
Fターム[5H501LL47]の内容
Fターム[5H501LL47]に分類される特許
1 - 20 / 46
フィードバック制御系の振動検出装置及び振動検出装置を備えたモータ制御装置
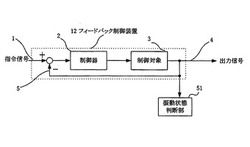
【課題】モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置および振動検出装置を備えたモータ制御装置を提供する。
【解決手段】負荷を連結したモータを制御対象とする制御装置の振動検出装置であって、制御装置は、制御対象をフィードバック制御してモータを制御する制御器部と、制御装置の出力の上下限ピーク値とそれらの発生時刻に基づいて、振動の発生を判断する振動状態判断部と、を備えた。
(もっと読む)
モータ駆動回路、および、モータ駆動システム

【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
ボールバランサを有する洗濯機
【課題】コストの増大、大型化、重量の増大及び信頼性の低下を招くことなく、案内部材に対して転動体を固定できるようにする。
【解決手段】回転体と、回転体を回転駆動する電動機と、回転体の側周部に周回して設けられた案内部材と、案内部材の内部に収容されて偏心荷重によるアンバランスを打ち消す方向に移動する1又は複数の転動体と、電動機を駆動して回転体の回転速度を制御する制御手段とを具備したものであって、回転体が連続的な速度変化又は所定値以下の加速度変化で回転する状態では転動体が前記案内部材に対して移動せず、回転体が所定値以上の加速度変化で回転する状態で転動体が案内部材に対して移動するように、案内部材と転動体との転がり摩擦係数を設定している。
(もっと読む)
撮像装置
【課題】カメラを冷却するファンモータを備えた撮像装置において、カメラの取付場所や周辺の部品組付状態等によってカメラの共振周波数が変化しても、ファンモータの回転振動によってカメラが共振することを確実に防止できるようにする。
【解決手段】実際のカメラ13の振動周波数を検出して、カメラ13の振動周波数がファンモータ14の振動周波数の整数倍(共振周波数)とならないように該ファンモータ14の回転速度(振動周波数)を調整する。ここで、カメラ13の振動周波数の検出方法は、ファンモータ14を回転させながらカメラ13で静止状態の被写体12を所定の撮像周期(所定時間間隔)で撮像して該被写体12のマーク12aの位置を認識する処理を繰り返すことで、該カメラ13の視野内で該被写体12のマーク12aが振動する周期Tを検出して該カメラ13の振動周波数を求める。
(もっと読む)
サーボモータの制御装置および制御方法
【課題】制御パラメータを変更することでフィードバックループに発振が生じたとしても、速やかに発振を停止させる。
【解決手段】フィードバックループの発振を検知し、発振検知信号を出力する発振検知部と、フィードバックループの制御パラメータの設定を、発振検知信号に基づき操作指示するパラメータ操作部と、制御パラメータを設定するための設定値が供給され、パラメータ操作部の操作指示に応じて更新しながら制御パラメータをフィードバックループに設定する更新部とを備え、発振検知信号が発振を検知していないことを示すとき、パラメータ操作部は更新部に対して、供給された設定値に応じた制御パラメータを設定するよう操作指示し、発振検知信号が発振を検知したことを示すとき、パラメータ操作部は更新部に対して、フィードバックループの周波数帯域幅が狭くなるような制御パラメータを設定するよう操作指示する。
(もっと読む)
ロータ熱感受性の診断および予測
【課題】非常に早い段階で修正措置を取ることができ、修理費の著しい節約ならびに機械の利用可能性の増加につながるようなロータ熱感受性のオンライン診断を提供する。
【解決手段】第1のシステムは、電気機械のロータの熱感受性を評価するために提供され、ロータから振動データおよび界磁電流を得るためのならびに一組の動作パラメータを得るための入力システムと、振動と界磁電流との間の関係を計算するためのシステムと、関係が有意であるかどうかを決定するための評価システムと、有意な関係を決定したことに応答して熱感受性の通知を発行するためのシステム。第2のシステムは、ある期間にわたる振動と界磁電流との間の一連の関係を計算するためのシステムと、その期間にわたる一連の関係の変化が有意であるかどうかを決定するための評価システムと、一連の関係の有意な変化を決定したことに応答して熱感受性の通知を発行するためのシステム。
(もっと読む)
モータの駆動装置、駆動方法および入力装置
【課題】所望の振動波形を実現するモータの駆動装置およびこれを用いた入力装置を提供する。
【解決手段】入力装置100は、タッチパネル(入力操作部)1と、入力判定部2と、モータの駆動装置(駆動装置)3と、モータ4と、振動部5とを備えている。また、駆動装置3は、目標波形生成部11と、加速度センサ(振動検出部)12と、波形整形部13と、増幅部(駆動信号生成部)14とを有する。振動部5の実際の振動波形を検出する加速度センサ12を設け、実振動波形が目標振動波形に近づくよう、フィードバック制御を行う。そのため、より正確に目標とする振動波形を実現できる。
(もっと読む)
サーボモータの健康警告装置およびその計算方法
【課題】本発明は、サーボモータの健康警告装置およびその計算方法に関する。
【解決手段】
サーボモータの健康警告装置およびその計算方法は、コンピュータ数値制御工作機械の振動状況の推測に使用される。まず、振動検出ユニットによって、振動信号が生成され、その後、該振動信号がデータバッファに順次伝送される。続いて、時間周波数領域変換ユニットによって、振動信号の時間周波数領域変換が行われる。最後に、悪化指数計算ユニットによって、悪化指数が計算され、健康指数計算ユニットを利用して、健康指数が得られる。したがって、内蔵の振動検出ユニットを利用して、余分な検出器の取付けおよび配線を省くことができる。さらに、健康指数の大小によって、サーボモータがコンピュータ数値制御工作機械において回転することによる振動状況を推測する。非線形および非定常の振動特性に対して、好適な解析を提供する。
(もっと読む)
転がり軸受部振動データの高周波電磁振動成分除去方法および高周波電磁振動成分除去装置、回転機械の転がりの軸受診断方法および軸受診断装置
【課題】
振動センサから出力される電気信号に基づいて高調波電磁振動の周波数成分を特定し、特定された高調波電磁振動の周波数成分を低減させる。さらにそのデータを用いて、回転機械の転がり軸受診断を行う。
【解決手段】
検出した振動加速度の高周波帯域のピーク値の中で、各ピーク間の周波数間隔が整数倍であるピーク値のレベルを低減し、回転機械の回転数に関係なくインバータ駆動モータで発生する高調波振動成分を除去する。
(もっと読む)
電動機制御装置
【課題】機械の振動抑制と位置指令に対する電動機位置の高速応答を同時に実現し、且つ、実機を動作させること無く予めトルク指令の飽和を判定することができる電動機制御装置を提供する。
【解決手段】位置指令を生成して出力する指令生成部と、前記位置指令に基づいてトルクフィードフォワード信号を演算して出力するトルクフィードフォワード演算部と、前記トルクフィードフォワード信号のみで電動機を動作させた場合の前記位置指令から電動機位置検出値までの伝達特性モデルを用いて、前記位置指令を新たな位置指令に変換する位置指令変換部と、前記新たな位置指令と前記電動機位置検出値とを入力してトルク指令を制御演算して出力する制御演算部と、を備える。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
サーボ制御装置
【課題】位置制御の精度向上を実現すること。
【解決手段】モータの回転運動を直線運動に変換するねじ送り部と、ねじ送り部によって直線移動させられる被駆動部と、ねじ送り部及び被駆動部が支持される支持体とを備える数値制御機器に適用され、被駆動部の位置を位置指令に一致させるようにモータを制御するサーボ制御装置であって、支持体の振動反力による被駆動部の振動を補償する支持体反力補償部311を備え、支持体反力補償部311が備える伝達関数には、被駆動部の剛性項が含まれているサーボ制御装置を提供する。
(もっと読む)
位置決め装置の同期防振制御装置
【課題】モータ軸と負荷間をボールねじやタイミングベルト等の負荷位置によりバネ定数が大きく変化する機構で接続した位置決め装置に負荷側外乱オブザーバを適用した場合においても、バネ定数の変化の影響を受けない精度の高い負荷側外乱の推定を可能とし、外乱に対する高いロバスト性を持たせて、振動抑制と同期制御を実現可能する。
【解決手段】モータ軸と負荷間を弾性体で接続した、負荷位置によりバネ定数Kfが大きく変化する位置決め装置において、負荷側の軸ねじれ角を測定し、軸ねじれ角と負荷の加速度に基づいて構成した負荷側外乱オブザーバ40にて推定した負荷側の外乱を、負荷側外乱から位置指令値までの逆システム50を通してフィードバックする際に、負荷側外乱オブザーバ内のバネ定数ノミナル値Kfnを負荷位置により変える。
(もっと読む)
モータ制御装置、画像形成装置
【課題】リアルタイムに転写ベルトの表面速度の変動を抑制する制御を行うことが可能なモータ制御装置、画像形成装置を提供することを目的としている。
【解決手段】転写ベルトが駆動を開始した際に、転写ベルトが所定回数周回するまでの間は、転写ベルトの駆動開始前にサンプリングした転写ベルトの表面速度の変動成分と、転写ベルトが駆動開始してからサンプリングした転写ベルトの表面速度の変動成分とを用いて算出した目標関数に基づき転写ベルトを駆動させる駆動ローラの回転を制御することで、リアルタイムに駆動開始後も転写ベルトの表面速度の変動を抑制する制御を行う。
(もっと読む)
回転機械システム
【課題】回転機械システムとして、回転機械と電動機とを接続する動力伝達機構の異常を適切に検出することである。
【解決手段】回転機械システム10は、一般的に送風機と呼ばれる部分を構成する送風機本体20と電動機30と、送風機と呼ばれる部分の異常を検出する制御部50とその表示を行う表示部60を含む。駆動電流検出センサ38は、電動機30の駆動電流について、電動機30の無負荷電流以上であり、送風機本体20の吸込口22を閉じたときの回転機械無負荷時負荷電流以下の範囲内で予め任意に設定された電流閾値以下になったことを検出し、これによって動力伝達機構であるベルト36の切断を検出する。
(もっと読む)
モータ制御装置とモータ制御方法
【課題】 制御対象の振動を抑制しつつモータを滑らかに動作させることのできるモータ制御装置を提供する。
【解決手段】 移動時間tbと指令次数に関する変数kとaを移動距離に依存する変数とした速度時間関数に基づいて指令払い出し周期毎の指令を演算する指令演算部と,sをラプラス演算子とした時に,ωs,ωc,ζを変数とする2次の伝達関数GF(s)の特性を有するフィルタ演算をする指令フィルタ演算部と,移動時間tbと指令次数に関する変数kに基づいて指令フィルタの変数であるωsを演算で求めるフィルタ定数演算部を備える。
(もっと読む)
電動車両の制振制御装置
【課題】車両重量や走行抵抗の変動に起因する定常的な外乱により生じる不要な加速度変動を抑制する。
【解決手段】動力源にモータ/ジェネレータを有するFRハイブリッド車両において、駆動トルクからモータ回転速度を推定するモータ回転速度推定部102aと、モータ回転速度を検出するレゾルバと、モータ回転速度推定値ωm#とモータ回転速度検出値ωmの偏差ω_errから外乱を推定する外乱推定部102cと、車両の振動成分を抽出して振動を抑制するための第2トルク目標値Tm*2を算出する第2トルク目標値演算手段102と、モータ回転速度擬似値ωm_susを算出する擬似モータ回転速度演算部102dと、を備える。そして、外乱推定部102cは、制振制御を開始する前の制振制御停止中、モータ回転速度検出値ωmに代え、モータ回転速度検出値擬似値ωm_susを用いて外乱を推定する。
(もっと読む)
分注装置、自動分析装置及び分注装置のメンテナンス方法
【課題】駆動モータ停止時における振動の振幅の増大を抑えることが可能な分注装置、自動分析装置及び分注装置のメンテナンス方法を提供すること。
【解決手段】回動モータ34の回転がタイミングベルト36によって伝達される支柱21を中心として回動すると共に、支柱方向に昇降する分注アーム20aを備え、試薬又は検体を含む液体試料を分注する検体分注装置20、自動分析装置及び分注装置のメンテナンス方法。検体分注装置20は、駆動モータ34停止時の支柱21又は駆動モータの回転軸の回転方向の振動を検知するロータリエンコーダ38と、駆動モータの駆動速度を制御する制御部15とを備え、制御部は、ロータリエンコーダが検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を減速制御する。
(もっと読む)
車両のステアリング装置
【課題】電動モータの1相が通電不良となり2相通電駆動する場合に、振動を防止しつつ電動モータを良好に回転させる。
【解決手段】2相通電指令部117は、電動モータ31への通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って電気角θeの変化に対して変動しない操舵アシストトルクを発生するための理論上の2相通電用電流演算式と、電動モータ31の上限電流を規定する最大電流と、2相通電用電流演算式における電気角θeを進める進角量とに基づいて、2相通電用の指令電流を演算する。舵角比変更指令部120は、電動モータ31が振動状態となった場合、舵角比可変装置に舵角比変更指令を出力する。これにより、電動モータ31の回転位置が変化して振動が停止する。
(もっと読む)
1 - 20 / 46
[ Back to top ]