
Fターム[5H501JJ12]の内容
Fターム[5H501JJ12]の下位に属するFターム
プログラマブルカウンター回路 (4)
Fターム[5H501JJ12]に分類される特許
121 - 129 / 129
無端移動部材駆動制御装置及び画像形成装置と無端移動部材の移動速度制御方法
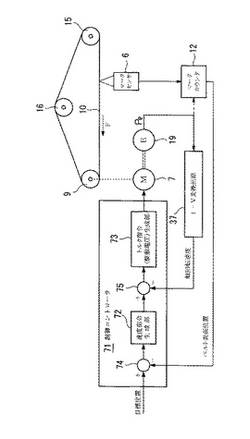
【課題】 無端移動部材をセンサの取付け誤差、およびマークのピッチ誤差や伸縮などの影響を受けずに、その移動速度を高精度に制御できるようにする。
【解決手段】 無端移動部材である中間転写ベルト10の表面に形成した等間隔で連続する多数のマークをマークセンサ6で検出し、その検出信号をマークカウンタ12によってカウントして、その積算値を中間転写ベルト10の移動位置情報とする。一方、中間転写ベルト10の回転軸に取付けたロータリエンコーダ19から出力されるパルス信号をf−V変換回路37によって回転速度信号に変換する。そして、その回転速度信号と移動位置情報とに基づいて、制御コントローラ71が目標位置データを補正しながらモータ7の駆動力を制御して、中間転写ベルト10の移動速度をフィードバック制御する。
(もっと読む)
モータ制御方法及び装置

【課題】 エンコーダからの出力パルスに基づきモータをフィードバック制御する際、モータが一時的に停止してエンコーダからパルスエッジが出力されなくなっても、モータの駆動を再開できるようにする。
【解決手段】 プリンタのキャリッジ駆動制御装置において、CRモータ35の駆動制御時に、エンコーダエッジ検出部8からエッジ検出信号が出力されない時間が置換判定時間以上経過すると、速度演算部16による検出速度に代えて、CPU2側から設定される置換速度を、CRモータ35の駆動制御に用いるキャリッジ31の移動速度として設定する。この結果、CRモータ35の駆動制御時に、CRモータ35の回転が停止(若しくは略停止)したとしても、その後、置換判定時間が経過した時点で、CRモータ35から駆動トルクを発生させて、キャリッジ31の駆動を再開することができるようになる。
(もっと読む)
無端移動部材駆動制御装置及び画像形成装置と無端移動部材の移動速度制御方法
【課題】 無端移動部材をその移動速度やセンサの取付け誤差、マークのピッチ誤差や伸縮などの影響を受けず、その移動速度を高精度に制御できるようにする。
【解決手段】 無端移動部材である中間転写ベルト10の表面に形成した等間隔で連続する多数のマークをマークセンサ6A,6Bで検出し、その検出信号の位相差を位相差算出手段13が算出する。予め中間転写ベルト10一周回動させたときに、順次算出される位相差Cabによって、その一周分のマークのピッチ誤差のプロファイルをプロファイル作成手段14が作成し、そのプロファイルから補正データ記憶手段37が一周分のマークピッチ補正データを作成して記憶する。その後の通常の動作時に、順次算出される位相差Cabと補正データ記憶手段37から順次読み出されるマークピッチ補正データとに基づいて、制御手段70が目標位置データを補正しながら駆動手段80による中間転写ベルト10の移動速度をフィードバック制御する。
(もっと読む)
回転電機のロータ位置検出装置
【課題】 センサと制御装置との間の信号線を削減することができ、これにより、車両搭載に当ってのレイアウトを容易なものとし、製造コストを低減することができる回転電機のロータ位置検出装置を提供する。
【解決手段】ロータの周方向位置を検出する絶対値タイプのセンサ2と、当該センサ2に隣接して配置されて、当該センサ2の出力する図示しないデジタル絶対値信号をデジタル相対値信号3に変換して回転電機の制御装置4に出力する制御基板5と、回転電機を制御する制御装置4とからなる、回転電機のロータ位置検出装置1において、
前記制御基板5に、センサ2の出力するデジタル絶対値信号をアナログ絶対値信号6に変換して制御装置4に出力するD/A変換手段7を設け、
前記制御基板5または制御装置4において、当該アナログ絶対値信号6および当該デジタル相対値信号3のいずれかを、回転電機の制御に用いる信号として、選択可能とすることを特徴とする。
(もっと読む)
電気モータ制御器
任意のタイプの電気モータの特性を自動的に学習し且つ当該電気モータに関するモータ・モデルを計算する当該電気モータ用制御システムである。当該制御システムは、計算されたモータ・モデルを用いて、特定の解像度を達成する閉ループ制御設計を生成する。制御システムはまた、モータ・モデルを用いて、多様の運動指令に対する効率的運動プロフィールを自動的に構成する。制御システムはまた、非常に正確なモータの位置情報を与えるエンコーダ・インターフェース装置を含み得る。  (もっと読む)
(もっと読む)
モータ制御方法及び制御装置
【課題】 モータ負荷の変動によらず安定して駆動対象を駆動できるようにする。
【解決手段】 モータの駆動が開始されると、PWM値が初期PWM値(駆動開始時はstart_pwm1)に設定され、一定の変化率で徐々に増加していく。そして、エンコーダエッジが検出される毎に、初期PWM値にリセットされて再び徐々に増加していく。一方、駆動中にモータ負荷が増加していくことが予め想定されるため、その想定される負荷変動に応じた初期PWM値の補正データが各位置毎(位置カウント値毎)に予めプロファイルとして設定されている。この補正データはstart_pwm1に対する補正データである。そのため、エンコーダエッジが検出される毎に、そのときの位置カウント値に対応した補正データに従ってstart_pwm1が補正され、その補正後の値が、そのエッジ検出時にリセットされるべき新たな初期PWM値となる。
(もっと読む)
制御信号処理装置
【課題】 外乱の影響により変化し得る指令値に対し、応答遅れが生じることなくその外乱を除去して制御対象を適性に制御することを可能とする。
【解決手段】 制御装置(2)からの指令値を示す制御信号を受信し、修正指令値を示す制御信号を出力する信号処理部(4)と、その信号処理部が出力した制御信号を受信し、制御対象に対する駆動信号を出力する駆動信号出力部(6)とを備え、指令値が変化した場合に、その変化に追従させるように指令値の変動幅よりも小さい範囲で修正指令値を変化させ、指令値が変化した後に変化しない状態が規定時間継続した場合に、修正指令値を指令値と一致させる構成とする。
(もっと読む)
駆動制御装置、駆動制御方法、画像形成装置、画像読取装置及びプログラム
【課題】 つなぎ目や汚れ等によるマーク検出信号中の不連続部分の直前及び直後の少なくとも一方に不安定信号部分が存在しても、適切な駆動制御を行うことである。
【解決手段】 本駆動制御装置は、無端移動する駆動制御対象部材又は該駆動制御対象部材の無端移動とともに無端移動する無端移動部材の無端移動方向にわたり所定間隔で連続するように設けた複数のマークをマーク検出手段によって検出し、これにより得られるマーク検出信号を用いて駆動制御対象部材の駆動をフィードバック制御する。各マークに対応する信号部分の間隔が予め決められた範囲外となるマーク検出信号中の不連続部分、並びに、その不連続部分の直前及び直後の信号部分の少なくとも一方については、マーク検出信号に代わる代替信号を用いてフィードバック制御を行う。
(もっと読む)
サーボモータ用の制御部
【課題】
本発明は、調整要素を駆動させる電気式サーボモータ(1),目標値(3)を与えるポテンショメータ,サーボモータ(1)に配置された実際値センサ,及び目標値(3)と実際値(4)とを比較する組み込まれた評価装置及び制御装置(7)を有するモータードライバ(6)を備えた調整要素を位置決めする駆動装置に関する。この場合、パルス信号(17)が目標値(3)に重畳可能である。このパルス信号(17)は、評価装置及び制御装置(7)内に存在するモータードライバのヒステリシス(15,16)を超える。  (もっと読む)
(もっと読む)
121 - 129 / 129
[ Back to top ]