
Fターム[5H505GG07]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 制御系を切り換えるもの (162)
Fターム[5H505GG07]に分類される特許
121 - 140 / 162
エレベーターの片系駆動方法および装置

【課題】2台の電力変換器を並列接続したセット並列構成の電力変換器で1巻線交流電動機を駆動するエレベーターにおいて、一方の電力変換器に故障が発生した場合においても、1巻線交流電動機に特有の出力側リアクトルの悪影響無く、片系駆動を実現し、休止させる回数を低減する。
【解決手段】故障した一方の電力変換器を切離し、出力側リアクトルの両端を短絡し、かつ二重星形結線の電動機巻線を各相二巻線直列接続に切替える。また、並列構成の電力変換器で1巻線交流電動機を駆動する場合に用いる制循環電流抑制制御から、健全な他方の電力変換器の単機運転制御に切替える。
(もっと読む)
モータ制御装置とモータ制御方法

【課題】3相モータのパラメータが変動した際であっても、安定した電流制御を行うことが可能なモータ制御装置を提供する。
【解決手段】3相モータ10の回転子に配設された永久磁石が発生する磁界の方向であるd軸及び前記d軸に直交するq軸の電圧指令値を3相各相の3相電圧指令値に変換し、3相電圧指令値に基づいた制御により3相モータ10を駆動するモータ駆動装置100は、3相各相のモータ電流をPWM制御によって制御するPWM制御部6と、所期の規範モデルに追従させるときの等価入力と切り替え面に拘束させるための制御入力とを決定し、PWM制御の周期と同期してスライディングモード制御を行うスライディングモード制御部5と、を備える。
(もっと読む)
車両用制御システム及び回転電機用端子台
【課題】回転電機の中性点を利用して外部との電力のやり取りを行う場合に、接続ケーブルによるサージ電圧の発生を抑制することである。
【解決手段】車両用制御システム10は、モータ・ジェネレータ14と、制御部50と、電源回路60と、外部接続ケーブル80とを備える。モータ・ジェネレータ14は端子台30を有し、端子台30には、固定子16の各相コイルの中性点から引き出された中性線28が接続される中性線端子29と、外部接続ケーブル80に接続される外部端子38と、中性線端子29と外部端子38との間の接続状態を非導通状態と導通状態との間で切り換えられるリレー40とが設けられる。制御部50は、中性点を利用し外部接続ケーブル80を用いて外部と電力のやり取りを行うときに、リレー40における接続状態を非導通状態から導通状態に切り換える。
(もっと読む)
ブラシレス直流励磁機を備えた同期モータの起動方法
界磁電流を最大許容励磁機固定子電流(すなわち、移行速度で主磁界に定格無負荷電流を生じさせることになる電流)に設定して、磁化電流を加え、固定子に磁束を生じさせることによって、モータを誘導モータとして起動することが可能になる、モータのための起動方法及びシステム。モータの固定子電流は、モータがいかなる静摩擦であろうと克服するのに十分な解放トルクを発生可能にする値に維持される。特定の移行速度でまたはある時間期間の経過後、駆動部が初期磁化電流を除去することによって誘導モータ制御から同期モータ制御への移行が開始され、その後、DC励磁機によってモータに界磁電流が加えられる。この移行が完了すると、駆動部は、所望の速度要求値まで一定比率で上昇させることが可能になる。 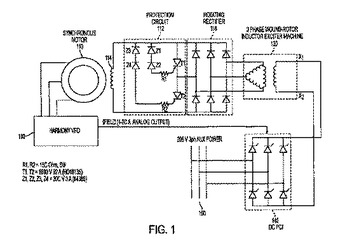 (もっと読む)
(もっと読む)
車両およびその制御方法
【課題】回転磁界により回転子を回転駆動する回転磁界制御と、固定磁界により回転子の回転を制限する固定磁界制御と、の間での電動機の制御の切り替えをより適正に行なう。
【解決手段】モータの制御を回転磁界制御から固定磁界制御に切り替えるときには、回転磁界制御における回転d軸および回転q軸の相電流Id2t,Iq2tを用いて電流指令Id2t*,Iq2t*および電圧指令Vd2t*,Vq2t*を設定すると共に(S510,S520)、設定した回転d軸および回転q軸の電流指令Id2t*,Iq2t*を固定磁界制御における固定d軸および固定q軸の電流指令Id2lo*,Iq2lo*に置き換え(S540)、回転d軸および回転q軸の電圧指令Vd2t*,Vq2t*を固定d軸および固定q軸の電流指令Vd2lo*,Vq2lo*に置き換えて(S550,S560)、モータを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを大型化することなく、簡素な構成にて出力性能の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン17(モータ制御信号生成部24)は、電流フィードバック制御を実行する各F/B制御部27d,27qに加え、オープン制御(オープンループ制御)を実行するオープン制御部31、及びこれら各制御部によるフィードバック制御及びオープン制御間の切替判定を実行する切替判定部32を備える。そして、モータ12に高速回転が要求される状況においては、電流フィードバック制御に基づくモータ制御信号の生成から、オープン制御の実行によるモータ制御信号の生成に切り替えるとともに、当該モータ制御信号の基礎となるduty指令値(オンduty比)の取り得る範囲(上限及び下限)を拡大する。
(もっと読む)
モータ駆動装置
【課題】モータをV/f制御によりセンサレス正弦波駆動する。
【解決手段】直流電源2を直流電力をインバータ回路3により交流電力に変換してモータ4を駆動しモータ負荷5を回転駆動し、電流検出手段6によりモータ電流のピーク値あるいは回転磁界に応じたモータ電流を検出し、所定値となるように制御手段7によりインバータ回路3の出力電圧を制御し、周波数補正手段76により安定化する。
(もっと読む)
交流電動機の駆動制御装置
【課題】この発明の目的は、制御モード切換機能を有する交流電動機の駆動制御装置において、制御モードの切換に伴うオフセット的な出力変動を抑制する。
【解決手段】トルク変動推定部510は、制御モード切換時に交流電動機M1の出力(トルク)が制御モード間のオフセットにより変動したことをバッテリ電流Ibの変動により検知して、バッテリ電流変動量に基づいて直流電源からの出力電力変動をトルク変動に換算して、トルク指令値の必要修正量ΔTrq♯を算出する。修正演算部520は、本来のトルク指令値Trqcomおよびトルク変動量推定部510により算出された必要修正ΔTrqの演算により、制御モード切換後の制御モードにおけるトルク指令値Trqcom♯を発生する。
(もっと読む)
電動機駆動装置および電動機駆動方法並びに冷凍空調装置
【課題】スター結線とデルタ結線を切替えて電動機駆動を行う際、高効率駆動及び高速・過負荷運転を行え、且つ減磁保護を信頼性高く行える電動機駆動装置および電動機駆動方法並びに冷凍空調装置を得る。
【解決手段】インバータ制御部30は、周波数指令または外部切替信号のいずれかに基づいて、電動機11の固定子巻線15a〜cをスター結線あるいはデルタ結線のいずれかに切替える結線切替リレー21a〜c、22a〜cを制御して電動機11の結線を切替え、CPU31は、電流検出素子3が検出したインバータ出力電流および直流母線電圧に基づき、切替え後の結線仕様に合った電動機定数と過電流保護レベルと異常電圧保護レベルの少なくとも1つを設定し、PWM発生手段32は、CPU31によって設定された電動機定数と過電流保護レベルと異常電圧保護レベルに基づき、インバータ主回路2をPWM制御する。
(もっと読む)
交流電動機の制御装置
【課題】交流電動機をインバータ駆動する際、電流検出器の電流変換ゲイン補正係数を簡便に求めることができる交流電動機の制御装置を提供する。
【解決手段】インバータ装置4から出力される各相電流を検出する電流検出器10a−10cと、電流検出器により検出される検出値に補正係数を乗じて電流検出値の補正を行う誤差補正演算器21a,21bと、外部からの補正指令に基づいて前記補正係数の測定、算出を行う係数計算器22と、電圧指令に基づいてインバータ装置をPWM制御する信号を発生するPWM信号発生器19と、外部からの補正指令の入力時に、電圧指令を前記係数計算器から出力される補正係数の測定用の値に切り替える信号スイッチ23とを備え、係数計算器は、ある相の補正係数を求める際に、その相および基準相の電流検出値以外に、その他の相の電流検出値をも用いて計算を行う。
(もっと読む)
交流電動機の駆動制御装置
【課題】交流電動機の運転状態や要求されるトルクに応じて磁束基準のパターンを変化させ、交流電動機の1次電流が交流電動機駆動用インバータの定格電流値の一定程度以上となるようにし、定常運転時における1次電流の検出精度を向上させ、トルク制御精度を上げる。
【解決手段】交流電動機に対する速度指令を元に運転状態を検出する運転状態判定手段19と、加減速中および定速運転中のそれぞれにおける磁束基準パターンを有し、交流電動機に対する速度指令から加減速中又は定速運転中を判定し、判定結果に基づいて磁束基準パターンを切換える磁束基準パターン選択回路20とを備え、加減速中および定速運転中にかかわらず交流電動機の1次電流を交流電動機駆動用インバータ制御装置の定格に対して一定以上の割合となるように制御する。
(もっと読む)
電動パワーステアリング制御装置
【課題】モータ駆動回路に故障が生じても運転者に不快感と不安感を与えることのない電動パワーステアリング制御装置を、大型化および高コスト化を招くことなく提供する。
【解決手段】電源5との間、及びモータ4との間にそれぞれ開閉スイッチS21〜S24を付設し、MCU10から出力される電流制御値Eに基づいてモータの駆動電流を生成する主モータ駆動回路20と、電源5との間、及びモータ4との間にそれぞれ開閉スイッチS31〜S34を付設し、主モータ駆動回路20より小さいモータ駆動電流を生成する副モータ駆動回路31を備える。 主電流検出回路22で検出したモータ電流をMCU10で監視し、モータ電流の異常値から主モータ駆動回路20が故障したと判定した場合は、開閉スイッチS21〜S24を開放し、開閉スイッチS31〜S34を閉成して、副モータ駆動回路31でモータ4を駆動する。
(もっと読む)
モータ制御装置、モータ制御方法および車両駆動装置
【課題】交流モータに入力される電圧が低下した場合においても、交流モータのハッチングの発生を抑制することができるようにする。
【解決手段】インバータ14に供給される直流電圧Vdcが閾値以下でかつ発電機11が不安定領域にあるという条件を満たす場合、切替判定部34はスイッチ35に切替信号Rsを出力するとともに、PWM制御部37に変調率指令信号Rhを出力し、オープン制御部32から出力されたq軸電圧の指令値Vq2*をスイッチ35にて選択し、q軸電圧の指令値Vq*としてdq/uvw変換部36に出力するとともに、PWM制御部37は、変調率を一定に保ちながら、インバータ14をPWM制御する。
(もっと読む)
電力変換装置およびこれを用いた空気調和機
【課題】モータの端子間の印加電圧をインバータの直流電圧以下とすることによって低速運転時でのモータ駆動効率の向上と低騒音化を可能とする電力変換装置を提供する。
【解決手段】直流端子間に接続され中性点出力端子を備えた2つの直流電源と、直流端子間にそれぞれ同一極性にて直列接続された3組の上下アームと、各組の上アームと下アームとの3つの接続点と中性点出力端子との間に各々接続された双方向性スイッチからなる3組の中間アームと、3つの接続点に接続された三相モータとからなる主回路装置と、いずれか1相の上下アームを交互にオン状態に固定し、パルス幅変調を行って残りの2相の上・下・中間アームの各々の駆動信号を生成し、オン・オフ制御を行う主回路制御手段とを備えた電力変換装置において、主回路制御手段は、パルス幅変調によって得られるデューティ比が50%以下の場合には、2倍のデューティ比で中間アームをオン・オフする。
(もっと読む)
モータ駆動装置、ブラシレスモータ及びその駆動方法
【課題】電源電圧の昇圧によるデバイス破壊を防止し、高効率にモータを駆動することができるモータ駆動装置を提供する。
【解決手段】位置検出回路7と、駆動コイル1A〜1Cの通電切り替えタイミング信号を出力する通電信号生成回路6と、一定回転検出信号を出力する速度偏差検出回路9と、速度制御信号を出力する回転速度制御回路8と、電源電圧が供給される正極側駆動トランジスタ2A〜2Cと、抵抗を介して接地される負極側駆動トランジスタ3A〜3Cと、電源電圧をモニタし駆動モード切り替え信号を出力する電源監視回路5と、前記正極側駆動トランジスタ及び前記負極側駆動トランジスタのオン/オフ制御を行う出力PWM制御部4と、を備え、出力PWM制御部4は前記駆動モード切り替え信号に基づいて同期整流PWM駆動から片側PWM駆動に切り替える。
(もっと読む)
電気推進装置の推進制御方法および装置
【課題】蓄電池およびこの電池を充電する発電機からなるハイブリッド電源を備えた船舶の電気推進装置おいて、特に、電池のみの運転するモードで、電池電圧を監視して、電池電圧の低下を防止し、電気推進装置がシステムダウンに至ることがないようにするための電気推進装置の制御方法および装置を提供する。
【解決手段】推進電動機の入力電圧とこの入力電圧の許容される最低電圧として設定された制限電圧とを比較し、前記入力電圧が前記制限電圧より高いときは、推進電動機の速度を指令速度に保つように制御し、前記入力電圧が制限電圧より低下したときは、推進電動機の入力電圧が制限電圧以下に低下しないように制御する。
(もっと読む)
電力変換装置
【課題】低ノイズ化、低コスト化および高効率化を図ること。
【解決手段】整流回路(2)のスイッチングレグ(leg4)と、インバータ回路(5)の二相結線動作時に動作させるスイッチングレグ(leg2,leg3)とには、SiC素子のスイッチング素子が用いられている。そして、これら3つのスイッチングレグ(leg2,leg3,leg4)が単一のモジュールで実装されている。
(もっと読む)
多相モータの駆動システム
【課題】本発明は、大きな部品を用いることなく多相モータが誤作動することを抑制できる多相モータの駆動システムを提供する。
【解決手段】三相モータ10の駆動システム20では、第1〜3の電力線51〜53の第1〜3のチップ55〜57内の情報を、第1〜3のモータ側情報読み取り部14〜16と第1〜3の制御装置側情報読み取り部37〜39とで読み取る。読み取った情報に基づいて端子認識部40が第1〜3の制御装置側端子34〜36のうち、モータ側U端子11、モータ側V端子12、モータ側W端子13に電気的に接続されるものを認識する。端子設定部41が端子認識部40の認識結果に基づいて、モータ側U端子11、モータ側V端子12、モータ側W端子13に印加される交流電圧の位相のずれが正規なずれになるように、第1〜3の制御装置側端子34〜37に印加される交流電圧のずれの順番を設定する。
(もっと読む)
モータ制御装置
【課題】演算用パラメータ調整の容易化等に寄与しうる、制御の切替え機能付きのモータ制御装置を提供する。
【解決手段】最大トルク制御を実現する際における電流ベクトルの向きと向きが一致する回転軸をqm軸とし、そのqm軸に直交する回転軸をdm軸とする。モータ制御装置は、回転子の回転速度に応じて、低速用センサレス制御と高速用センサレス制御を切替えて実行する。低速用センサレス制御では、モータの磁気突極性を利用し、高周波の回転電圧注入等によってd−q軸を推定する。高速用センサレス制御では、回転子の回転によって生じる誘起電圧等に基づいてdm−qm軸を推定する。高速用センサレス制御の実行時において、γ(dm)軸電流はδ(qm)軸電流に関係なくゼロに維持される。
(もっと読む)
同期モータ制御装置
【課題】演算負担増大を抑止しつつ円滑な他制制御から自制制御への切り換えを実現すること。
【解決手段】電機子電流ベクトルのγ軸電流成分であるγ軸電流Iγの大きさ、又は、電機子電流ベクトルのγ軸に対する位相角に基づいて他制制御部から自制制御への切り換えを行う。
(もっと読む)
121 - 140 / 162
[ Back to top ]