
Fターム[5H303EE07]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 任意の位置が設定可能であるもの (87)
Fターム[5H303EE07]の下位に属するFターム
Fターム[5H303EE07]に分類される特許
61 - 78 / 78
位置検出方法および位置合わせ方法

【課題】矩形状の検出対象物の位置とその向き検出して基準位置への位置合わせを効率的に、しかも高精度に行うことのできる位置検出方法および位置合わせ方法を提供する。
【解決手段】検出対象物の一辺のエッジ位置をそれぞれ検出する第1および第2のラインセンサの出力から前記検出対象物の向きのずれ角を求め、求められた検出対象物のずれ角と前記第1〜第3のラインセンサの出力とから前記ずれ角を補正後における前記検出対象物の各軸方向へのずれ量を求める。そしてx軸およびy軸方向のずれ量X,Yとずれ角θとを3軸同時に制御する。
(もっと読む)
基板検査装置

【課題】より高精度な検査面の位置を保つ基板検査装置を提供する。
【解決手段】基板101を検査する基板検査装置において、水平方向に移動するXYステージ121と、XYステージ121上に配置され、上下方向に移動するZステージ103と、Zステージ103を3箇所で上下方向に移動させる圧電素子を有する3つのアクチュエータ機構107a、107b、107c、およびZステージ103を支持する弾性ヒンジ108を備えた。また、Zステージ103上には基板101の中心を仮想中心軸として回転方向に移動するθステージ106が配置され、直線方向に移動するロッド308と、ロッド308に接続され弾性変形しながらθステージ106を回転させる弾性部材113とを備える。
(もっと読む)
モータ制御方法及びモータ制御装置
【課題】 駆動対象を駆動するモータを速度フィードバック制御するにあたり、減速期間中の再加速の発生を防ぎ、再加速発生に起因して生じる騒音の発生を防止する。
【解決手段】 定速駆動状態から減速させて停止させるまでの減速期間において、速度フィードバック制御部へ入力する速度指令として、位置フィードバック制御により得られた速度指令ではなく、減速期間開始時からの経過時間の関数である減速関数を用いて得られた減速指令を用いる。この減速関数は、それ自体が単調減少するものであって、且つ、その導関数が単調関数若しくは定数となるような関数である。このような減速関数に基づいて生成される減速指令によりキャリッジを駆動させると、減速中に再加速することがなく、安定して速度が低下していく。そのため、キャリッジのメカ的なガタに起因する騒音発生も防止される。
(もっと読む)
磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置
本発明は、永久磁石の磁力による予圧を発生させ、予圧に作用される磁力を変化させ、定圧ベアリングの浮上間隙を調整することのできる、磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置を提供するものである。このために、本発明の構成は、テーブルと向い合う一側面にだけガイド面が形成されるガイドと、前記ガイド面と対応するように定圧ベアリングパッドが配置されるテーブルと、前記ガイドとテーブルの間に予圧を発生させる磁気予圧装置と、前記磁気予圧装置を制御する制御器及び該当電流を印加させる電力増幅器の具備された運動誤差補償制御手段とを含み、前記磁気予圧装置は、永久磁石と、前記永久磁石の磁力線と同一線上に位置するコアに巻線される電磁石コイルから成り、前記磁気予圧装置が定圧ベアリングパッドとガイドの間で予圧に作用して、磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置を提供する。従って、本発明は、両面パッド型から単面パッド型に構造が改善されることによって、テーブルとガイドの単純化を図る一方、浮上間隙の誤差を補正して、定圧ベアリングガイドの運動誤差を減少させることができる効果がある。 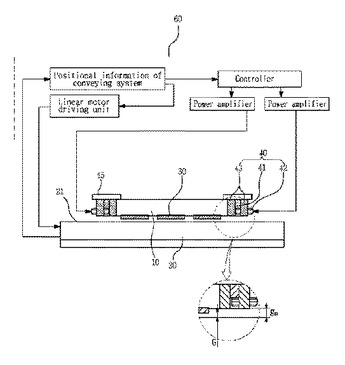 (もっと読む)
(もっと読む)
電子カム制御装置
【課題】カムの基準位置であるストローク下死点を電子カム動作を行いながら動的に変更させること。
【解決手段】ストローク下死点位置を変更するための加算移動データを設定する加算移動量設定部9と、ストローク下死点変更指令が入力されると、カム位置決め量Aに、ストローク下死点設定部8に設定されたストローク下死点位置および加算移動量設定部9に設定された加算移動データに対応する加算移動量を逐次加算し、この加算結果を出力軸に対する位置指令値として順次出力する位置指令算出部12と、ストローク下死点変更指令が入力されると、ストローク下死点設定部8に設定されたストローク下死点位置に加算移動量設定部9に設定された加算移動データに対応する加算移動量を逐次加算し、この加算結果でストローク下死点設定部8に設定されたストローク下死点位置を順次更新するストローク下死点変更部11とを備える。
(もっと読む)
位置決め装置および位置決めステージの制御方法
【課題】 簡単な構成で位置決め精度を向上させる。
【解決手段】 圧電アクチュエータの変位に応じて移動する位置決めステージ10と、位置決めステージ10の位置変化を静電容量の変化として検出する静電容量型位置検出センサ11と、静電容量型位置検出センサから出力された検出値を、位置決めステージの現在位置を示す数値に変換するセンサアンプ12と、ホスト14から入力された位置指令値と位置決めステージの実際の移動位置との差分値に対し、大きさが概略同等で符号が逆である補正値を、位置決めステージの現在位置を示す数値に加算して修正値を出力する補正部13dと、位置指令値および修正値に基づいて位置決めステージの変位量を決定し、圧電アクチュエータを駆動させることにより位置決めステージを移動させる位置決めコントローラ13と、を備える。
(もっと読む)
モーションコントロールシステム
【課題】リアルタイム性が保証出来ないようなローコストなモーションコントローラを使ってもモーションコントロールシステムを構築できるようにする。
【解決手段】サーボドライブ50、60がデータチェック処理をするとき、通信エラーを検出しても、その検出回数がパラメータ格納部505、605に設定した許容エラー回数まではエラー処理部506、606の処理を実行させず、指令データの平均化処理を行う。
(もっと読む)
電動機制御装置およびその機械特性測定方法並びに制御器調整方法
【課題】機械特性を測定して制御器の安定度を把握し、機械特性に合わせて制御器を最適に調整可能な電動機制御装置および機械特性測定方法、制御器調整方法を提供する。
【解決手段】 電動機1または機械5の動作量を検出する検出手段2と、指令信号を発生する指令器4と、指令信号を受けて電動機1を駆動するための制御器3と、電流制御部6と、を備えた電動機制御装置において、外乱入力する指令を生成する外乱信号発生部7と、制御器3が出力する駆動力を検出する駆動力検出手段8と、閉ループ外乱周波数応答特性を算出する閉ループ外乱周波数応答特性算出手段10と、該外乱信号発生部7の出力と駆動力検出手段8の出力から閉ループ駆動力周波数応答特性を算出する閉ループ駆動力周波数応答特性算出手段11と、該閉ループ駆動力周波数応答特性と該閉ループ外乱周波数応答特性から、機械特性を算出する機械特性算出手段13と、を備えている。
(もっと読む)
数値制御装置
【課題】 学習制御実行区間に、動作パターンが変更されるような指令や信号入力がないかチェックできる数値制御装置を提供する。
【解決手段】 数値制御装置は、加工プログラムを順次読み込み(S1)、学習制御開始指令が読み込まれ、学習制御終了指令が読み込まれるまでフラグFを「1」にセットする(S2,S9,S3,S10)。このフラグFが「1」にセットされている学習制御区間において、動作パターンを変更するような学習中に不適切な指令や信号入力がないか判断する(S5,S6)。このような指令や信号入力があると、アラーム停止またはフィードホールド停止し、停止の原因を表示し、学習制御を無効にする(S11〜S13)。学習中に不適切な指令や信号入力があると、停止し原因が表示されるから、加工プログラムの修正作業が容易となる。これにより学習制御に起因する誤切削等を防止することができる。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 少ない計算量で、外乱抑圧特性を向上させるだけでなく、完全に位置指令θrとアーム位置θaを一致させることができるサーボ制御装置を提供する。
【解決手段】 制御対象の制御量xdが指令refに一致するようにフィードバック制御器と、フィードフォワード制御器と、オブザーバとを備えたサーボ制御装置において、フィードバック制御器は、オブザーバによる状態量推定値shにゲインGを乗じたものを第2の操作量tfb2にフィードバックする構成であり、フィードフォワード制御器は、操作量trefから前記制御量xdまでの伝達関数P1の逆関数P1−1および、制御対象の状態量を検出する検出器の出力xfbから制御量xdまでの伝達関数P2の逆関数P2−1を含むようにした。
(もっと読む)
回転軸の制御装置
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
(もっと読む)
駆動制御装置
【課題】 加速度センサの動作及び取付け方向についての異常の有無を判定することができる駆動制御装置を提供する。
【解決手段】 駆動装置10を介して被駆動体12の動作を制御する駆動制御装置が、被駆動体の位置又は速度を検出する位置又は速度検出手段20,22と、被駆動体に取り付けられ、位置又は速度検出手段とは別に被駆動体の加速度を検出する加速度検出手段26とに加えて、加速度検出手段からの加速度情報に基づいて加速度検出手段の動作又は被駆動体への取付けについての異常の有無を判定する判定手段130を具備するように構成される。判定手段からの判定情報が異常を示すときには、加速度検出手段からの加速度情報を使用することなく、位置又は速度検出手段からの位置又は速度に基づいて、被駆動体の動作を制御する。
(もっと読む)
立体形状再生装置および立体形状記録再生装置
【課題】移動物体に対しても適用可能であり、精度の高い立体形状を簡易かつ迅速に再生し、さらには立体形状を測定し、再生することができること。
【解決手段】三角形の各辺上に配置され、電気的変位量を機械的変位量に変換する駆動素子と、各駆動素子に電気的変位量を与えて各駆動素子を機械的に変位させる駆動制御を行う制御手段とを備え、立体形状を簡易かつ迅速に再生する。また、三角形の各辺上に配置され、機械的変位量を電気的変位量に変換する検出素子を併用して、立体形状を測定し、再生する。
(もっと読む)
位置決め制御装置
【課題】 位置制御時の速度超過やオーバーシュートを抑制しつつ位置決め時間を短縮でき、制御応答が低い場合においても安定した制御ができる位置決め制御装置を得る。
【解決手段】 サーボ制御に理想的なモデルトルク、モデル速度、モデル位置を出力するモデル演算部1と、モデル位置と実位置との位置偏差に対して位置制御ゲインを掛けて速度指令を演算する位置比例補償手段3aと、この速度指令およびモデル速度と実速度の偏差に対してフィードバックトルク指令を出力する速度比例積分補償手段5,6,7と、このフィードバックトルク指令にモデルトルクを加算した加算値を予め設定されたトルク制限値で制限してモータを駆動するトルク指令として出力するトルク制限手段9と、を備え、位置比例補償手段3aは、動作中にモデル速度の多項式に基づいて位置制御ゲインを連続的に変化させる。
(もっと読む)
サーボ制御装置およびサーボ制御方法
【課題】指令の遅れがなく負荷の機械振動、あるいは負荷の制御振動を抑えることができるサーボ制御装置およびサーボ制御方法を提供する。
【解決手段】サーボ制御装置は、時間で変化する関数であり、負荷にあわせた、すなわち負荷の機械振動、あるいは負荷の制御振動を抑える関数である指令関数xを用いて、指令の速度や移動量に応じて、ある時間ごとの位置指令の差分又は速度指令を作成するための指令関数作成手段12を有し、指令関数作成手段12は加減速プロファイルを作成する時に指令関数xを用いて行い、加速時間以内で加速、指令速度以上で指令速度とし、移動量の残りが減速距離以下で減速とする指令を算出する。
(もっと読む)
XYステージ
【課題】 スライダ部の加速時、減速時、定速移動時の振動発生時にピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 スライダ部を2次元方向に位置制御するXYステージにおいて、スライダ部のピッチング角速度を検出するための信号を出力する第1のZ軸センサと、スライダ部のローリング角速度を検出するための信号を出力する第2のZ軸センサとを有することを特徴とするXYステージである。
(もっと読む)
出力電流制御装置、ステージ装置、露光装置、およびこの露光装置により製造したデバイスおよびデバイスの製造方法
【課題】 リニア増幅器とPWM増幅器を効率よく組み合わせた出力電流制御装置、この出力電流制御装置を使用したステージ装置および露光装置を提供すること。
【解決手段】 出力電流に応じてリニア増幅器105とPWM増幅器104とを使い分け、出力電流検出器R5、107と比較器106とを共通に使用する。
(もっと読む)
磁気浮上装置
【課題】 磁気浮上装置を特殊な構造としたり、特殊な加工を施すことなく、且つ特別なメンテナンスを必要とせず、制御対象体の温度を検出できる、装置の安全な運転を確保できる磁気浮上装置を提供すること。
【解決手段】 相対向して配置された一対の電磁石11、13と、該一対の電磁石11、13の間に配置された制御対象体15と、相対向して配置され該制御対象体15の位置変位を検出する位置変位検出センサ12、14を具備し、該位置変位検出センサ12、14の検出信号を位相補償及びゲイン調整する制御回路部20に入力し、該制御回路部20からの制御出力で、一対の電磁石11、13の磁気吸引力或いは磁気反発力を制御し、制御対象体15を該一対の電磁石11、13間の任意の位置に非接触で浮上支持制御する磁気浮上装置において、位置変位検出センサ12、14の検出信号により、制御対象体15の外形寸法を検出し該制御対象体の温度を検出する温度演算回路部30を設けた。
(もっと読む)
61 - 78 / 78
[ Back to top ]