
Fターム[5H501AA30]の内容
Fターム[5H501AA30]に分類される特許
1 - 20 / 160
モータ制御装置、歩行補助装置及びモータ制御方法
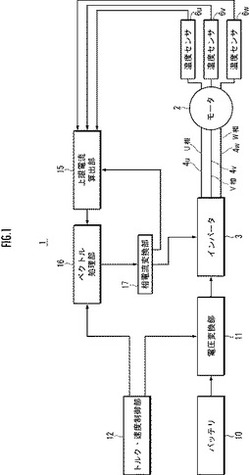
【課題】モータコイルの過熱を防止するモータ制御装置において、コイル温度が上限を超えないことを保証しつつ、コイル温度の上限を保証上限温度に十分近い値に設定して、コイル電流の制限に因るモータ性能の低下を抑止する。
【解決手段】上限電流算出部15は、温度センサ6u,6v,6wが検出した各相コイルの温度に基づいて各相において第1の所定時間後のコイル温度が上限温度以下に留まる上限値を、第1の所定時間より短い第2の所定時間の経過ごとに算出する。ベクトル処理部16は、目標コイル電流に対応する目標ベクトルの長さを、上限電流算出部15が算出した各相の上限値の内の最小のものに対応する長さ以内になるように補正する。相電流変換部17は、補正後の目標ベクトルに基づいて各相電流値を算出し、インバータ3を介してモータ2の各相電流を制御する。
(もっと読む)
可変速発電電動機の異常検出装置及び異常検出方法

【課題】 地絡発生前に警報を発して事故を未然に防止することができる可変速発電電動機の異常検出装置および異常検出方法を提供する。
【解決手段】 可変速発電電動機1の回転子2の回転位相および系統電圧位相に係る運転情報を取得する運転情報入力手段17と、可変速発電電動機1の運転中に発生する部分放電に起因した信号を含む1次信号を検出する部分放電センサ15aと、1次信号から部分放電の特徴を有する2次信号を検出する部分放電検出手段16と、2次信号と回転位相および系統電圧位相との同期性を比較することで、可変速発電電動機1の固定子コイル11の部分放電と回転子コイル6の部分放電とを識別する異常判定手段18とを備えた。
(もっと読む)
振動発生装置
【課題】 重心が偏った錘をモータで回転して振動を発生する振動発生装置において、モータが1回転する間の速度変化を効率良くできるように制御可能な振動発生装置を提供する。
【解決手段】 重心が偏った錘が回転軸に固定されたモータの回転速度変化をエンコーダから得て、予め設定された速度変化プロファイルPvと実際の速度情報との差を回復できるようにフィードバック制御が行われる。さらに、モータに発揮させる理想的なトルク変化プロファイルPtが使用され、フィードバックされた補正速度情報がトルク変化プロファイルPtに追従するように、フィードフォワード制御が行われる。これにより、モータを理想的な速度変化で駆動できるようになる。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
ファン制御装置
【課題】ファン制御装置において、広いファン回転速度調整範囲を確保しつつ、低回転速度域におけるファン回転について細かい制御速度を可能にすると共に、安定化させる。
【解決手段】ファン制御装置は、商用交流電源33が供給される一次コイル36と、商用交流電源33の電圧を複数段階で変圧するための複数の二次出力端子38a〜38eが設けられた二次コイル37とを有するトランス35と、複数の二次出力端子38a〜38dのいずれかを選択して、二次コイル37とファン4の駆動モータ19とを接続する接続手段40と、接続手段40が二次出力端子38eと駆動モータ19を接続しているときに、二次コイル37から駆動モータ19への通電電流を制御する通電電流制御手段56とを備える。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
電気推進システムにおける電動機制御方法
【課題】蓄電池とこの蓄電池を充電する発電機からなるハイブリッド電源を備えた電気推進システムにおいて、蓄電池電圧,電動機受電端電圧の異常低下を簡単かつ低コストに防止する。
【解決手段】電動機(M)6の入力電圧VMを検出器(VD)9により検出し、これが予め設定された制限開始設定電圧VMAを超えたら、予め設定されている回転速度(入力電流)制限線Yをもとに、速度指令制限部13により回転速度(入力電流)制限線を超えない回転速度を求め、これをもとに回転速度を制限して電動機(M)6を運転することで、掲記課題を装置の小型化,軽量化およびコストダウンにより実現する。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
駆動装置
【課題】モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにする。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
(もっと読む)
インペラの回転数制御方法
【課題】従来のインペラの回転数制御方法は、インペラの回転数を高めに設定するので、インペラが不必要に摩耗されてしまうことがあり、インペラの耐用回数が低下している。
【解決手段】制御装置5は、記憶装置7に記憶されている設定回転数X0でインペラ3を回転させているときに、電流測定装置6により測定された負荷電流値Iを読み取り、読み取った負荷電流値Iが、記憶装置7に記憶されている閾値I0未満であると判定した場合に、負荷電流値Iが閾値I0以上となるようにインペラ3の回転数を上昇させる。
(もっと読む)
制御弁の制御装置
【課題】電動アクチュエータから制御弁に付与される駆動力が微小変動するような状況を少なくし、電動アクチュエータの構成部品の磨耗や劣化の進行を抑制する。
【解決手段】電動アクチュエータ12によって駆動される制御弁10は所定の開度に付勢されている。その開度を制御する制御ユニット21は、制御弁10の目標開度と検出された開度との偏差に応じてアクチュエータ12を操作する。該偏差の絶対値が所定値よりも小さいという条件を少なくとも含む所定の必要条件が成立している場合に、アクチュエータ11への電源供給を遮断し、目標開度又は検出された開度と上記所定の開度との偏差の絶対値が所定値以上である場合には、アクチュエータ11の電源供給を継続する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
制御装置
【課題】 本発明は、例えばモータに自動車のエンジンの動作を模擬させたシステムにおけるモータの制御等、制御対象物の制御を行なう制御装置に関し、制御系の遅れ時間を高精度に補償した制御を行なう。
【解決手段】 制御対象物の動作速度を第1の角度に変換し、制御系の遅れ時間に相当する時間をその動作速度に応じた第2の角度に変換し、第1の角度と第2の角度とを加算して第3の角度を生成し、その第3の角度を、その制御対象物の制御対象要素を指令値通りに制御するための指令値に変換して、その指令値に基づいて制御対象物を制御する。
(もっと読む)
電動機制御装置
【課題】電動機をより適正に制御する。
【解決手段】モータ10の回転数Nmが大きいほど大きな変化中回転変化量Δθofsを用いて変換器34からの理想角θidを補正して得られる補正後理想角θidmoをインバータ12のスイッチング素子のスイッチング制御に用いる。これにより、電子制御ユニット40に入力された理想角θidをそのタイミングでレゾルバ装置22から出力された検出角θdetに対応する理想角に換算することができ、モータ10をより適正に駆動制御することができる。
(もっと読む)
電力波形表示システム
【課題】起動直後に過大な軸トルクが作用しても、各電力波形を適切に表示する。
【解決手段】
電力波形表示システム(10)は、電力取得手段(60,61,22〜24,30)と表示手段(53)とを有する。電力取得手段は、モータの起動直後の入力電力を測定可能な第1入力レンジに設定され、モータ動作期間のモータの入力電力を起動電力として取得し、モータ起動後の定常状態の入力電力を測定可能な第2入力レンジに設定され、モータ動作期間のモータの入力電力を定常電力として取得し、起動電力及び定常電力を、負荷時タップ切換装置の正常動作時と比較動作時とで取得する。表示手段は、正常動作時の起動電力に対応する第1起動電力波形と比較動作時の起動電力に対応する第2起動電力波形とを比較可能に表示し、正常動作時の定常電力に対応する第1定常電力波形と比較動作時の定常電力に対応する第2定常電力波形とを比較可能に表示する。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
モータ装置
【課題】給湯装置に使用されるファンを駆動するモータ装置に関する情報を早期に把握することができるモータ装置を提供することを課題とする。
【解決手段】給湯装置に使用されるファンを駆動するモータ装置であって、当該モータ装置の製造時期、製造数量、製造場所、工場名、製造担当者、形式、機種名、シリアル番号、ロット番号、ライン番号、及びメーカ名、のうちの少なくとも一つを含む当該モータ装置に関する情報を記憶した記憶部を備えたモータ装置。
(もっと読む)
自動製パン器
【課題】供給される交流電力の周波数の影響を簡易的に抑制する自動製パン器を提供する。
【解決手段】自動製パン器は、混練モータ50及び粉砕モータ60と、これらのモータを駆動するための交流電力を供給する電源部121aと、電源部121aが供給する交流電力の周波数を検知する電源周波数検知回路125と、上記のモータの駆動を制御する制御装置120と、を備える。制御装置120は、電源周波数検知手段125が検知する、電源部121aが供給する交流電力の周波数に応じて、上記のモータを駆動させる時間の長短を調整する。
(もっと読む)
1 - 20 / 160
[ Back to top ]