
Fターム[5H501AA02]の内容
Fターム[5H501AA02]に分類される特許
1 - 10 / 10
ピンチロールの速度制御装置及び速度制御システム
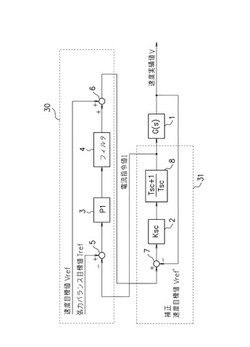
【課題】ピンチロールの速度制御において、操業中にピンチロールモータの速度制御系の不安定化によるハンチングを抑制することを目的とする。
【解決手段】ピンチロールの速度目標値と張力バランス目標値とを入力信号とし、第1のPI制御器を用いてピンチロールの補正速度目標値を出力する主幹制御部と、該補正速度目標値とピンチロールの速度実績値との第1の差分値を求め、該差分値を入力として第2のPI制御器によりピンチロールモータを駆動する電流指令値を求めるドライブ部とを具備し、主幹制御部は、張力バランス目標値と電流指令値との第2の差分値を求め、該第2の差分値を第1のPI制御器に入力し、その出力をローパスフィルタに入力し、該ローパスフィルタの出力と速度目標値とから補正速度目標値を出力する。
(もっと読む)
誘導電動機の制御装置及び制御方法

【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
モータ駆動装置およびトルクリップル除去方法
【課題】電流センサのオフセット電圧に起因するトルクリップルを簡便に低減する。
【解決手段】リップル演算器25は電流センサ17のオフセット電圧に起因して発生するdq軸の電流のリップル成分をレゾルバ15の出力値およびdq座標変換器19の出力値に基づいて演算する。リップル減算器41はリップル演算器25の演算結果に基づいてdq軸の電流からリップル成分を減じる。一方、オフセット電圧演算器31はオフセット電圧演算器31の演算結果に基づいて電流センサ17のオフセット電圧を演算する。オフセット電圧補償器33は電流センサ17の出力電圧からオフセット電圧演算結果を減じる。これにより、電流センサ17のオフセット電圧が自動補償され、電流センサ17のオフセット電圧に起因するトルクリップルが回転電動機11の回転に伴い減少する。
(もっと読む)
取鍋内壁のノロのハツリ装置
【課題】取鍋の内壁に付着残留したノロをブレーカを用いて削るに当たり、作業者を補助することが可能なハツリ装置を提供する。
【解決手段】ドラムがダイレクトドライブモータの正逆回転駆動によって正逆回転されるワイヤーロープがドラムに巻かれた巻上げ手段4と;巻上げ手段4のワイヤーロープの下端に装着され、錘によって垂直方向の力を付与されながらノロを削るハツリ手段5と;ハツリ手段5がワイヤーロープによって吊下げられている状態を維持するのに必要なダイレクトドライブモータのトルクを記憶するトルク記憶手段と;を備えていて、ダイレクトドライブモータにかかる荷重によるトルクが記憶したトルクより大きい場合には、ダイレクトドライブモータが逆転駆動してハツリ手段5を下降させ、ダイレクトドライブモータにかかる荷重によるトルクが記憶したトルクより小さい場合には、ダイレクトドライブモータが正転駆動してハツリ手段5を上昇させる。
(もっと読む)
繊維機械
【課題】回転速度にかかわらず効率良く正確に電気モータを制御できる繊維機械を提供する。
【解決手段】自動ワインダは、モータ51と、位置センサ56と、電流センサ70と、パルス検出部55と、モータ制御部52と、を備える。位置センサ56は、モータ51のロータ磁極位置を検出する。電流センサ70は、モータ51の電流を検出する。パルス検出部55は、モータ51の回転に応じたパルスを検出する。モータ制御部52は、モータ51の回転を制御する。また、モータ制御部52は、第1制御部71と、第2制御部72と、を備える。第1制御部71は、位置センサ56の検出結果及びパルス検出部55の検出結果に基づいてモータ51の回転を制御する。第2制御部72は、電流センサ70の検出結果に基づいてモータ51の回転を制御する。
(もっと読む)
電動機の制御装置及び方法
【課題】シート送り装置のスリップ及びバックラッシュを抑制し、かつ、シートをフィード設定長だけ搬送する電動機制御装置及び方法を提供する。
【解決手段】減算器47が測長ロールパルス数から送りロールパルス数を減算してパルス数偏差を求め、微分器47が時間微分して速度差を求め、BL/SL判別手段が速度差に基づいてバックラッシュ及びスリップの存在を判定する。バックラッシュ補正制御手段50が、パルス数偏差に基づいて、バックラッシュを抑制するための位相補正値を出力し、スリップ補正制御手段が、速度差に基づいて、スリップを抑制するための補正後フィーダ加速時間及びフィーダ減速ゲイン値を出力する。そして、主制御手段44が、位相補正値、補正後フィーダ加速時間及びフィーダ減速ゲイン値を用いてそれぞれ速度指令Qを求める。これにより、バックラッシュ、電動機6´の加速時のスリップ及び減速時のスリップをそれぞれ抑制する。
(もっと読む)
糸状巻線材を巻くための巻線機
糸状巻線材(1)を巻くための巻線機は、巻線用電動機(2)と位置決め駆動装置(9)と制御装置(10)を有している。その巻線用電動機(2)は電動機ハウジング(3)と電動機軸(4)を有し、この電動機軸(4)はその軸線(5)を中心として回転できる。電動機軸(4)は少なくとも1個の巻線(7)が配置される巻枠ホルダ(6)に相対的に回転不能に結合されている。巻線機は巻線(7)ごとに少なくとも1個の糸供給装置(8)を有し、この糸供給装置(8)によって、それぞれの巻線(7)に糸状巻線材(1)が供給される。電動機軸(4)のその軸線(5)を中心とした回転中に、位置決め駆動装置(9)によって、巻枠ホルダ(6)が電動機ハウジング(3)に対して軸線(5)に沿って軸方向に位置決めできる。制御装置(10)によって、巻線用電動機(2)と位置決め駆動装置(9)が協調して制御される。  (もっと読む)
(もっと読む)
テンション装置,巻線巻回装置および巻線巻回方法
【課題】急激な線材速度の加減速に追従可能であり、広い設定範囲で線材に所定のテンションを付与することができるテンション装置,巻線巻回装置,巻線巻回方法を提供する。
【解決手段】線材3をワーク側へ送り出す線材送出手段は、線材3を送り出す送りプーリ11と、これを回動させる送り速度制御用モータ12と、その回動速度を制御する速度制御部43を有し、線材3のテンションを所定値に制御するテンション制御手段は、シャトルプーリ13を移動させて線材3の移動経路長を変更するスライド用モータ15と、シャトルプーリ13の位置を検出する絶対値エンコーダ16と、線材3に掛かるテンションを検出するトルクセンサ17と、テンションを所定値に保持するように送り速度制御用モータ12を制御するテンション制御部42を有し、速度制御部43はシャトルプーリ13の位置に基づき送り速度制御用モータ12の回動速度を制御する。
(もっと読む)
フィルタ装置、及びそれを用いたフィードバック制御装置
【課題】入力信号のうちノイズ等の無用な高周波成分を低減させながら、制御すべき周波数帯域の位相遅れが小さいフィルタ装置、及びそれを用いたフィードバック制御装置を提供することを目的とする。
【解決手段】入力信号の高周波ノイズを低減するフィルタ装置であって、入力信号を位相遅れ処理して位相遅れ信号を出力する一次遅れフィルタ部と、前記入力信号を微分処理して微分信号を出力する微分特性処理部と、前記位相遅れ信号と前記微分信号を加算して出力信号を得る加算処理部とを備えることを特徴とするフィルタ装置、及びそれを用いたフィードバック制御装置。
(もっと読む)
電動機の制御方法及び装置
本発明は、制御ユニット(1)がパラメータ化の可能な速度コントローラ(26)及びパラメータ化の可能な補助コントローラ(28)を備え、可動機械部(7、8)の位置(29)を検出し、前記可動機械部(7、8)の位置を変化させるための電動機(5)を備えた電動機(5)の制御方法に関する。速度コントローラ(26)の少なくとも1つのパラメータ(31)および/又は補助コントローラ(28)の少なくとも1つのパラメータ(33)を可動機械部(7、8)の位置(29)に応じて変化させる。  (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]