
Fターム[5H505LL58]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | レゾルバ (339)
Fターム[5H505LL58]に分類される特許
121 - 140 / 339
電流検出装置

【課題】電流が流れる導体に表皮効果が生じても、精度良く当該導体に流れる電流を検出可能な電流検出装置を提供する。
【解決手段】導体の近傍に設置され、所定の磁束検出方向の磁束を検出するセンサ部6と、センサ部6の検出値に基づいて導体を流れる電流を検出する電流検出部3と、導体を流れる電流の周波数である電流周波数を取得する電流周波数取得部4と、電流周波数に基づいてセンサ部6の検出値を補正する補正部5とを備える。
(もっと読む)
エレベータを駆動する誘導電動機の2次時定数測定方法およびシステム

【課題】エレベータを駆動する誘導電動機の2次時定数を正確に測定する方法およびシステムを提供する。
【解決手段】先ず、乗りかごを一定速度で走行させるときに誘導電動機の負荷が0となると見積もられたウェイトを乗りかごに積載した状態で、乗りかごを一定速度で走行させている時に、誘導電動機に電力を供給する電力変換器を制御する制御回路における電流指令値を0に切り換え、零電流制御を開始する。この時点における制御回路の出力電圧値をVstartとし、時定数測定の終了の基準となる出力電圧値として、Vstartの1/eの目標電圧値Vendを設定する。次に、制御回路の出力電圧値が目標電圧Vendに達するまで、カウンタの値をインクリメントする。出力電圧値が目標電圧Vendに達した時点におけるカウント値に対応する時間を誘導電動機の2次時定数として求める。
(もっと読む)
電動機駆動装置の制御装置
【課題】交流電動機に供給する電流の指令値に対する界磁調整値が、交流電動機の運転状態に応じて適切な値となるように制御できる電動機駆動装置の制御装置を実現する。
【解決手段】電源電圧を変換して所望のシステム電圧を生成する電圧変換部と、直流電力を交流電力に変換して交流電動機に供給する直流交流変換部と、を備えた電動機駆動装置の制御装置であって、直流交流変換部から交流電動機に供給される電流と電流指令値とに基づいて検出される実界磁調整値ΔIdr、又は界磁調整指令値ΔIdを、対象界磁調整値として取得する対象界磁調整値取得部31と、交流電動機の目標トルクTM及び回転速度ωに基づいて、前記対象界磁調整値の制御目標値である目標界磁調整値ΔIdtを決定する目標界磁調整値決定部32と、前記対象界磁調整値を目標界磁調整値ΔIdtに一致させるようにシステム電圧指令値Vdctを決定するシステム電圧決定部と、を備える。
(もっと読む)
モータの制御装置
【課題】モータの環状の2ロータが内外に出力軸に対して同軸に配置される二重構造において両ロータ間の位相差を変更する機構を小型化することができ、これによってモータ全体を小型化すること。
【解決手段】ステータ14の内周側に配置され、永久磁石12aを有して界磁束を発生する外側ロータ12と、永久磁石11aを有し、外側ロータ12に対する相対角度位置により界磁束を調整する内側ロータ11とを有するモータ10であって、ECU25cが、両ロータ11,12間の位相差を変更する際に、両ロータ11,12間に生じる磁力トルクを打ち消すトルクを発生させるようにステータ14に界磁電流を流し、更に、その磁力トルクの打ち消し後に内側ロータ11を回転させるトルクを発生するように当該界磁電流を強める制御を行う。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムの制御部において、余分な演算処理による負荷を軽減しつつ滑らかに制御モードの切り替えを行うことである。
【解決手段】PWM制御モードと矩形波制御モードのモード切替を滑らかに行いながら回転電機17を制御する回転電機制御システム10において、回転電機17の回転数が所定の回転数閾値よりも小さいときは、PWM制御モード及び矩形波制御モードのそれぞれの制御モードのための演算を行い、回転電機17の回転数が所定の回転数閾値よりも大きいときは、矩形波制御モードのための演算を行い、PWM制御モードのための演算は停止する制御部21を備える。
(もっと読む)
回転位置検出装置およびそれを用いたモータ駆動システム
【課題】低コストで信頼性が高く、かつ、小型化が容易な回転位置検出装置を提供する。
【解決手段】レゾルバ1は、ブリッジ回路を構成するように接続された4組のコイルL1〜L4を有するステータと、コイルL1〜L4のインダクタンスを正弦波状に変化させることが可能な形状を有するロータとを備える。励磁回路18は、基準パルス信号emに基づく励磁パルス信号をレゾルバ1に供給する。信号処理手段7は、基準パルス信号emを生成する処理と、基準パルス信号emあるいは基準パルス信号emを分周した信号に同期したA/D変換タイミング信号を生成する処理と、A/D変換タイミング信号に応じてレゾルバ1の出力信号をA/D変換する処理と、A/D変換処理結果に基づいてレゾルバ1のロータの回転位置を演算する処理とを実行するマイクロプロセッサを備える。
(もっと読む)
交流モータの制御装置
【課題】オフセット電流の発生を抑えつつ、より高回転まで矩形波制御が可能な交流モータの制御装置を提供する。
【解決手段】制御装置30は、センサ25の出力に基づいて定まる電気角の1周期内において、各相のスイッチング基準位相に対しての各相の矩形波電圧の電圧位相の変化量をスイッチングごとに等しく増加または減少させる。制御装置30は、電気角の2周期以上の所定周期ごとに矩形波電圧の電圧位相変化の合計量を算出する第1の制御部と、所定周期に一度の割合で合計量に関連する情報を第1の制御部から受取り、各相のスイッチング基準位相に対する位相差を更新する第2の制御部とを含む。第2の制御部は、各相のスイッチング基準位相に対する第n番目のスイッチングの位相差を、合計量を所定周期内のスイッチング回数で除算した単位増減量のn倍に設定する。
(もっと読む)
永久磁石モータのトルクリプル抑制制御装置、電動パワーステアリングシステム
【課題】トルクリプルの直流成分を有効に使うことができるトルクリプル抑制制御装置および電動パワーステアリングシステムを提供する。
【解決手段】誘起電圧係数設定部8は、位置検出器5からの位置検出値θdcに基づいて永久磁石モータ1の誘起電圧係数に関する情報信号Ked,−Ked,−ΔKed,Keqおよび−ΔKeqを出力する。トルクリプル抑制演算部9は、この各情報信号に基づいて電流補正指令値ΔId*,ΔIq*を出力する。電流補正指令値ΔId*,ΔIq*は、電流指令変換部7からの電流指令値Id0*,Iq0*と加算され、電流指令値Id*,Iq*として電流制御演算部10へ出力される。電流制御演算部10は、電流検出値Idc,Iqcに基づいて電圧指令値Vdc*,Vqc*を座標変換部11へ出力する。座標変換部11は、電圧指令値Vdc*,Vqc*と位置検出値θdcを用いて三相交流の電圧指令値vu*,vv*,vw*を電力変換器2へ出力する。
(もっと読む)
モータドライブシステム
【課題】可変磁束モータの磁束を変化させるための磁化電流を流す際におけるインバータの直流側回路の負担を軽減することのできるモータドライブシステムを提供することにある。
【解決手段】直流電源5から供給される直流電力Vdcを変換し、可変磁束モータ2を駆動するインバータ4を制御する制御部10であって、可変磁束モータ2の磁束を変化させる磁化電流Idを制御するための磁化電流指令値IdRmgを演算し、磁化するために磁化電流Idを流す場合、インバータ4の直流電圧Vdcを昇圧するために、トルク電流Iqを制御するためのトルク電流指令値IqRAVRを演算し、磁化電流指令値IdRmg及びトルク電流指令値IqRAVRに基づいて、インバータ4を制御する。
(もっと読む)
モータ制御装置
【課題】 回転角センサの組み付け誤差を、可及的速やかに検出するモータ制御装置を提供する。
【解決手段】 モータ電気角演算部16にて、組み付けオフセット角度演算を行う。具体的には、γ軸の電流値を「0」とし、無負荷の定常回転状態を作り出して、γ−δ軸の電圧方程式から、組み付けオフセット角度θofである誤差角度Δθを補正値として算出する。このとき、モータ30がSPMであることから、d軸及びq軸のインダクタンスLd,Lqを等しいとみなすことによって電圧方程式を簡略化した。さらに、γ軸の電流値Iγを「0」とした無負荷の定常回転状態であることによって電圧方程式を簡略化した。
(もっと読む)
モータ装置および電動パワーステアリング装置
【課題】3相交流式電動モータの1相に異常が発生したとき、正常な2相のみに通電するモータ装置において、簡単な構造で、電動モータのトルクリップルの低減を図り、電動モータにより駆動される駆動対象の作動安定性の向上を図る。
【解決手段】モータ装置20は、電動モータ21の3相の各巻線22u,22v,22wに通電する駆動回路31を制御する駆動制御装置30を備える。異常相検出手段45により異常相が検出されたとき、駆動制御装置30の位相変更手段35は、巻線22u,22v,22wのうちで、異常相の巻線への通電を停止すると共に異常相以外の正常な2相の巻線に通電するように駆動回路31を制御し、かつ、2相作動時の電動モータ21のトルクリップルを、2相の通電位相差を3相が正常であるときの正常時位相差としたときよりも低減すべく、2相の通電位相差を正常時位相差とは異なる異常時位相差に変更する。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】電圧利用率を改善しつつ、デューティ制約を満たすことができるモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】直流電源41に接続された3相モータ12を駆動するモータ駆動回路40と、3相モータのモータ電流を検出する単一のモータ電流検出部42と、モータ電流検出値に基づいて3相モータの各相電流値を求める各相電流演算部35と、電流指令値を演算するモータ電流指令部34と、演算した電流指令値と前記各相電流値との電流偏差に応じて3相駆動電圧値を演算する3相駆動電圧演算部37と、電圧利用率改善及び3相駆動電圧波形補正を行う補正演算式に従って前記3相駆動電圧値を補正して3相駆動電圧補正値を演算する3相駆動電圧補正部38と、演算した3相駆動電圧補正値に基づいて前記モータ駆動回路を制御するパルス幅変調信号を生成するパルス幅変調信号生成部39とを備えている。
(もっと読む)
回転電機の減磁判定システム
【課題】回転電機の運転状態に拘わらず精度良く、永久磁石の減磁を判定する技術を提供する。
【解決手段】減磁判定システム10は、永久磁石型の回転電機の多相コイルに流れる電流を永久磁石が発生する磁界の方向であるd軸と当該d軸に直交するq軸とのベクトル成分に座標変換してフィードバック制御する際のq軸目標電圧を実q軸電圧vqとして取得する実q軸電圧取得部1と、永久磁石に減磁が生じていない状態でのq軸目標電圧を基準q軸電圧vqrとして取得する基準q軸電圧取得部2と、少なくとも力行運転状態か回生運転状態かの区分を表す運転状態区分と実q軸電圧vqと基準q軸電圧vqrとに基づいて永久磁石の減磁の状態を判定する減磁判定部7とを備える。
(もっと読む)
電動機駆動装置の制御装置
【課題】動作点範囲が大きくなり得る交流電動機を制御するのに好適な電動機駆動装置の制御装置を提供する。
【解決手段】電流制御部と、電圧制御部と、電流制御周期Piを交流電動機の目標トルクTMに基づいて決定する電流制御周期決定部と、電圧制御周期Pvを交流電動機の回転速度ωに基づいて決定する電圧制御周期決定部と、電流制御周期決定部及び電圧制御周期決定部の決定に基づいて、電流制御周期Pi及び電圧制御周期Pvを設定する制御周期設定部と、を備え、電流制御周期決定部は、目標トルクTMが小さくなるに従って連続的又は段階的に長くなる値を、目標トルクTMに応じて電流制御周期Piとして決定し、電圧制御周期決定部は、回転速度ωが低くなるに従って連続的又は段階的に長くなる値を、回転速度ωに応じて電圧制御周期Pvとして決定する。
(もっと読む)
電動機駆動装置の制御装置
【課題】交流電動機の界磁磁束を強める強め界磁制御と共に矩形波制御を実行する状態へ移行する際に、電動機のコイルに流れる電流のオーバーシュートや電動機が発生させるトルクの振動を抑制することができる電動機駆動装置の制御装置を実現する。
【解決手段】通常界磁制御と共にパルス幅変調制御を実行する通常界磁・パルス幅変調制御モードA1から、強め界磁制御と共に矩形波制御を実行する強め界磁・矩形波制御モードA3へ移行する間に、強め界磁制御と共にパルス幅変調制御を実行する強め界磁・パルス幅変調制御モードA2を経る強め界磁移行制御を実行するモード制御部を備える。
(もっと読む)
一体形調節器を有する電気モータの駆動インバータ
本発明は、駆動インバータに関し、この駆動インバータは、電気モータ(6)の相に結合されるべき端子盤(4)に電流を供給する交流電流発生器(3)と、電力ライン(20)と、電気モータに電力供給する相のうちの幾つかに設けられた交流電流センサ(41,42)と、電力ラインに設けられた電流センサ(21)と、電流源からの限界電流の少なくとも1つの値及び所要のトルク指針を含む情報を受け取る入力(52)と、トルク指針に基づいて電気モータの相電流を駆動する一方で、電流源からの限界電流に基づいて電力ラインの電流を許容値に維持するコントローラと、を有する。したがって、電流源を損傷させる恐れなく、最大電流を常時、電流源に課すことができる。 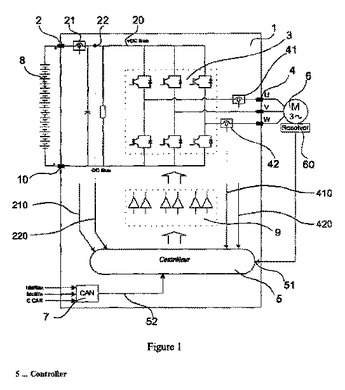 (もっと読む)
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサの故障時に、回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部40は、レゾルバ8の出力信号の異常を検出すると、第2モードから、第1モードに、モータ制御モードを切り換える。制御モードが第1モードに切り換えられると、レゾルバ8の故障直前のq軸指示電流Iq*が負の値であるか否かが判別される。レゾルバ故障前のq軸指示電流Iq*が零または正の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEが、制御角θCの前回値θC(n-1)の切換初期値として設定される。一方、レゾルバ故障前のq軸指示電流Iq*が負の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEを、180°ずらした値(θE+π)が、制御角θCの前回値θC(n-1)の切換初期値として設定される。
(もっと読む)
回転角検出装置の製造方法、回転角検出装置、モータ制御装置及び電動パワーステアリング装置
【課題】製造工程の煩雑化を招くことなく、全域に亘ってより高精度にモータの回転角を検出することができる回転角検出装置の製造方法を提供すること。
【解決手段】無負荷状態で回転するモータに生じた三相の誘起電圧値を座標変換することにより検出されるd軸電圧値及びq軸電圧値に基づいて、モータレゾルバにより検出される回転角θの全域に亘って設定された複数の検出点(θ1〜θn)におけるオフセット値(φ:α1〜αn)を演算する。そして、その各オフセット値を各検出点における補正値Δθとすることにより回転角θの全域に亘る補正データ35を生成し、メモリ33(の不揮発性記憶領域34)に記憶(書込)する。
(もっと読む)
電動機駆動装置の制御装置
【課題】電圧制御部による内部処理に関する演算周期が最適化され、交流電動機を制御する際の処理負荷の低減が図られた制御装置を提供する。
【解決手段】直流電圧を交流電圧に変換して交流電動機に供給する直流交流変換部を備えた電動機駆動装置を、ベクトル制御法により制御する制御装置。交流電動機を駆動するための電圧指令値から直流交流変換部を制御するための制御信号を生成する電圧制御部として、電圧指令値と直流交流変換部に供給される実際の直流電圧とに基づいて、変調率と電圧指令位相とを導出する第一電圧制御部と、変調率と電圧指令位相と磁極位置とに基づいて、制御信号を生成する第二電圧制御部と、を備え、第一電圧制御部の演算周期(第二演算周期T2)が、第二電圧制御部の演算周期(第一演算周期T1)よりも長く設定されている。
(もっと読む)
交流電動機の制御装置
【課題】同期PWMおよび非同期PWMを選択的に適用するPWM制御において、両者の選択条件を適切に設定することによって、円滑な交流電動機制御を実現する。
【解決手段】制御装置は、相電圧指令と搬送波との電圧比較結果に基づいてインバータから交流電動機に印加されるパルス幅変調電圧を制御することによって、交流電動機の出力を制御する。制御装置は、交流電動機の回転速度が変動している場合(S210にてYES)、搬送波が極大となる時の相電圧指令の実位相Pと目標位相Ptgtとの位相差ΔPを算出する(S220〜S250)。制御装置は、位相差ΔPの絶対値がしきい値よりも小さい場合(S260にてYES)、同期PWMを選択し(S270)、位相差ΔPの絶対値がしきい値よりも大きい場合(S260にてNO)、非同期PWMを選択する(S280)。
(もっと読む)
121 - 140 / 339
[ Back to top ]