
Fターム[5H505AA16]の内容
交流電動機の制御一般 (51,584) | 用途 (3,022) | 自動車(ワイパー等の電装品も含む) (1,490)
Fターム[5H505AA16]に分類される特許
1 - 20 / 1,490
環境に優しい車両用レゾルバの異常出力補償方法
回転機の制御装置
モータ制御装置
電気自動車用モータ制御方法
回転電機システム
モータ駆動装置、およびこれを用いた機器
多相回転機の制御装置
回転機の制御装置
インバータ用短絡故障検出装置及びモータ制御装置
電動機から発生する電磁音を制御する方法
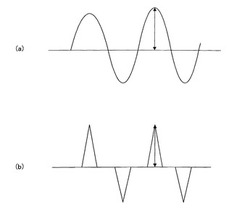
【課題】消費電力を低減しつつ、所望の周波数を有する電磁音を所望の大きさで電動機から発生させる。
【解決手段】交流電動機、前記交流電動機に交流電力を供給する電力供給手段、及び前記電力供給手段を制御して前記交流電動機の相コイルに流れる電流を調節する制御手段を備える動力装置において、前記交流電動機に対するトルク電圧指令値Vq*及び励磁電圧指令値Vd*の少なくとも何れか一方の電圧指令値に周期的な変動を加えることにより所望の周波数及び音量を有する電磁音を前記交流電動機から発生させるに当たり、前記電圧指令値の増大方向への変動と減少方向への変動とが連続して起こる変動パターンに従って前記電圧指令値に変動を加えることにより、前記交流電動機の相電流において、同じ周期及び振幅を有する正弦波と比較して、より小さい電流実効値及びより多くの周波数成分を有する波形を生じさせる。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置

【課題】エンジン制御系からクランク角情報を入力することなくモータ制御系でエンジンのクランク角を判別可能として、エンジン自動停止の際に走行用モータにより適切なタイミングで制動を加えてエンジンを最適クランク位置で停止でき、もって、その後の自動始動時のエンジン始動性を向上できるハイブリッド車両のエンジン停止制御装置を提供する。
【解決手段】エンジン2を自動停止する際に、クラッチ4を接続して、エンジン2の燃料供給を中止した後にモータ6を駆動し、回生制御としてモータ6の回転速度を所定の目標値に維持する回転制御を実行する。このときエンジン2のトルク変動に同期して変動するモータ6の回生率を指標として変動波形のピークを特定し、そのピークを起点として、予め最適クランク位置までのクランク角として設定された停止クランク角Δθstopに基づき最適クランク位置を判別する。エンジン2が最適クランク位置に到達した時点でモータトルクを増加させてエンジン2に制動を加えて停止させる。
(もっと読む)
駆動装置
【課題】電動機を含む駆動系の共振の発生を抑制しつつ二次電池を適正使用する。
【解決手段】バッテリ電圧Vbがバッテリの適正な使用範囲における電圧上限値としての補償電圧Vrefを超えているときには、バッテリ電圧Vbが補償電圧Vref以下になるようフィードバック制御における補正量として目標補正量Taj*を計算し(S170)、計算した目標補正量Taj*を基本的には補正量Tajとしてモータトルク指令Tm*を設定する際に用い、目標補正量Taj*が減少したときには、モータを含む駆動系の共振周波数の周期とは異なる時間として予め定められた所定時間に亘って、目標補正量Taj*が減少する前の値を補正量Tajとして保持してモータトルク指令Tm*を設定する際に用いる(S220,S230)。これにより、モータを含む駆動系が共振するのを抑制することができると共にバッテリを適正使用することができる。
(もっと読む)
電動機から発生する電磁音を制御する方法
【課題】所望の周波数を有する電磁音を所望の大きさで電動機から発生させる方法を提供する。
【解決手段】交流電動機と、前記交流電動機に交流電力を供給する電力供給手段と、前記電力供給手段を制御して、前記交流電動機の相コイルに流れる電流を調節する制御手段と、を備える動力装置において、
前記交流電動機に対するトルク電圧指令値Vq*及び励磁電圧指令値Vd*の少なくとも何れか一方の電圧指令値に周期的な変動を加えることにより、所望の周波数及び音量を有する電磁音を前記交流電動機から発生させる。
(もっと読む)
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
モータ制御装置及び車両の電動パワーステアリング装置
【課題】インバータ回路のトランジスタに発生する異常をより確実に検出することのできるモータ制御装置を提供する。
【解決手段】このモータ制御装置15は、インバータ回路20に設けられた対をなすトランジスタT1〜T6のスイッチングを制御することでモータ11に三相の交流電流を供給する。また、モータ11に供給される各相電流値を電流センサ30u,30v,30wを通じて検出し、検出される各相電流値に基づいてトランジスタT1〜T6に貫通電流が発生していると判断されるとき、インバータ回路20の駆動を停止させる。ここでは、各相電流値に対して第1の閾値を設定するとともに、各相電流値の総和に対して第2の閾値を設定する。そして、各相電流値の絶対値の少なくとも一つが第1の閾値以上であって且つ、各相電流値の総和の絶対値が第2の閾値以上であるとき、トランジスタT1〜T6に貫通電流が発生していると判断する。
(もっと読む)
電気自動車用のインバータ
【課題】スイッチング回路に不具合が発生し、UVW3相のうちの2相でモータを駆動する際の駆動効率の低下を抑制する。
【解決手段】インバータ100は、スイッチング回路群4の入力側に直列に接続されているコンデンサCp、Cnと、リレー回路5と、コントローラ2と電力調整回路3を備える。リレー回路5は、UVW3相の各モータ線の夫々の接続先を、インバータ主回路4から中性点Npへ切り換える。コントローラ2は、スイッチング回路群のいずれかが故障した場合、故障したスイッチング回路に対応するモータ線を中性点Npへ切り換えるとともに、2相でモータを駆動する駆動信号を故障していないスイッチング回路に与える。電力調整回路3は、入力端がバッテリ9に接続されており、3個の出力端は正極線10a、負極線10b、及び、中性点Npに接続されている。電力調整回路3は、2個のコンデンサの両端電圧の電圧差を既定の許容範囲に維持する。
(もっと読む)
モータを制御するための方法およびシステム
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
誘導電動機の回転子時定数推定装置
【課題】本発明は、周辺環境または運転条件の影響を少なく受けて、常に一定水準のトルクを発生する誘導電動機の回転子時定数推定装置を提供する。
【解決手段】本発明は、d軸電流指令及びq軸電流指令を受信して、q軸電圧指令を出力し、q軸電圧推定値を出力して、前記q軸電圧指令と前記q軸電圧推定値との差である回転子時定数の変動値を出力し、前記回転子時定数の変動値を回転子時定数に加算して、変更された回転子時定数を出力する。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
1 - 20 / 1,490
[ Back to top ]