
Fターム[5H505EE48]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | 制動、回生を行うもの (201)
Fターム[5H505EE48]に分類される特許
61 - 80 / 201
巻上げ駆動装置のモータ制御システム
巻上げ部材(4)に操作可能に接続されて積荷(6)を吊り上げる電気モータ(2)を有する巻上げ駆動装置のモータ制御システム。モータ制御システムは最終角周波数基準値(ω*s)を生成して電気モータ(2)を制御するものであり、角周波数基準値の修正項(ωs,cor)を生成するパワーリミッタ手段(8)を含む。パワーリミッタ手段(8)は積分制御手段(10)を含み、パワーリミッタ手段(8)は積分制御手段(10)の出力信号(Ip)を用いて角周波数基準値の修正項(ωs,cor)を生成するものであり、積分制御手段(10)の初期データには、電気モータ(2)の電力の実績値および電気モータ(2)の電力に関連する限界値に関する情報が含まれている。 (もっと読む)
電力変換装置

【課題】永久磁石同期電動機の直流制動時に、過大な電流が流れることを防止し、安定した制動動作を行うこと。
【解決手段】電動機の回転数検出手段や外部ブレーキを必要とせず、高速回転時においても安定した制動力を得られ、低速回転時においても大きい制動力を得ることのできる停止方法で、電流が直流制動時、最大電流設定値を超えた場合にはPWM全相遮断及びゼロベクトル出力を繰り返し行い、電流が直流制動復帰電流設定値以下になった場合には再度直流制動を行う。
(もっと読む)
モータ駆動装置
【課題】単一の電流検出手段を用いた場合でも、すべての相について、上段スイッチング素子および下段スイッチング素子のON故障を検出することが可能なモータ駆動装置を提供する。
【解決手段】駆動手段101にPWM信号を出力する制御手段102は、上段回生時異常判定手段103と、下段回生時異常判定手段104とを有する。上段回生時異常判定手段103は、上段スイッチング素子Q1、Q3、Q5がすべてON状態である上段回生状態において、電流検出抵抗Rに電流が流れた場合に、下段スイッチング素子Q2、Q4、Q6の少なくとも1つがON故障したと判定する。下段回生時異常判定手段104は、下段スイッチング素子Q2、Q4、Q6がすべてON状態である下段回生状態において、電流検出抵抗Rに電流が流れた場合に、上段スイッチング素子Q1、Q3、Q5の少なくとも1つがON故障したと判定する。
(もっと読む)
エレベータの制御装置
【課題】半導体素子の耐電圧を小さくしたり、スナバ回路の省力化を図りつつ、半導体素子の発熱を軽減することができるエレベータの制御装置を提供する。
【解決手段】エレベータのかごを駆動するモータに接続され、複数の半導体素子をスイッチングすることにより、供給された直流電力を交流電力に変換して、モータに供給するインバータと、複数の半導体素子のスイッチングを制御するスイッチング制御装置と、を備え、スイッチング制御装置は、複数の半導体素子のうち、少なくとも二つの半導体素子を予め設定された時間内にスイッチングさせるときは、少なくとも二つの半導体素子のスイッチング速度を通常速度よりも遅くするとともに、少なくとも二つの半導体素子以外の半導体素子のスイッチング速度を通常速度に維持する構成とした。
(もっと読む)
インバータ装置
【課題】バッテリの充電状況に応じてモータの回生電力を当該モータにて吸収しながら、モータが過熱することも防止できるインバータ装置を提供する。
【解決手段】制御装置11は、モータ6の回生電力によりバッテリ4を充電する際、当該バッテリの充電状態から充電可能な回生電力Wbを求め、目標制動トルクTとモータの回転数から最大回生電力Wmaxを求め、更に、モータの温度、外気温度、及び、走行速度からモータ自体で吸収可能な電力Wmを求めて、Wmax<Wbの場合、目標制動トルクTと最大回生電力Wmaxより目標界磁電流成分と目標トルク電流成分を求めてインバータ主回路を制御すると共に、Wb≦Wmaxの場合、(Wmax−Wb)<Wmとなるように目標制動トルクTを低減し、低減した目標制動トルクTと充電可能な回生電力Wbより目標界磁電流成分と目標トルク電流成分を求めてインバータ主回路3を制御する。
(もっと読む)
電動機駆動装置及び電動機駆動装置の制御方法ならびに電動装置
【課題】部品点数を減らしつつ、エネルギー変換効率を向上することが可能な電動機駆動装置を提供する。
【解決手段】電動機駆動装置(1、21〜23)は、交流電動機10に印加される電圧を調節することにより交流電動機10を駆動するインバータ3と、交流電動機10の複数のコイルが結線された中性点と、インバータ3の正極側母線または負極側母線との間に直流電圧を印加する直流電源2から供給され、かつインバータ3を経由する電流により充電されるコンデンサ4と、交流電動機10が指定された回転数で回転するように、インバータ3を制御する制御回路7とを有する。そして制御回路7は、交流電動機10に生じる誘起電圧と、直流電源2と、コンデンサ4の電圧との条件により弱め界磁制御と昇圧制御を使い分けてインバータ3を制御する。
(もっと読む)
電動機駆動方法
【課題】3相PWMインバータを用いて交流電動機および直流電動機の双方を駆動可能なものにおいて、交流電動機と直流電動機との切り替えを容易に行うことのできる電動機駆動方法を提供することを目的とする。
【解決手段】第1ステップとして3相PWMインバータ3の3相出力線63,64,65に直流電流を発生させ、3相出力線63,64,65の各相に流れる電流の総和が零であるかどうかを確認する。次に、第2ステップとして任意の2相の出力線63,64に直流電流を発生させ、この出力線63,64に流れる電流の和が零であるかどうかを確認し、第3ステップとして第2ステップで出力電流の和が零であると確認できた2相の出力線63,64とは別の1相の出力線65に流れる電流が零であるかどうかを確認する。上記第1〜3ステップの結果に基づいて、3相PWMインバータ3の3相出力線63,64,65に接続された電動機種別を判別する。
(もっと読む)
モータの制御装置及びそれを備えたモータシステム
【課題】省エネ化を図ることができるモータの制御装置及びそれを備えたモータシステムの提供を課題とする。
【解決手段】上記課題は、モータの誘起電圧が電源電圧よりも大きくなり、無効電流成分を含む駆動電力をモータに供給してモータの誘起電圧を抑えながらモータを駆動している最中に、電源からモータに対する電力供給をオフにする期間をインバータ装置によって間欠的に形成し、モータから出力されるモータトルクが零になるようにモータの駆動を制御することにより解決できる。電源からモータに対する電力供給のオフは、インバータ装置の全相の上アーム又は下アームのスイッチング半導体素子をオンさせる三相短絡制御によって実現できる。
(もっと読む)
電力変換装置
【課題】インバータ回路の負荷側の力率や出力電圧が変化した場合でも、スイッチング素子の温度変化を抑えられるような構成を得る。
【解決手段】スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)に流れる電流が略一定の場合には、インバータ回路(4)の負荷側の力率及び出力電圧に拘わらず、該スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)の温度が略一定になるように、該スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)を逆導通可能な構成とする。
(もっと読む)
電動駆動装置および電池パック
【課題】低速での回生制動量を増加できる電動駆動装置を提供する。
【解決手段】二次電池Eを電源としてインバータIによりモータMを駆動する電動駆動装置において、インバータIと二次電池Eの正極との間に設けられた第1スイッチング素子FET1と、一次巻線n1および二次巻線n2の各々の一端が第1スイッチング素子FETとインバータIとを結ぶ配線に接続されたトランスTと、トランスTの一次巻線n1の他端と二次電池Eの負極との間に接続された第2スイッチング素子FET2と、トランスTの二次巻線n2の他端から第1スイッチング素子FET1と二次電池Eとを結ぶ配線に二次電池を充電する方向の電流が流れるように接続されたダイオードD1と、インバータIからの回生電圧を昇圧させるように第1スイッチング素子FET1および第2スイッチング素子FET2を制御する制御回路22を備える。
(もっと読む)
最適化された運動プロフィールを用いた省エネルギー
エレベータシステムは、かごと、かごを昇降させる巻上モータと、かごの移動を制限するブレーキと、走行の目的階を選択する入力装置と、制御装置と、を備える。制御装置は、入力装置から命令を受け取り、巻上モータおよびブレーキの作動を制御する。制御装置は、走行について一組の組み合わされたエネルギー損を低減するように、かごの負荷、走行方向、および走行距離に従って変化する、走行についての速度プロフィールを制御装置が選択する、損失低減モードを有する。  (もっと読む)
(もっと読む)
モータの駆動装置
【課題】小型化のために平滑用コンデンサを小容量化した際、電圧が0V付近まで低下し、位置検出が行えず、安定した駆動が行えない。
【解決手段】脈動する母線電圧が予め定めた閾値より低下したと電圧判定手段114が判定したとき、インバータ105からモータ106へ印加される電圧を制御する制御手段114がモータ106への出力をモータ106が回生状態になるまで減少させることにより、コンデンサ103の容量を極めて小さくしても直流母線間の電圧が0V付近まで低下することがなくなり、位置検出を行うことができるため、安定した駆動を行うことができる。
(もっと読む)
交流電動機の制御装置
【課題】交流電動機に印加される矩形波電圧の電圧位相をトルク指令値に基づいて変化させるフィードフォワード制御について、演算処理の複雑化を招くことなく広いトルク制御範囲にわたって共通に適用できるような制御構成を提供する。
【解決手段】非線形特性を有するトルク特性線500において現在の動作点での接線の傾きに従った線形近似演算によって、トルク指令値に対するトルク補償量を解消するための位相変化量を求める。反転領域600,610では、接線の傾きが他の領域とは異なるため、位相変化量が本来とは反対の極性で算出される虞がある。このため、動作点を更新しつつ線形近似演算を複数回繰返す演算処理において、線形近似演算によって求められた接線の傾きが負であるときには、当該傾きを正の所定値に修正した上で、繰返演算を実行する。
(もっと読む)
交流電動機のセンサレス制御装置
【課題】 高速域で閉ループ速度制御及びq軸電流制御により高精度な速度及びトルク制御を行い、低速域でq軸電流ループの動作停止によりダンピングを改善し且つ一定速時や停止時の振動を抑圧することができる交流電動機のセンサレス制御装置を提供する。
【解決手段】 推定速度とF/F速度から速度制御器3がF/Bq軸電流指令を出力する。電動機の高速域では速度制御出力切替器7がF/B軸電流指令を出力し低速域では所定の固定値C1を出力する。dq軸電流制御器10、9は電流制御を行い、F/Bdp軸電圧指令を出力する。電動機の高速域ではq軸電流制御出力切替器12がF/Bq軸電圧指令を出力し、低速域では所定の固定値C2を出力する。電圧座標変換部14がdp軸電圧指令を変換して三相電圧指令を作成する。電動機16の電流を変換して電流座標変換部17がdq軸電流を出力し、速度推定器6がdp軸電流とdq軸電圧指令から推定速度を作成する。
(もっと読む)
電動機駆動装置の制御装置
【課題】直流電圧を交流電圧に変換して交流電動機に供給する直流交流変換部におけるスイッチング損失を低減して効率を高めることができると共に、目標トルクに応じたトルクを適切に電動機に出力させることが可能な電動機駆動装置の制御装置を提供する。
【解決手段】直流電圧Vdcに対する交流電圧指令値Vd、Vqの大きさを表す電圧指標Δmが所定の波形切替しきい値未満である場合には直流交流変換部にパルス幅変調制御を行わせ、電圧指標Δmが波形切替しきい値以上である場合には直流交流変換部に矩形波状電圧を出力させる矩形波制御を行わせる電圧波形制御部9、を備え、電圧指標Δmが波形切替しきい値未満である場合にも、所定の矩形波制御許可条件を満たす場合には、電圧波形制御部9は、直流交流変換部に矩形波制御を行わせ、界磁調整部8は、交流電動機の界磁磁束を強める強め界磁制御を行うように界磁調整指令値ΔIdを決定する。
(もっと読む)
洗濯機
【課題】運転の中断や停止が発生した場合でも、次回の運転開始時に、モータの出力トルクが不足することを回避できる洗濯機を提供する。
【解決手段】ドラムモータを構成するロータマグネットに着磁量を容易に変更可能なレベルの保磁力を有するアルニコ磁石を備え、制御回路が、インバータ回路を介して、アルニコ磁石の着磁量を変化させるように励磁電流を発生させ、洗濯機の運転を停止させる場合に(ステップS11)アルニコ磁石を増磁状態にする(ステップS12)。
(もっと読む)
モータの制御装置
【課題】コンバータによってインバータの直流側電圧を可変制御可能に構成されたモータの制御装置において、トルク制御性および効率をバランスさせるように矩形波電圧制御におけるコンバータの動作状態を適切に制御する。
【解決手段】矩形波電圧制御によって要求される電圧位相φvが、昇圧判定位相よりも大きくなるとコンバータに対して昇圧要求が発せられる。モータの必要トルクが大きいときには、インバータの直流側電圧VHが相対的に高く設定されることから、昇圧レートも高く設定される。昇圧レートが大きいときには昇圧判定位相を低く(φ0)設定するので、直流側電圧VHを早期に昇圧することにより高トルクの確保が容易となることによって、トルク制御性が向上される。一方、昇圧レートが小さいときには、昇圧判定位相が高く(φ2)されるので、コンバータをスイッチング損失が低い非昇圧モードで長期間動作させることができる。
(もっと読む)
車両用同期機制御装置
【課題】高速運転中、あいは減速運転中に一時的に電力供給が停止した場合でも運転を継続するための制御系を従来よりも簡素化するとともに、安定性や応答性を高め、低コスト化が実現可能な車両用同期機制御装置を提供する。
【解決手段】制御手段20は、永久磁石同期電動機11の高速運転中に電力供給が停止されると、インバータ10に対して永久磁石同期電動機11の誘起電圧がコンデンサ9の直流電圧を超えないように弱め界磁制御を継続するとともに、運転が円滑に継続されるようにトルク制御を行う。永久磁石同期電動機11の減速運転中に電力供給が停止されると、インバータ10に対してブレーキトルクの発生が継続するようにトルク制御を行うとともに、インバータ10の発生する電力が零になるように制御する。その場合、制御手段20は、d軸電流指令とq軸電流指令をそれぞれ独立して制御する。
(もっと読む)
負荷駆動システム
【課題】主電力変換器及び補助電力変換器に使用されるスイッチング素子の耐圧を等しくして素子の選定を容易にし、コストを低減する。
【解決手段】補助モータM1,M2を駆動する補助電力変換器Conv1,Conv2のうち少なくとも一部は電源電圧を昇圧してその直流中間回路に供給する昇圧機能を備え、前記直流中間回路を含む任意の正,負極間の直流中間回路に主電力変換器INVを接続して主モータMを駆動するシステムにおいて、主電力変換器INVの直流中間回路の両端を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の両端に接続し、主電力変換器INVの各相において直列接続された半導体スイッチング素子の個数を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の各相において直列接続されたスイッチング素子の個数と等しくする。
(もっと読む)
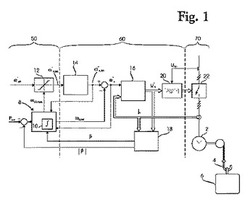
孤立交流電圧系統を有する設備のための駆動システム
孤立交流電圧系統(7)を有する設備のための、特に船舶又は海上プラットホームのための駆動システム(1)は、電動機としも発電機としも動作可能である駆動用3相交流電動機(8)と、中間回路電圧(UZ)を有する直流電流中間回路(5)を備えた電力変換装置(2)とを備えている。この駆動システム(1)では、孤立交流電圧系統における望ましくない又は許容できない電圧上昇および/または周波数上昇を回避することができなければならない。このために駆動システムは、本発明によれば、駆動用3相交流電動機(8)が発電機動作時に発生して電動機側変換器(4)を介して中間回路(5)に与える電気エネルギーの少なくとも一部を吸収するために中間回路(5)内に配置されたエネルギー吸収装置(20)を有する。このエネルギー吸収装置(20)は、好ましくは少なくとも1つの抵抗器からなる少なくとも1つのエネルギー吸収器(21)を含む。少なくとも1つのエネルギー吸収器(21)はエネルギー吸収装置(20)によって少なくとも中間回路電圧(UZ)の極性に依存して作動可能である。エネルギー吸収装置(20)は駆動用3相交流電動機(8)の電気制動出力の吸収に関して可変に構成されていると好ましい。 (もっと読む)
61 - 80 / 201
[ Back to top ]