
Fターム[5H501JJ24]の内容
Fターム[5H501JJ24]に分類される特許
1 - 20 / 232
モータ制御装置及びモータ制御方法
モータ制御装置
モータを制御するための方法およびシステム
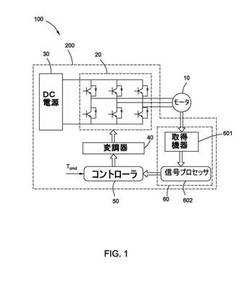
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
周期エラー検出方法および周期エラー検出回路

【課題】周期処理の処理時間超過を確実に検出することのできる周期エラー検出方法および周期エラー検出回路を提供する。
【解決手段】実施形態の周期エラー検出方法は、カウンタ11と、レジスタ12とを有するキャプチャタイマ1を備え、周辺回路110から出力される周期トリガをキャプチャトリガCTG1として取得した第1のカウント値cnt1、モジュール120の処理開始時にキャプチャトリガCTG2をかけて取得した第2のカウント値cnt2、モジュール120の処理終了時にキャプチャトリガCTG3をかけて取得した第3のカウント値cnt3を、それぞれレジスタ12に保存する。プロセッサ100は、モジュール120からの完了通知を受け取ると、レジスタ12からcnt1、cnt2、cnt3を読み出し、その値にもとづいてモジュール120の処理時間を算出し、所定周期と比較して周期処理エラーの発生の有無を判定する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法
【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
誘導モータ制御装置及び制御方法
【課題】車両の走行用動力源として搭載された誘導モータの駆動制御で用いられるモータ定数を簡易且つ精度よく求めることにより、誘導モータの制御精度を向上可能な誘導モータ制御装置及び制御方法を提供する。
【解決手段】誘導モータ1の制御装置は、拘束状態で第1のパラメータ群を算出する第1のパラメータ群算出部8と、無負荷状態で第2のパラメータ群を算出する第2のパラメータ群算出部9と、前記算出した第1及び第2のパラメータ群を誘導モータの回転数N及び出力トルクと対応付けてマップとして記憶する記憶部10と、第1及び第2のパラメータ群を前記マップから取得して電流指令値を算出する電流指令値算出部8,9とを備えたことを特徴とする。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
1 - 20 / 232
[ Back to top ]