
Fターム[5H501GG11]の内容
Fターム[5H501GG11]に分類される特許
1 - 20 / 186
アクチュエータ制御装置及び方法
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
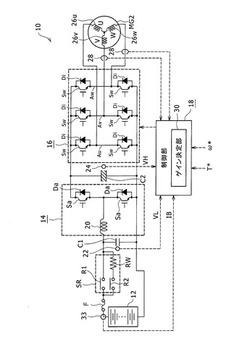
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法

【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
リラクタンス型同期電動機の制御装置
【課題】電動機回転子の磁気的な構造および材質の磁気特性に起因する電流−トルクの非線形領域を回避できる安定した制御性を持つ制御装置を提供する。
【解決手段】
制御装置は、上位制御装置から指令されるトルク指令値に比例するq軸電流振幅値を演算するq軸電流演算部と、前記トルク指令値に比例するd軸電流振幅値を演算するd軸電流演算部と、回転子速度に応じて変化するq軸電流係数、d軸電流係数をそれぞれ演算する速度係数演算部と、q軸電流振幅値とq軸電流係数、d軸電流振幅値とd軸電流係数をそれぞれ乗じることでq軸電流指令値およびd軸電流指令値とを算出し、d軸電流指令値に基づいた三角形補償関数又は台形補償関数によりq軸電流補償値を演算するq軸電流補償値演算部と、算出されたq軸電流補償値をq軸電流指令値に加算した補償後q軸電流指令値を出力する出力部と、を備える。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
電動機制御装置
【課題】駆動機構における慣性モーメント又は慣性質量、及び多慣性モデルのいずれも未知もしくは変動し得る場合でも、各種パラメータを調整することなくロバスト性の高い電動機の駆動制御を可能にする。
【解決手段】電流制御系ループにおいて、慣性変動抑制部3が第1外乱オブザーバ31を用いて推定した電動機200の外乱トルクを、第1トルク指令に加算して第2トルク指令を出力する。また、慣性変動抑制部3において外乱トルクを推定する第1外乱オブザーバ31が、電動機200の電動機速度に対応して駆動機構500の機械共振の影響を抑制した理想電動機の加減速トルク信号を出力する共振抑制モデル43を備えている。第1外乱オブザーバ31が、この理想電動機の加減速トルク信号を利用して外乱トルクを推定することで、慣性変動抑制部3は駆動機構500の機械共振に起因する振動を生じることなく駆動機構の慣性モーメントの変動を抑制する。
(もっと読む)
モータ制御装置
【課題】電流指令値が0(モータ停止)の場合に、出力電流ノイズに起因するモータの振動を抑制する。
【解決手段】モータに流れる電流値とモータの電気角と電流指令値とが入力され、それら電流指令値、電流値及び電気角を用いたフィードバック制御を行うことにより電圧指令値を算出し、その電圧指令値をPWM波形に変換してモータを駆動するインバータを制御するモータ制御信号を生成するモータ制御装置において、電流指令値が0か否かを検知する0指令検知部61を備え、0指令検知部61が0を検知した時、電圧指令値が入力されてモータ制御信号を生成するPWM変換部18’における電圧指令値に対する分解能を粗くする。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
制御装置、制御プログラム及び制御方法
【課題】適切な比例ゲインを算出することができる制御装置、制御プログラム及び制御方法を提供することである。
【解決手段】デューティー比に応じた回転速度でモーター16を動作させるための制御信号を生成する制御装置10。制御装置10は、時間T1でデューティー比をD1からD2に変化させて、D1からD2の間の各デューティー比に対応する複数の回転速度R1を得る。制御装置10は、時間T1よりも時間T2でデューティー比をD1からD2に変化させて、D1からD2の間の各デューティー比に対応する複数の回転速度R2を得る。制御装置10は、複数の回転速度R1及び複数の回転速度R2に基づいて、各回転速度R1に対応する比例ゲインKpを算出する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータ駆動装置
【課題】最適なゲイン設定ができるゲイン切換判定手段を有したモータ駆動装置を提供する。
【解決手段】トルク指令25どおりにモータを駆動させるよう制御する電流制御手段3と、ゲイン切換信号34で選択されたゲインで制御する速度フィードフォワード手段4と、ゲイン切換信号34で選択されたゲインで制御するトルクフィードフォワード手段5と、モータ速度30を算出する速度検出手段6と、位置指令速度31を算出する位置指令速度検出手段7と、ゲイン切換信号34をオン/オフするゲイン切換判定手段8と、判定遅延時間設定手段9と、判定閾値設定手段10とを有し、ゲイン切換判定手段8にて判定遅延時間32経過後の位置指令速度31の絶対値が判定閾値33以下であればゲイン切換信号34をオンし、判定閾値33より大きい場合はゲイン切換信号34をオフのままとする。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】モータや被駆動体の仕様の変更等に応じてモータの制御情報を容易に変更でき、利用者のニーズに応じて制御情報の設定をカスタマイズ可能な汎用性を持ったモータ制御装置及び画像形成装置を提供する。
【解決手段】モータ制御装置の記憶媒体11は、制御ゲインを書き換えるための外部入力データに基づいて制御ゲインを自在に書き換え可能な書き換え可能領域12と、外部入力データに基づく書き換えが禁止又は条件付きで許容された書き換え不可能領域13とを有する。また、外部入力データに基づいて、記憶媒体11の書き換え可能領域12に記憶されている制御ゲインを書き換えるモータ制御IC14を備える。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
1 - 20 / 186
[ Back to top ]