
Fターム[5H505BB09]の内容
交流電動機の制御一般 (51,584) | 目的 (3,865) | 高応答性 (355)
Fターム[5H505BB09]に分類される特許
1 - 20 / 355
冷凍サイクル装置の室外機
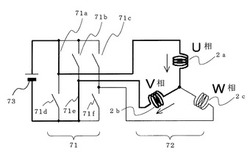
【課題】電動機に結露が生じることを抑制する冷凍サイクル装置の室外機を提供することを目的としている。
【解決手段】室外熱交換器21と、室外熱交換器21の下流側に設けられ、室外熱交換器21に外気を供給するファン24を回転させる3相の電動機27と、電動機27を制御する制御回路77とを有し、制御回路77は、室外熱交換器21の除霜運転時に、電動機27が回転しないように3相のうちの2相に通電させ、所定時間間隔で通電する2相を切り替える。
(もっと読む)
油圧ユニット

【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
リラクタンス型同期電動機の制御装置
【課題】電動機回転子の磁気的な構造および材質の磁気特性に起因する電流−トルクの非線形領域を回避できる安定した制御性を持つ制御装置を提供する。
【解決手段】
制御装置は、上位制御装置から指令されるトルク指令値に比例するq軸電流振幅値を演算するq軸電流演算部と、前記トルク指令値に比例するd軸電流振幅値を演算するd軸電流演算部と、回転子速度に応じて変化するq軸電流係数、d軸電流係数をそれぞれ演算する速度係数演算部と、q軸電流振幅値とq軸電流係数、d軸電流振幅値とd軸電流係数をそれぞれ乗じることでq軸電流指令値およびd軸電流指令値とを算出し、d軸電流指令値に基づいた三角形補償関数又は台形補償関数によりq軸電流補償値を演算するq軸電流補償値演算部と、算出されたq軸電流補償値をq軸電流指令値に加算した補償後q軸電流指令値を出力する出力部と、を備える。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
電気自動車
【課題】トルク重視の走行モードと経済性重視の走行モードを切り換えることのできる電気自動車を提供する。
【解決手段】モータを制御するコントローラは、モータのトルク指令に相当する電流指令値をdq座標系におけるd軸成分Idとq軸成分Iqに分解し、それら成分IdとIqを3相UVWの指令値に変換してインバータへ出力する。コントローラは、電流指令値に対して最大トルクを出力するIdとIqの組を与えるトルク優先マップと、電流指令値に対してモータ損失が最小となるIdとIqの組を与える効率優先マップを切り換えて用いることができる。
(もっと読む)
出力電流および出力電圧の測定に基づくトルクオブザーバ
【課題】電力変換器により給電される車両用3相駆動電動機のトルクを推定するための方法であって、3つの相線路が電力変換器から駆動電動機に導くことによって、車両用駆動電動機のトルクを確実に推定する。
【解決手段】3つの相線路6,7,8のうち少なくとも2つの相線路においてそれぞれ電流i1,i2,i3が測定され、3つの相線路6,7,8においてそれぞれ電圧u1,u2,u3が測定される。測定された電流又は測定された電圧から回転磁界周波数がが求められる。最終的に、測定された電流と、測定された電圧と、求められた回転磁界周波数とからトルクが推定される。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
昇圧コンバータの制御装置
【課題】駆動電圧系の電圧の目標電圧への追従性を向上させる。
【解決手段】昇圧コンバータのデューティ指令値Dutyは、電池電圧系電力ラインの電圧VLから昇圧されている駆動電圧系電力ラインの電圧VHとバッテリの充放電電力とが変動していない所定の定常状態のときには前回Dutyから前回Dffを減じることにより更新されると共に所定の定常状態でないときには更新されずに保持される力行時推定項Dadj1または回生時推定項Dadj2と(S150,S160,S260,S270)フィードフォワード項Dffとフィードバック項Dffとの和として設定される(S220,S330)。即ち、所定の定常状態でない状態になったときでも、フィードバック項Dfbとは別に、装置の個体差に応じた値として所定の定常状態のときに更新される力行時推定項Dadj1または回生時推定項Dadj2を一部に加えてデューティ指令値Dutyが設定される。
(もっと読む)
誘導電動機の速度制御装置
【課題】本発明は、連続工程ラインにおいて張力及び位置センサーを用いないオープン−ループ速度制御を行って、ベクトルインバータの機能を向上するための誘導電動機の速度制御装置を提供する。
【解決手段】本発明の装置は、張力指令、摩擦損補償を利用して、速度制御部の出力に対するトルク制限を計算し、これを利用して誘導電動機の速度を制限して、連続工程ラインで張力センサー及び位置センサーを用いることなく、ベクトル制御方式のインバータの性能を向上することができる。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
回転電機制御装置
【課題】インバータを備えた回転電機駆動装置と直流電源部との接続が遮断された場合に、回転電機からインバータを介して回生される回生電力を迅速に低減させる。
【解決手段】回転電機の回転に同期して回転する2軸の直交ベクトル空間において、各軸に沿った界磁電流と駆動電流との合成ベクトルである電機子電流を制御してインバータを制御するインバータ制御部を備える。インバータ制御部は、直流電源部とインバータとの接続が遮断状態であると判定した場合には、回転電機の回生トルクがゼロとなるようにインバータを制御するゼロトルク制御を実行すると共に、ゼロトルク制御におけるトルク指令を維持しつつ電機子電流が増加するように、界磁電流を変化させる高損失制御を実行する。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
モータ制御装置
【課題】過渡時におけるロータ位置の検出精度を向上させる。
【解決手段】同期モータ12のロータ位置をセンサレスで検出する機能を備えたモータ制御装置10であって、誘起電圧波高値Ep、電流電気角θiから誘起電圧電気角θeを減じた減算値(θe−θi)の2つのパラメータで規定される電流位相βを予め記憶する位相記憶部と、これに記憶されたβを参照することにより、電流極座標変換部26で検出されたθi、並びに、誘起電圧極座標変換部28で検出されたEp及びθeに基づいて、βを選定する位相選定部と、このβを第1の変数とし前記検出されたθiを第2の変数とするロータ計算式からロータ位置θmを算出するロータ位置演算部と、を含むロータ位置検出部30を備えて成る。そして、位相選定部においてβを選定するときに、前記検出されたEp及びθeを、コイルに流れる電流の変化に応じて補正する補正部32を更に備えたものである。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
同期機制御装置
【課題】トルクと磁束とを独立して操作できるような電流制御系の構成するとともに、高速駆動時のような同期機の電気角周波数(回転速度)に対する電力変換手段のキャリア周波数の比が小さく、電流フィードバック制御が困難となる条件下においても、電機子鎖交磁束に基づいたトルク指令生成とトルク指令への追従性の向上を図る。
【解決手段】 同期機1の運転条件に応じて、磁束指令生成器5から出力される磁束指令と磁束演算器6から出力される推定電機子鎖交磁束とを切り換えて電機子鎖交磁束を出力するとともに、第2の電圧指令生成器32の出力の有効無効を切り換える信号を出力する磁束設定器8と、磁束指令と推定電機子鎖交磁束との差分に基づいて磁化電流指令を生成する磁化電流指令生成器9とを備えている。
(もっと読む)
モータ駆動システム及びモータ駆動方法
【課題】モータの停止動作における回生容量の大きさを抑制できるモータ駆動システム及びモータ駆動方法を提供する。
【解決手段】モータの回転数の減少率に関して、回生直流電圧から交流電圧への変換に必要な電圧供給装置の回生容量が一定値であるように設定された可変減速レート、及び所定の停止時間でモータが停止するように一定の減少率が設定された一定減速レートを、それぞれ算出する減速レート算出装置と、モータの停止動作の開始時からモータの回転数が可変減速レートと一定減速レートとで一致する時刻まで可変減速レートに従ってモータを減速させた後、一定減速レートに従ってモータを減速させるようにモータ駆動装置を制御する制御装置とを備える。
(もっと読む)
交流回転機の制御装置
【課題】速度制御系の機械的応答で制約されていたトルクの応答性を改善できる交流回転機の制御装置を提供する。
【解決手段】交流回転機2へ交流電圧を出力する電力変換手段3と、交流回転機2に流れる電流を検出する電流検出手段4と、検出電流を回転二軸座標上の電流へ変換する電流演算手段5と、回転二軸座標上の電流に基づいて交流回転機2が出力する出力トルクを演算するトルク演算手段8と、トルク指令と出力トルクとの偏差に基づいて周波数指令を演算する周波数指令演算手段9と、周波数指令を補正する周波数補償量をトルク指令に基づいて演算する補償器10と、補正後の周波数指令に基づいて回転二軸座標上に設定した制御座標軸の位相を演算する位相演算手段6と、補正後の周波数指令と制御座標軸の位相とに基づいて電力変換手段に出力する電圧指令を演算する電圧指令演算手段7を備える。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI制御量を演算するためのPI制御手段50,51と、モータの非干渉化制御のための非干渉化制御量を所定のタイミングで演算するための非干渉化制御量演算手段52と、PI制御手段50,51により演算されたPI制御量と非干渉化制御量演算手段52により演算された非干渉化制御量とから補正後の非干渉化制御量を決定する補正演算手段53,54と、PI制御手段50,51によって演算されたPI制御量と補正演算手段53,54によって補正された補正後の非干渉化制御量とを加算する加算手段55,56と、を備え、加算手段55,56は、所定の条件をみたす場合は、非干渉化制御量演算手段52によって演算された前回値の非干渉化制御量を補正後の非干渉化制御量として加算する。
(もっと読む)
1 - 20 / 355
[ Back to top ]