
Fターム[5H505LL41]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 回転子の位置 (1,311)
Fターム[5H505LL41]に分類される特許
201 - 220 / 1,311
電動パワーステアリング装置
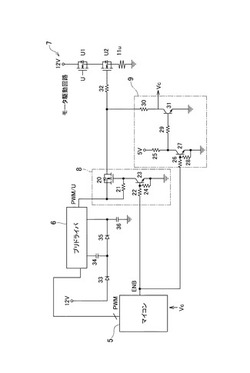
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
永久磁石同期電動機の制御装置

【課題】高周波電圧を印加することにより高周波電流を流して磁極位置を推定する構成において、高周波電流の検出誤差の影響を受けにくい永久磁石同期電動機の制御装置を提供する。
【解決手段】実施形態によれば、印加する高周波電圧の半周期を電流検出周期のN倍(N=1、2、…)となるように選択し、その高周波電圧の位相を(2π)÷(2N)を単位とする離散的な位相として取り扱い、この離散的な位相の正弦波状関数の電圧成分をD軸電圧に重畳する。離散的な位相の余弦波状関数の極性反転信号を、検出したD軸電流およびQ軸電流のうち少なくともQ軸電流に乗算し、その乗算値を高周波電圧のM周期(M=1、2、…)にわたり加算して、推定磁極位置の誤差情報を含む位置誤差抽出量を演算する。位置誤差抽出量に基づいて推定磁極位置の誤差を打ち消すように出力周波数を収束演算する。
(もっと読む)
車両駆動モータ制御装置
【課題】駆動電圧の低下によるモータのトルクの低下を抑えつつ、モータの状態及びモータが置かれている環境に応じて、インバータに含まれるスイッチング素子のスイッチングによって発生し得る電圧ストレスを低減することが可能な車両駆動モータの制御装置を提供する。
【解決手段】インバータ14はスイッチング素子Q1〜Q6を備え、スイッチング素子Q1〜Q6をオン/オフすることにより、バッテリ10からの直流電圧を交流電圧に変換してモータ16に供給する。制御装置20は、モータ16の温度が高くなり、モータ16が置かれている空間の気圧が低くなるほど、スイッチング素子Q1〜Q6のオン期間及びオフ期間のうち少なくとも一方の期間の長さを増大して、スイッチング素子Q1〜Q6のスイッチングを制御する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算負荷の増加を抑えつつ、インバータ出力の高い状態においても、精度良く、検出される各相電流値に基づいて異常検出を行うことのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、所定数αの電流検出周期に亘って、検出された各相電流値Ix(x=u,v,w)をその電流検出周期毎に記憶する(Ix_1,…,Ix_n、但し、「n」は自然数)。そして、当該所定数αの電流検出周期が経過した後、まとめて、その記憶領域に記憶した各相電流値Ix_1,…,Ix_nについて、三相(U,V,W)の総和に基づく異常判定をまとめて実行する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ巻線の抵抗を通して電源リップル吸収用コンデンサに蓄積された電荷を放電させる際に、モータが回転しないようにし、運転者に不快感を与えない電動パワーステアリング装置を提供する。
【解決手段】駆動制御部15は、モータ1に流す駆動電流指令値を、d−q座標系に変換した電流値指令値Id*,Iq*により付与し、電源リレー11が非導通状態に変化した後に、d軸の電流指令値Id*を所定値とし、q軸の電流指令値Iq*を0とするとともに、モータ回転角センサ5から検出したモータ回転角θを検出値に固定し、モータ制御信号を生成するモータ制御信号出力部16により、電流リップル吸収用のコンデンサ12に蓄積された電荷をモータ1の巻線の一部を通して流した。
(もっと読む)
ロボットコントローラ
【課題】モータ回生時において発熱が一気に増えることを抑制し、しかも好適な状態でモータを駆動させる。
【解決手段】制御部13は、モータ減速期間において、コンデンサ28の充電により回生電力を回収させるとともに、コンデンサ28の充電電圧が所定の上限電圧に達した場合に、第2スイッチ33を閉じて回生抵抗32により回生電力を回収させる。また、制御部13は、モータ減速直前の等速期間において第1スイッチ31を繰り返し開閉させることにより、コンデンサ充電電圧を降下させる。この電圧降下制御では、モータ減速期間におけるモータ減速幅に基づいて、減速開始時のコンデンサ充電電圧である減速開始時電圧と、第1スイッチ31のスイッチング時間幅とを設定するとともに、第1スイッチ31の開閉状態を制御することにより減速開始時電圧までコンデンサ28の充電電圧を降下させる。
(もっと読む)
電力変換装置
【課題】小容量のコンデンサを有する電力変換装置において、モータの回生動作に起因する過電圧を防止する。
【解決手段】電力変換装置は、モータ(5)の出力トルクに上記交流電源(6)の出力電圧の脈動成分を重畳させるように、該モータ(5)の出力トルクを脈動させる制御部(40)とを備え、制御部(40)は、モータ(5)の出力トルクがマイナスとならないように、モータ(5)の出力トルクを制限する制限部(60)を備える。
(もっと読む)
電力変換器の制御装置
【課題】電圧指令位相を参照してPWM制御を行いスイッチング素子へのスイッチングパターンを決定するPWM制御方式にあって、制御系の精度が向上し、制御系の安定化が達成される電力変換器の制御装置を得ることを目的とする。
【解決手段】電圧指令位相・振幅演算部1jは、電圧指令1iと回転座標変換用位相信号1cとを入力し、そのベクトル位相角を演算し、このベクトル位相角にローパスフィルタ処理を行い該処理後の信号と回転座標変換用位相信号1cとを加算し、該加算後の信号1kと電圧指令振幅1lとを同期PWM制御部1mに送出し、この同期PWM制御部1mは、電圧指令位相1kと電圧指令振幅1lとを入力して同期PWM制御を行いスイッチング素子へのスイッチング指令1aを出力する。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
回転機の制御装置
【課題】出力電圧ベクトルのノルムを要求トルクに応じて一義的に定めるものにあっては、これに基づき永久磁石の磁束異常の有無を判断することが困難なこと。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータIVの出力電圧ベクトルのノルムを設定する。位相設定部28では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部38では、ノルム設定部30によって設定されたノルムVnと、位相設定部28によって設定された位相δとに基づき操作信号を生成してインバータIVに出力する。位相δの値に基づき、モータジェネレータ10の永久磁石の異常の有無を判断する。
(もっと読む)
回転機の制御装置
【課題】電流センサに誤差がある場合、電流センサによる検出値を電流の初期値として用いることでモデル予測制御の制御性が低下すること。
【解決手段】指令電流idr,iqrおよび電気角θは、モデル予測制御部30の入力となる。モデル予測制御部30では、これら入力パラメータに基づき、インバータIVの操作状態を規定する電圧ベクトルViを決定し、操作部26に入力する。操作部26では、入力された電圧ベクトルViに基づき、上記操作信号を生成してインバータIVに出力する。モデル予測制御部30では、操作状態決定部34において、指令電流idr,iqrと予測電流ide,iqeとの乖離が小さいものに対応する電圧ベクトルViを選択する。ここで、予測電流ide,iqeの算出に際して用いる電流の初期値を、前回の予測電流ide,iqeとする。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
ロボット及びロボット駆動方法
【課題】コンデンサー電圧が過大にならないように回生エネルギーを簡便に蓄電する方法を提供する。
【解決手段】目標位置に向かって移動している可動部に対して、目標位置に向かう方向とは逆方向の駆動力である予備制動力を作用させて予備減速速度まで減速させる予備減速を行わせる予備減速工程S103により予備減速速度まで減速してから、目標位置に向かう方向とは逆方向の駆動力である制動力を作用させて減速させることにより、可動部を目標位置に停止させる減速停止工程S105により目標位置に停止する。この時、予備減速速度設定工程S101では、停止時でのコンデンサー電圧が最大管理電圧以下になるように予備減速速度を設定する。
(もっと読む)
変換器の制御方法
【課題】高速度の制御応答、特に高速度のトルク応答と低い高調波歪みを変換器に与えること。
【解決手段】電気システム10の変換器12は、ある第1の最適化目標に関して決定されている変換器12の切換えシーケンスが第2のステップで変更されるように制御され、第2のステップでは切換えシーケンスはさらに切換えシーケンスの第1の最適化が基づいている仮定の結果である可能性がある磁束誤差を補正することにより最適化される。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モーター制御装置
【課題】電動モーターのTN特性を向上させる。
【解決手段】モーター制御装置であって、電動モーターに対して駆動電流の供給を制御する制御部と、前記電動モーターの回転速度を検知する回転速度検知部と、を備え、前記駆動電流は、d軸電流とq軸電流とを含んでおり、前記制御部は、前記電動モーターに対するトルク指令値に基づいて前記q軸電流の目標値であるq軸電流指令値を算出し、 前記電動モーターの回転速度と予め定められた前記電動モーターのベース回転速度との差と、前記算出したq軸電流指令値とを用いて前記d軸電流の目標値であるd軸電流指令値を算出し、前記d軸電流指令値と前記q軸電流指令値とを用いて前記電動モーターに対してベクトル制御を行う。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
モータ制御装置及び電気機器
【課題】騒音発生を抑制しつつモータの高効率運転を実現する。
【解決手段】モータ印加電圧に対する電圧指令振幅V*とモータ1の回転速度ωとに基づき位相進め角δを算出し、モータ印加電圧の位相(モータ1の出力電圧ベクトルの位相)を位相進め角δに合わせる電圧位相制御モードと、インバータ2及び直流電源4間の電流センサ5の出力信号からモータ1の三相電流を検出し、検出電流値に基づきモータ1のベクトル制御を行うベクトル制御モードと、を選択的に機能させる。モータ1の回転速度ω(又はモータ印加電圧の大きさ)が比較的小さいときには電圧位相制御モードにてモータ制御を成し、モータ1の回転速度ω(又はモータ印加電圧の大きさ)が比較的大きいときにはベクトル制御モードにてモータ制御を成す。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧指令値を制限する相電圧指令制限値を算出するモータ電圧指令制限値算出手段13と、相電圧指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
201 - 220 / 1,311
[ Back to top ]