
Fターム[5H505GG01]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 位置フィードバックするもの (175)
Fターム[5H505GG01]に分類される特許
1 - 20 / 175
無効電流指令作成部を有するモータ駆動装置
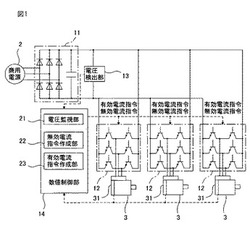
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
ロボットシステム

【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給することができるとともに、減速動作時にモータから生じる回生エネルギーを有効利用することを可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作、入力電圧の供給が遮断する電源遮断動作などを実行する。電源制御部26は、バス電圧の検出値に基づいて、モータMが加速動作状態であると判断される期間には昇圧動作を実行し、減速動作状態であると判断される期間には電源遮断動作を実行し、それらの期間を除く期間には降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、高トルク運転時にモータに対して十分な電力を供給可能とするか、または減速動作時にモータから生じる回生エネルギーを有効利用可能とする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。電源制御部26は、エコモードに設定されると、モータMの動作状態にかかわらず、降圧動作を実行するように昇降圧回路29の動作を制御する。電源制御部26は、トルク重視モードに設定されると、バス電圧の検出値に基づいてモータMが加速動作されていると考えられる期間に昇圧動作を実行するとともに、その期間を除く期間には非昇降圧動作を実行するように昇降圧回路29の動作を制御する。
(もっと読む)
ロボットを制御する制御装置
【課題】ロボットの制御装置の大型化を抑制しつつ、三相交流モータの駆動に伴う発熱を抑制する。
【解決手段】ロボットの制御装置は、インバータ回路と、ハイサイド側スイッチング素子駆動回路と、ローサイド側スイッチング素子駆動回路と、ハイサイド側スイッチング素子駆動回路に切り替え動作のための電力を供給するチャージポンプと、外部電源から電力の供給を受け、ローサイド側スイッチング素子駆動回路に切り替え動作のための電力を供給すると共に、オフ状態のハイサイド側スイッチング素子に対応するチャージポンプを充電する制御電源と、を備える。また、制御部は、各チャージポンプの充電量を特定し、充電量に基づき各スイッチング素子の状態の各組み合わせの選択可否を特定し、選択可能な組み合わせについて現在電流値に基づき将来の予測電流値を算出し、予測電流値と将来の目標電流値とに基づき1つの組み合わせを選択する。
(もっと読む)
交流電動機の制御装置
【課題】過渡電圧飽和に起因して生じ得る電動機の不安定現象を抑制すること。
【解決手段】交流電動機の制御装置は、速度指令を生成する位置制御器と、電流指令を生成する速度制御器と、電圧指令を生成する電流制御器と、q軸電圧方程式の過渡電圧成分に相当するq軸電圧飽和量ΔVqを算出するdi/dtリミッタ部と、q軸電圧飽和量ΔVqを用いて位置指令修正量ΔPを生成する飽和量F/B部105と、を備える。また、この飽和量F/B部105は、q軸電圧飽和量ΔVqを通過させ、その出力の換算値を位置指令修正量ΔPとして位置制御器の入力側にフィードバックするLPF121と、電動機の電気回路時定数の逆数相当値をLPF121の帯域を決定するフィルタ定数ωとしてLPF121に設定する帯域設定器122と、を備える。
(もっと読む)
回転電機制御装置
【課題】インバータを備えた回転電機駆動装置と直流電源部との接続が遮断された場合に、回転電機からインバータを介して回生される回生電力を迅速に低減させる。
【解決手段】回転電機の回転に同期して回転する2軸の直交ベクトル空間において、各軸に沿った界磁電流と駆動電流との合成ベクトルである電機子電流を制御してインバータを制御するインバータ制御部を備える。インバータ制御部は、直流電源部とインバータとの接続が遮断状態であると判定した場合には、回転電機の回生トルクがゼロとなるようにインバータを制御するゼロトルク制御を実行すると共に、遮断状態でのゼロトルク制御の実行に際して、回転電機の回生トルクをゼロに低下させていく際のトルク変化率ΔTの制限値を、直流電源部とインバータとの接続が維持されている状態でのトルク変化率ΔTの制限値LT1よりも大きい値に設定する。
(もっと読む)
電動弁駆動システム
【課題】無駄なエネルギー消費を抑制し、簡単な構成で電動弁を駆動することができる電動ボール弁駆動システムを提供する。
【解決手段】電動ボール弁駆動システム10は、目標開度Ndを設定する目標開度設定部11と、目標開度Ndとボール弁32の現在開度Naとを入力して両者間の開度差分ΔNを求める加算部13と、開度差分ΔNに基づいて単相誘導電動機31を駆動する駆動パルス幅を演算するパルス幅演算部14、ボール弁32のヒステリシス相当駆動時間を求めて駆動パルス幅を補正するヒステリシス補正部16と、求めた駆動パルス幅を有する駆動パルスをSSR20に出力する駆動パルス出力部19と、駆動パルスを単相誘導電動機31に出力し、単相誘導電動機31を駆動するSSR20と、を備える。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
モータ制御装置
【課題】平滑コンデンサからスナバコンデンサまで直接的に給電接続する特別な構成を設けることなくスナバコンデンサを十分に充電する。
【解決手段】平滑コンデンサ2と、2つのアームスイッチング素子11を直列に接続した組を3組並列に接続して3相としたインバータ部3と、インバータ部3の出力側に接続されたブレーキ回路整流器21と、ブレーキ回路整流器21に並列接続した制動抵抗器23と制動スイッチング素子22と、を有するダイナミックブレーキ回路部5と、制動スイッチング素子22に並列接続したスナバコンデンサ31を含むスナバ回路部6と、各アームスイッチング素子11に対するゲート信号と制動スイッチング素子22に対するブレーキ制動信号とを出力する駆動制御部7と、を備えるモータ制御装置100であって、駆動制御部7が、通常運転前に、ダイナミックブレーキを解除する処理を行い、スナバコンデンサ31を充電制御する処理を行う。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法
【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
アクチュエータ、モータ制御システム及びモータ制御方法
【課題】センサ総数を低減し、信頼性を向上したアクチュエータ、モータ制御システム及びモータ制御方法を提供する。
【解決手段】アクチュエータは、アクチュエータは、モータと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の位置を規制する位置規制機構と、被駆動機構の変位を検出する位置センサと、位置規制機構により被駆動機構の位置が規制された状態での位置センサの出力変動を温度情報へ変換する制御装置と、を含む。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
ロボットコントローラ
【課題】モータ回生時において発熱が一気に増えることを抑制し、しかも好適な状態でモータを駆動させる。
【解決手段】制御部13は、モータ減速期間において、コンデンサ28の充電により回生電力を回収させるとともに、コンデンサ28の充電電圧が所定の上限電圧に達した場合に、第2スイッチ33を閉じて回生抵抗32により回生電力を回収させる。また、制御部13は、モータ減速直前の等速期間において第1スイッチ31を繰り返し開閉させることにより、コンデンサ充電電圧を降下させる。この電圧降下制御では、モータ減速期間におけるモータ減速幅に基づいて、減速開始時のコンデンサ充電電圧である減速開始時電圧と、第1スイッチ31のスイッチング時間幅とを設定するとともに、第1スイッチ31の開閉状態を制御することにより減速開始時電圧までコンデンサ28の充電電圧を降下させる。
(もっと読む)
ロボット及びロボット駆動方法
【課題】コンデンサー電圧が過大にならないように回生エネルギーを簡便に蓄電する方法を提供する。
【解決手段】目標位置に向かって移動している可動部に対して、目標位置に向かう方向とは逆方向の駆動力である予備制動力を作用させて予備減速速度まで減速させる予備減速を行わせる予備減速工程S103により予備減速速度まで減速してから、目標位置に向かう方向とは逆方向の駆動力である制動力を作用させて減速させることにより、可動部を目標位置に停止させる減速停止工程S105により目標位置に停止する。この時、予備減速速度設定工程S101では、停止時でのコンデンサー電圧が最大管理電圧以下になるように予備減速速度を設定する。
(もっと読む)
モーター制御装置
【課題】電動モーターのTN特性を向上させる。
【解決手段】モーター制御装置であって、電動モーターに対して駆動電流の供給を制御する制御部と、前記電動モーターの回転速度を検知する回転速度検知部と、を備え、前記駆動電流は、d軸電流とq軸電流とを含んでおり、前記制御部は、前記電動モーターに対するトルク指令値に基づいて前記q軸電流の目標値であるq軸電流指令値を算出し、 前記電動モーターの回転速度と予め定められた前記電動モーターのベース回転速度との差と、前記算出したq軸電流指令値とを用いて前記d軸電流の目標値であるd軸電流指令値を算出し、前記d軸電流指令値と前記q軸電流指令値とを用いて前記電動モーターに対してベクトル制御を行う。
(もっと読む)
モータの磁極位置補正方法
【課題】ダイレクトドライブモータを採用した可動範囲が限定された駆動軸において、ダイレクトドライブモータと位置検出器の取付け誤差を制御装置内で補正する方法を提供する。
【解決手段】モータの磁極位置補正方法は、ダイレクトドライブモータの可動子を機械式ブレーキで拘束し(S9)、指令位置を現在位置と離れた位置に指令し(S10)、ダイレクトドライブモータのトルク指令値を検出し(S12)、トルク指令値と所定の閾値とを比較することにより磁極位置補正値を決定し(S14、S16)、前記決定された磁極位置補正値をメモリに記憶し(S18)、メモリに記憶した磁極位置補正値により求めた電気角オフセット値をモータ制御に用いる。
(もっと読む)
モータ制御方法
【課題】周期性負荷による周期的な回転速度変動等を抑制するに際し、変動抑制トルク制御を行うことができるモータの出力トルクの可制御域を拡げる。
【解決手段】変動抑制トルク制御では、周期性負荷となる圧縮機6によるモータ5の角速度ω等の変動を抑制すべく、基本波成分抽出部14にて角加速度αの基本波成分を抽出し、調整指令Ic*に基づいて振幅調整部15が動作する。減算部16は、平均電流指令Ia*から振幅調整部15の出力を減算して振幅指令Im*を出力する。電流位相指令作成部19は電圧指令V*の最大値がインバータ4の出力電圧の上限値に達したことに応答して、電流位相指令β*を進ませる。
(もっと読む)
モーター制御装置
【課題】電動モーターのTN特性を向上させる。
【解決手段】モーター制御装置であって、電動モーターに対して駆動電流の供給を制御する制御部と、前記電動モーターの回転速度を検知する回転速度検知部と、を備え、前記駆動電流は、d軸電流とq軸電流とを含んでおり、前記制御部は、前記電動モーターに対するトルク指令値に基づいて前記q軸電流の目標値であるq軸電流指令値を算出し、 前記電動モーターの回転速度と予め定められた前記電動モーターのベース回転速度との差と、前記算出したq軸電流指令値とを用いて前記d軸電流の目標値であるd軸電流指令値を算出し、前記d軸電流指令値と前記q軸電流指令値とを用いて前記電動モーターに対してベクトル制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】外乱の存在する環境下においても走行軌跡の乱れを抑えて円滑に自動制御を実行することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、二系統の独立したモータコイルに対応して設けられた二つの駆動回路26A,26Bと、これら各駆動回路26A,26Bに対して二系統の独立した制御信号Smc_a,Smc_bを出力するマイコン27とを備える。マイコン27は、アシスト力に対応したモータトルクを発生させるべく、電流制御を実行することにより第1系統の駆動回路26Aに対して制御信号Smc_aを出力する第1制御信号出力部31Aを備える。そして、更に、転舵輪の舵角を変更すべく車内ネットワークを介して上位ECUから入力される操舵角指令値θs*に基づいて、位置制御を実行することにより第2系統の駆動回路26Bに対して制御信号Smc_bを出力する第2制御信号出力部31Bを備える。
(もっと読む)
1 - 20 / 175
[ Back to top ]