
Fターム[5H303KK35]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 制御モードの切り換えを行うもの (63)
Fターム[5H303KK35]の下位に属するFターム
演算パラメータの変更 (17)
利用する検出信号の変更、追加 (8)
Fターム[5H303KK35]に分類される特許
1 - 20 / 38
モータ制御装置及び画像形成装置
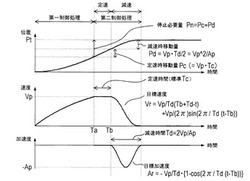
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
位置決め装置及び位置決め方法

【課題】高速かつ高精度に位置決めすることが可能な位置決め装置を提供する。
【解決手段】外乱相殺信号生成部において、粗動機構アクチュエータ電流センサによって検出される粗動機構アクチュエータ駆動電流信号と粗動機構から提供される粗動機構センサ信号とから粗動機構を駆動する力またはトルクを求めるとともに、さらにこの粗動機構の駆動力または駆動トルクと、粗動機構及び微動機構のセンサ信号と、機構パラメータ記憶部に記憶された粗動機構及び微動機構に関する機構パラメータとから、粗動機構の動作により微動機構に発生する外乱量を求め、この外乱量を打消すための外乱相殺信号を生成して微動機構制御信号に加算する位置決め装置を提供する。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
移動体駆動制御システムの異常監視装置
【課題】コンピュータ(CPU)で制御するサーボ系において、コンピュータの異常検出遅れ時間の短縮、異常検出からサーボモータの減速停止動作開始までの空走時間の短縮及び異常停止時のショック軽減を実現できるようにする。
【解決手段】移動体駆動制御システムは、サーボモータ11を駆動するサーボアンプ12と、該サーボアンプ12に速度指令を出力するサーボ指令部13と、サーボ指令部13を制御するCPU(コンピュータ)14とから構成されている。サーボ指令部13内には、CPU14の動作が異常になっていないか否かを監視する異常監視手段22と、この異常監視手段22によりCPU14の異常が検出されたときに所定の減速停止プロファイルに従ってサーボモータ11を減速して停止させるようにサーボアンプ12に出力する速度指令を変化させる異常時減速停止手段23としての機能が組み込まれている。
(もっと読む)
サーボ制御システムおよび作業機械
【課題】機械要素の増加を抑えつつバックラッシュによる影響を低減できるサーボ制御システムおよび作業機械を提供する。
【解決手段】サーボ制御システム80は、回転体4に連結された第1の歯車71と、第1の歯車71と噛み合い、第1の歯車71を駆動する第2の歯車72と、第2の歯車72を駆動する旋回用電動機21と、旋回用電動機21の動作を制御する旋回駆動制御部40とを備え、旋回駆動制御部40は、旋回用電動機21の出力トルクを制限するための旋回制限部41を有しており、旋回制限部41は、旋回用電動機21の静止状態から回転動作への移行、旋回用電動機21の回転速度の減速、または旋回用電動機21の回転方向の変更を行う際に、第1の歯車71及び第2の歯車72におけるバックラッシュ幅を第2の歯車72が移動する際に要する時間に相当する所定時間が経過するまでの間、旋回用電動機21の出力トルクを制限する。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
同期制御装置
【課題】回転軸である追従軸が回転軸である被追従軸に同期する制御を行う同期制御装置を提供すること。
【解決手段】追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、1回転の移動量で丸めた目標位置との遅れ量を挽回するために更に加速してから減速させる制御を行う。追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、追従軸xの1回転の移動量で丸めた被追従軸yに対する目標位置との遅れ量は面積S4で表され、追従軸xを時間t5まで加速しその後時間t6まで減速する。従来方式による追従軸xの加減速方法に比較し、同期完了までの時間が(t4−t6)の長さ短縮されている。また、追従軸xの最大速度Vcmaxも従来方式に比べて遅い速度である。
(もっと読む)
ステージの位置決め装置
【課題】ガイドに移動可能係合したステージの位置決め装置に関し、ステージの可動範囲の全域にわたってnmオーダの位置決めが可能なステージ移動装置を提供することを課題とする。
【解決手段】Xステージ13に設けられた送りナット(ナット部材)8と、送りナット8に螺合するボールねじ7と、ボールねじ7を回転駆動する超音波リニアモータ37とで構成する。更に、ナット8と、ボールねじ7のねじ軸7aとの間に予圧が発生するように、予圧発生手段を設ける。
(もっと読む)
制御装置
【課題】二重ジンバル機構においてインナージンバルとアウタージンバルの駆動制御を行う制御装置に関し、アウタージンバルとインナージンバル間の衝突や視軸変動の発生を抑止する。
【解決手段】アウタージンバルとインナージンバルを有する二重多軸ジンバルの駆動制御を行う制御装置であって、ジョイスティク51からのアウター用基準指令値とアウター速度センサ24の出力値との偏差であるアウター偏差値に基づきアウタージンバルを駆動制御するアウター制御部60Aと、中心角度指令値とインナー角度センサ36の出力値との偏差であるインナー偏差値とに基づきインナージンバルを駆動制御するインナー制御部70Aと、ジョイスティク51から指向操作によりアウター用基準指令値が入力されている時、前記インナー偏差値をアウター制御部60Aに反映させる補正手段(差角指令補償器82,加算器83)を設ける。
(もっと読む)
ワーク移動装置及び円柱状ワークの調芯装置
【課題】本発明は、位置決めの正確性を低下させずに処理速度を迅速化可能なワーク位置決め装置及び円柱状ワークの調芯装置を提供することを目的としている。
【解決手段】本発明に係わるワーク移動装置は、ワークを一の方向に移動させるためのワーク移動装置であって、ワークを一面に載置する載置手段と、空気圧で押圧され一の方向に移動する推進部材を有するとともに推進部材の先端がワークを望む状態で配置された空気圧アクチュエータと、推進部材に取り付けられた圧電素子と、ワークに当接可能に圧電素子に取り付けられた衝撃体と、ワークの位置を検出する検出手段と、空気圧アクチュエータへ供給される空気の空気圧を調整する空気圧調整手段とを備え、空気圧調整手段は、位置検出手段の検出したワークの位置とワークが位置すべき所望の位置との偏差に基づいて前記一の方向に推進部材を押圧する場合の空気圧を調整することを特徴としている。
(もっと読む)
フィードフォワード信号を用いたディジタルサーボ制御装置
【課題】 モータ動作中の位置偏差を小さく、または、モータ位置決め時のオーバーシュート量を小さくすることができた、更に、モータ動作中の速度またはトルクフィードフォワード信号が量子化誤差の影響によるばたつきを低減して、モータが一定速度で動作している時の騒音を小さくすることができるフィードフォワード信号を用いたディジタルサーボ制御装置を提供する。
【解決手段】 フィードフォワード制御系が、位置指令に基づいて速度フィードフォワード信号vff0を生成する速度フィードフォワード作成部6と、前記位置指令に基づいてトルクフィードフォワード信号tffを生成するトルクフィードフォワード作成部8と、前記速度フィードフォワード信号vffおよび前記トルクフィードフォワード信号tffに基づいて速度フィードフォワード変更信号vffを生成する速度フィードフォワード変更部7と、を備える。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
アクチュエータおよび制御方法
【課題】非線型特性によるサーボ弁の制御性低下を防止する。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排気部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の少なくとも一方から作動流体を排気させる排気弁と、位置検出器が検出する位置が所与の目標位置に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
記録装置
【課題】 記録装置において、キャリッジの減速時に、モータの逆起電力のためにモータに流す電流の最小値が制限される。このために、振動や騒音が発生しやすい。
【解決手段】 キャリッジの減速時に、キャリッジの移動量と目標軌道とのいずれか一方あるいは両方が、所定の閾値よりも絶対値で大きい場合は、モータドライバへの入力信号を所定の値で保持する。
(もっと読む)
電子カム制御装置
【課題】位置指令値の急激な変動を抑えて、速度超過によるエラーが発生、機械機構への衝撃を防止すること。
【解決手段】カム角度とストローク比との関係が設定されるカムテーブルと、ストローク量が設定されるストローク量設定部と、入力軸の位置情報をカム角度に変換し、カムテーブルの設定内容およびストローク量設定部のストローク設定値に基づき、変換したカム角度に対応するカム位置決め量を求め、カム位置決め量を出力軸に対する位置指令値として出力する制御部とを備え、制御部は、ストローク設定部の設定変更要求がストローク比の最大位置時点より以前に入力された場合は、ストロークの変更を設定変更要求時点とストローク比の最大位置時点との間で徐々に実行し、設定変更要求がストローク比の最大位置時点より以後に入力された場合は、ストロークの変更を前記ストローク比の最小位置時点で実行する。
(もっと読む)
フィードフォワード制御装置
【課題】フィードフォワード制御定数を簡単かつ正確に同定する。
【解決手段】電流制御・モータ・機械系150は、フィードバック制御器100によりフィードバック制御されると共に、フィードフォワード制御器200によりフィードフォワード制御される。フィードフォワード制御器200には、Σcisiで定義される微分級数式が設定されている。フィードフォワード定数決定装置300は、時間の経過と共に角速度が変化する同定用位置指令信号r(=Asinωt)及び同定用速度指令信号rv1(=Av1sinωv1t)をフィードバック制御器200に入力し、この時の誤差eをフーリエ演算して位置制御系と速度制御系における誤差eのフーリエ係数を求め、このフーリエ級数から、定数を算出する。
(もっと読む)
運動制御システムにおいて終了条件を満たす方法およびシステム
経路計画の終了条件を満たすシステムおよび方法の一実施形態は、経路計画において経過した総時間を追跡しながら(22)、経路計画に関する指令を連続して生成する(21)経路生成器(4)を利用している。この経路生成器は、経路計画の残り時間を計算し、残り時間の長さがサンプル期間全体の長さに満たない場合(23)、その残り時間を経路計画の最終サンプル期間の長さの代用とする(24)。 (もっと読む)
位置決め制御装置及び位置決め制御方法
【課題】フィードバック装置を必要とせず、被制御体の位置決めを正確に達成でき、被制御体の位置決めがデッドポイント領域に入ることによる重大な損傷を避けられる。
【解決手段】位置決め制御装置及び位置決め制御方法であって、位置決め制御装置は、変位コマンド及び被制御体から出力した変位フィードバック信号を受け、被制御体の変位及び位置決めを制御する。上記位置決め制御装置は、第1の制御ループ、第2の制御ループ及び所定のデッドポイント値を有する仲裁モジュールを含む。第1の制御ループは、変位コマンド及び変位フィードバック信号に基づいて、被制御体の変位を制御する。第2の制御ループは、被制御体の位置決めを制御する。仲裁モジュールは、変位コマンド及び変位フィードバック信号と所定のデッドポイント値とを演算比較し、上記演算結果に基づいて第1の制御ループまたは第2の制御ループの動作を制御する。
(もっと読む)
位置決め制御装置とその制御方法
【課題】 機械位置のフルクローズドループ制御でありながら、モータ位置を制御した時と同等の応答性と機械位置を制御したときと同等の精度を得ることができる位置制御装置とその制御方法を提供する。
【解決手段】 位置指令とモータ位置信号とのモータ位置偏差から速度指令を生成する位置制御部(1)と、速度指令とフィードバック速度信号との速度偏差からトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するトルク制御部(3)と、モータ位置信号からモータ速度信号を生成するモータ速度信号生成部(4)と、モータ速度信号をフィードバック速度信号とするフィードバック速度信号生成部(5)と、を備えた位置決め制御装置において、位置指令と機械位置信号との機械位置偏差から補正位置指令を生成する補正位置制御部(6)と、補正位置指令をオンするスイッチと、オンオフされた補正位置指令と位置指令を加算して新たな位置指令を生成する加算器(17)と、を備えた。
(もっと読む)
1 - 20 / 38
[ Back to top ]