デジタル出力の位置センサが検出した位置決めステージが位置する現在値と1回前の制御サイクルにおいてデジタル出力の位置センサが検出した位置決めステージが位置した前回値との差が設定値以内の場合は位置決め演算に現在値を採用し、設定値より大きい場合は位置決め演算に前回値を採用する。
(もっと読む)
ステージ装置及びステージ位置決め制御方法
【課題】ステージの位置決め後にモータのサーボ制御を停止してもステージの位置ずれを発生させないように、ブレーキ機構を最適に制御できるステージ装置及び同装置のステージ位置決め制御方法を提供する。
【解決手段】ピエゾ素子632で駆動されるブレーキ機構を備える。それぞれの位置決めすべき点に初めて位置決めする際、ステージを移動、停止した後に、ブレーキ制御最適化手段640によりリニアモータ622に対する推力指令を0に近づけるようにブレーキ駆動指令を調整し、リニアモータ622のサーボ制御をオフにしてもステージの位置ずれを発生させないような最適なブレーキ駆動指令を求め、これをブレーキ制御パラメータ記憶手段641に記憶する。さらに、同じそれぞれの位置決めすべき点に再度ステージを位置決めする際、ステージを移動、停止した後に、記憶した最適なブレーキ駆動指令をブレーキ機構に対して出力し、高精度な位置決めを行う。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】位置決め過程の位置精度を向上させる位置決め制御ユニット、位置決め制御方法および位置決め制御プログラムを提供する。
【解決手段】位置決め制御ユニット100は、特定の位置決め速度に基づいて1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させ、位置検出を伴う閉ループでステージの位置決めを制御する。1制御周期あたりの操作量を制御することで、位置決め動作による振動を抑制することができる。その結果、位置決めの精度を向上させることができる。
(もっと読む)
傾動装置
【課題】傾動台の中心を傾動中心とすることが可能であり、しかも傾装置を大型化させずに傾動台の傾動角度を大きくすることができる。
【解決手段】傾動装置1は、基台3に対して傾動台2を傾動可能に支持する傾動台支持部4と、基台3の上面3aに対して略平行となる方向に延在し、その延在方向に伸縮可能な一対の圧電素子5と、各圧電素子5の伸縮による第1の変位を自身の変形により基台3の上面3aに略直交する方向に拡大させるとともに、この拡大による第2の変位を傾動台2に伝えるV溝部66を有する変位拡大部材6とを備えている。傾動台支持部4は、支柱41と、支柱41に対して第1軸線を中心にして回転可能に支持された回動リングとを有し、傾動台2が回動リングに対して第2軸線を中心にして回転可能に支持される構成とした。
(もっと読む)
ステージの位置決め装置
【課題】ガイドに移動可能係合したステージの位置決め装置に関し、ステージの可動範囲の全域にわたってnmオーダの位置決めが可能なステージ移動装置を提供することを課題とする。
【解決手段】Xステージ13に設けられた送りナット(ナット部材)8と、送りナット8に螺合するボールねじ7と、ボールねじ7を回転駆動する超音波リニアモータ37とで構成する。更に、ナット8と、ボールねじ7のねじ軸7aとの間に予圧が発生するように、予圧発生手段を設ける。
(もっと読む)
位置決め装置
【課題】電気機械変換素子の基準位置のずれによる移動体の位置決め誤差の小さい位置決め装置を提供する。
【解決手段】印加した電圧に応じて伸縮する電気機械変換素子と、電気機械変換素子の一端に固定され、電気機械変換素子の伸縮によって往復移動する振動部材と、振動部材に摩擦係合し、振動部材上で滑り変位可能な摩擦係合部材と、振動部材を摺動可能に保持する軸支部と、電気機械変換素子の他端を保持する固定部とを備えるベース部材と、電気機械変換素子に、駆動電圧を印加できる駆動回路とを有する位置決め装置において、駆動電圧を、摩擦係合部材を振動部材に対して滑り変位させずに所望の位置に位置決めするのに必要な直流電圧成分に、交流電圧成分を重畳したものとする。
(もっと読む)
位置決めシステムおよび方法
本発明は固定ベース(2)、物体のためのサポート(3)、固定ベース(2)に対してサポート(3)を配置するのに力を加えるためのアクチュエータ(4)、サポート(3)上の荷重を測定するためのセンサ(5)、およびサポート(3)の位置を制御および/またはシステム(1)の少なくとも1つの共振周波数を減衰するために測定された荷重を処理するための制御装置(6)を含む物体を位置決めするためのシステム(1)を提供する。本発明はまた、システム(1)を制御するための方法(10)を提供する。 (もっと読む)
ワーク移動装置及び円柱状ワークの調芯装置
【課題】本発明は、位置決めの正確性を低下させずに処理速度を迅速化可能なワーク位置決め装置及び円柱状ワークの調芯装置を提供することを目的としている。
【解決手段】本発明に係わるワーク移動装置は、ワークを一の方向に移動させるためのワーク移動装置であって、ワークを一面に載置する載置手段と、空気圧で押圧され一の方向に移動する推進部材を有するとともに推進部材の先端がワークを望む状態で配置された空気圧アクチュエータと、推進部材に取り付けられた圧電素子と、ワークに当接可能に圧電素子に取り付けられた衝撃体と、ワークの位置を検出する検出手段と、空気圧アクチュエータへ供給される空気の空気圧を調整する空気圧調整手段とを備え、空気圧調整手段は、位置検出手段の検出したワークの位置とワークが位置すべき所望の位置との偏差に基づいて前記一の方向に推進部材を押圧する場合の空気圧を調整することを特徴としている。
(もっと読む)
傾斜調整機構およびこの傾斜調整機構の制御方法
【課題】ステージの傾きを高精度に調整できるとともに、ステージに加えることのできる加圧力の増大を図ることのできる技術を提供する。
【解決手段】少なくともステージ21の傾斜調整時には、半球体22と球面軸受23とが離間するように各圧電素子24a,24b,24cを伸縮するため、圧電素子の伸縮によりステージ21の傾きを調整するときに、球面軸受23が半球体22と接触することに起因する摩擦力等の外乱が生じることが一切ないので、滑らかな動作により非常に高精度にステージ21の傾きを調整できる。また、球面軸受23が半球体22と接離自在に面接触してステージ21を支持しているため、ステージ21に高加圧力が加えられたとしても、球面軸受23が半球体22を下方から面で支持することにより確実にステージ21を支持することができ、ステージ21に加えることのできる加圧力の増大を図ることができる。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】D/A変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決めを制御する位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を、1制御周期の積分値が等しくなるように、時間的に分割して所定分解能で出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ所定分解能で変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させることで、ステージの位置決めを制御する。これにより、D/A変換の精度をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。
(もっと読む)
位置決め装置
【課題】摩擦駆動方式の駆動装置によって、誤差のないウォブリングを行い、検出出力が最大となるように移動部材を正確に位置決めできる位置決め装置を提供する。
【解決手段】圧電素子の伸縮により振動部材を往復変位させて摩擦係合部材をすべり変位させる駆動装置によって、移動部材を駆動し、移動部材の位置に応じて変化する検出出力を最大にするように移動部材を駆動する位置決め装置において、摩擦係合部材が振動部材に対してすべり変位しないように緩慢に電圧を変化させて正方向および負方向に所定の電圧を印加し、正方向の電圧を印加したときの検出出力と負方向の電圧を印加したときの検出出力との差分に所定の係数をかけた移動量だけ摩擦係合部材を振動部材に対してすべり変位させられる駆動電圧を圧電素子に印加する。
(もっと読む)
ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法
【課題】低振動でドリフトが小さく高精度の位置決めを行える電子顕微鏡用ステージ機構を実現する。
【解決手段】ステージの駆動機構に超音波モータを用いるとともに、停止剛性を高める固定機構をモータと一体化する。すなわち、与圧機構に超音波モータと共に固定機構のピエゾ素子をマウントする構造を用い、ステージの加速減速及び位置決めを駆動機構で行った後、固定機構によりステージを固定する際、ステージの両側に位置するピエゾ素子が伸長し、ステージを押圧するように構成する。
(もっと読む)
被調整面の角度調整装置
【課題】被調整面の角度調整を行う角度調整装置において、応答性が良く、演算が簡単で回路構成を簡単にして安価に構成することができるようにする。
【解決手段】入力信号に応答して作動し、被調整面10に力を印加する3つのアクチュエータ12A、12B、12Cと、被調整面10の変位を検出する3つの変位検出装置14A、14B、14Cと、を備えており、3つの変位検出装置14A、14B、14Cは、3つのアクチュエータ12A、12B、12Cのうちの1つのアクチュエータが作動したときに、2つの変位検出装置はその力の印加に対する打撃中心軸上に配置され、残りの1つの変位検出装置のみが該打撃中心軸上以外の位置に配置される関係となるように、それぞれ配置される。
(もっと読む)
圧電素子の急速変形に伴う衝撃力を利用した小型精密位置決め装置
【課題】衝撃体の摺動面に与えられる摩擦力の影響を最小限にし、運動エネルギーを効率的に利用することができる圧電素子の急速変形に伴う衝撃力を利用した小型精密位置決め装置を提供する。
【解決手段】 圧電素子22の一方側に取り付けられる慣性体21と、圧電素子22のもう一方側に取り付けられる衝撃体23と、慣性体21と衝撃体23の移動方向に予圧を与え、ケース27に取り付けられた衝撃体移動方向予圧手段24と、慣性体21及び衝撃体23をガイドする案内手段25、26と、圧電素子22に外部より電圧パターンを与える手段と、を具備し、ケース27がベース29に固定されている。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被案内体の案内体に対する位置決め精度を向上することができる位置決め装置、及び位置決め方法を得る。
【解決手段】位置決め装置10は、ガイドブロック28がガイドレール26に対し所定軌道を運動可能となるように転動体を介して支持されて構成されたリニアガイド14と、ガイドブロック28に移動力を付与するサーボ機構18と、ガイドレール26及びガイドブロック28に超音波振動を付加するための加振装置22と、加振装置22及びサーボ機構18を制御する制御装置24とを備える。制御装置24は、ガイドブロック28のガイドレール26に対する位置決めが完了する前に、加振装置22を作動してガイドレール26、ガイドブロック28に超音波振動を付加させ、かつガイドブロック28のガイドレール26に対する位置決めが完了する直前に、ガイドレール26、ガイドブロック28への超音波振動の付加を停止する。
(もっと読む)
サブナノ〜ナノメートル範囲の高位置分解能を有する調節装置
本発明は、主操作方向についてはそれぞれの位置を高分解能センサにより測定可能で閉ループ制御回路のPZT固体アクチュエータを用い、PZT固体アクチュエータがジョイント2を介してプラットフォームに接続している、数マイクロメートルから数100ミリメートルの移動距離でサブナノ〜ナノメートル範囲の高位置分解能を有する調節装置に関する。本発明によれば、各位置での垂直方向の位置誤差の補正のため、圧電体単結晶を用いた追加アクチュエータ5が設けられる。単結晶はエラーテーブル内に保存された値に従って駆動され、各制御値は主制御軸の、勾配符号が反転された関数として算出され、追加アクチュエータは補正プレート4にて調整装置のプラットフォームに接続されている。  (もっと読む)
(もっと読む)
1 - 20 / 30
[ Back to top ]