
Fターム[5H505LL58]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | レゾルバ (339)
Fターム[5H505LL58]に分類される特許
41 - 60 / 339
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
車両用操舵装置

【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
モータ制御装置
【課題】演算時間の遅れを補償した非干渉化制御を行うことによって、モータの応答性および追従性を効果的に向上する。
【解決手段】モータ制御装置は、PI演算値Vdo,Vqoを演算するPI演算部51a,52aと、非干渉化制御量Dd,Dqを演算する非干渉化制御量演算部51b,52bと、PI演算値Vdo,Vqoと非干渉化制御量Dd,Dqとを加算する加算部51c,52cと、補正値Cd,Cqを演算する補正値演算部51e,52eと、加算部51c,52cの加算結果から補正値Cd,Cqを減算して電圧指令値Vd*,Vq*を出力する減算部51d′,52d′とを含む。補正値演算部51e,52eは、前演算周期における電圧指令値Vd*,Vq*と、今演算周期において検出された軸電流Id,Iqと、モータおよび駆動回路を含む電気回路の電気抵抗Rとを用いて、補正値Cd,Cqを演算する。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)、車載の電流センサによる電流Ibの計測値の2乗値を予めオフラインで検出した電流Ibの真値の2乗値に換算し(S12)、電流Ibの真値の2乗値が許容値以上である場合(S13にてYES)、矩形制御の実行を禁止する(S14)。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
回転機の制御装置
【課題】トルク式「φ・id+P(Ld−Lq)・id・iq」や、電機子鎖交磁束定数φとして特定の値を想定したマップに基づきトルクを推定すると、モータジェネレータの永久磁石の磁力が減少する異常が生じる場合等にあっては、電機子鎖交磁束定数φが変化するため、トルクの推定精度が大きく低下する。
【解決手段】診断用トルク推定部56では、実効電力EP(=Vn・Ia・cosΔ)を電気角速度ωで除算することで診断用推定トルクTdeを算出する。ここで、ノルムVnは、インバータの出力電圧のベクトルのノルムであり、ノルムIaは、実電流id,iqのベクトルノルムであり、位相差Δは、電流ベクトルと電圧ベクトルとの位相差である。FB演算系異常診断部60では、上記式に準じた手法にて推定される制御用推定トルクTeと診断用推定トルクTdeとを比較することで、演算系の異常の有無を診断する。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)で、かつ電流Ibの2乗値が許容値以上である場合(S12にてYES)、インバータの矩形制御の実行を禁止する(S13)。一方、上アームオン制御中でない場合(S10にてNO)、モータ回転速度Nが共振回転速度領域に含まれない場合(S11にてNO)、電流Ibの2乗値が許容値未満である場合(S12にてNO)の少なくともいずれかの場合、制御装置は、矩形制御の実行を許容する(S14)。
(もっと読む)
回転機の制御装置
【課題】トルク式「φ・id+P(Ld−Lq)・id・iq」や、電機子鎖交磁束定数φとして特定の値を想定したマップに基づきトルクを推定すると、モータジェネレータ10の永久磁石の磁力が減少する異常が生じる場合等にあっては、電機子鎖交磁束定数φが変化するため、トルクの推定精度が大きく低下する。
【解決手段】MGECU30では、実効電力EP(=Vn・Ia・cosΔ)を電気角速度ωで除算することで診断用推定トルクTdeを算出する。ここで、ノルムVnは、インバータINVの出力電圧のベクトルのノルムであり、ノルムIaは、実電流id,iqのベクトルノルムであり、位相差Δは、電流ベクトルと電圧ベクトルとの位相差である。診断用推定トルクTdeがトルク指令値Trから大きく乖離するか否かに基づき、トルクの異常の有無を診断する。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
回転電機
【課題】始動、アシスト等の駆動時におけるスイッチング素子の発熱は、通電による発熱と電流遮断時に発生するスイッチングオフ時の損失による発熱があり、始動や駆動時では発熱量が大きくなり、スイッチング素子の温度が大幅に上昇してしまう。これを避け、回転電機の過熱保護を図る。
【解決手段】パワー回路用半導体スイッチング素子のアバランシェ降伏を用いてスイッチングオフ時の電圧上昇を緩和するとともに、スイッチングオフ時に前記スイッチング素子に流れている電流が略最小となるように、前記マップ記憶手段425に記憶されているマップから前記各検出手段422、423により検出したB端子電圧、回転速度ごとに演算手段426を用いて界磁電流、位相ずらし量を変更するようにした。
(もっと読む)
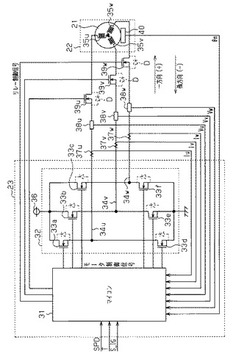
モータ制御装置
【課題】試験体を回転させるモータの回転数の制御の精度を向上させることが可能なモータ制御装置を提供する。
【解決手段】レゾルバ34及びエンコーダ35は、モータ33の回転数を検出する。トルクメータ36は、モータ33のトルクを検出する。フィードバック制御部23は、目標の回転数と目標のトルクとを示すパラメータマップに従って、目標の回転数でモータ33が回転するように、又は、目標のトルクをモータ33が出力するように、レゾルバ34によって検出された回転数、及びトルクメータ36によって検出されたトルクに基づいて、モータ33の動作をフィードバック制御し、トルクの変動幅が閾値以上となる場合、レゾルバ34によって検出された回転数とエンコーダ35によって検出された回転数とから求められる回転数に基づいて、モータ33の動作をフィードバック制御する。
(もっと読む)
モータ駆動装置
【課題】 インバータおよびモータリレーを半導体スイッチング素子で構成するモータ駆動装置の体格を小型にする。
【解決手段】 三相交流モータを駆動するECU(モータ駆動装置)において、ヒートシンク201の第1搭載部24は端部22に沿って形成される。第2搭載部25は第1搭載部24と直交する方向に形成され、第1列251と第2列252とから構成される。3個のモータリレー用MOS45は第1搭載部24に搭載され、6個のインバータ用MOS44および2個の電源リレー用MOS43は第2搭載部25に搭載される。MOS43、44、45のリード部46は制御及びパワー基板30に電気的に接続される。また、MOS43、44、45の熱は、絶縁放熱シート47を介してヒートシンク201に放熱される。このようにMOS43、44、45を配置することにより、ECUの体格を小型にすることができる。
(もっと読む)
制御装置
【課題】重畳するサージ電圧の大きさを抑制することである。
【解決手段】モータジェネレータ50と電力供給線を介して接続されるインバータ回路20に含まれるスイッチング素子をPWM制御方式によりスイッチング制御する制御装置70であって、スイッチング素子のスイッチング間隔が三相回転電機の巻線間に発生するサージ電圧の変動周期の1/2を中心とする所定の範囲内にあるときに、スイッチング間隔が所定の範囲外となるように所定のパラメータを変更する変更部を有する。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータ電圧指令値とPI制御部によって演算されたPI演算値とから電圧指令値ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された電圧指令値ゲインまたはdq軸ゲインマップから求めた電流制限ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
アクチュエータ、モータ制御システム及びモータ制御方法
【課題】センサ総数を低減し、信頼性を向上したアクチュエータ、モータ制御システム及びモータ制御方法を提供する。
【解決手段】アクチュエータは、アクチュエータは、モータと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の位置を規制する位置規制機構と、被駆動機構の変位を検出する位置センサと、位置規制機構により被駆動機構の位置が規制された状態での位置センサの出力変動を温度情報へ変換する制御装置と、を含む。
(もっと読む)
モータ制御装置
【課題】モータ制御が停止している期間においても、モータ回転角度に対して信頼性を確保しながら、モータ回転角度の演算を低消費電流で継続する。
【解決手段】主演算手段101は、ブラシレスモータ5を制御する第1の動作状態と、モータ制御を停止する第2の動作状態をとる。副演算手段102は、第1の状態において、第1監視手段106で主演算手段101を監視し、第2の状態においてモータ回転角度の演算をする。これにより、モータ制御停止時においてもモータ回転角度の演算が継続できる。また、副演算手段102は、第2監視手段201で監視し、信頼性を確保する。さらに、第2の動作状態において、第1の動作状態の第1演算周期より長い第2演算周期にてモータ回転角度の演算を行うことで、消費電流が低減可能となる。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機がロック状態とロック解除状態を繰り返すときに、駆動回路を構成するスイッチング素子についての電流集中の緩和を効果的に行うことである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20に接続されるインバータ回路30と、車両に対するトルク要求等に応じてインバータ回路30を駆動する駆動指令部40と、これらの要素の動作を全体として制御する制御装置50を含んで構成される。制御装置50は、ロック時制御のために、ロック判定部52と、素子温度取得部54と、トルク制限部56とを含んで構成される。そして、トルク制限部56は、回転電機20のスイッチング素子の素子温度に応じてトルク指令値T*48の低減レートを設定してトルク指令値T*48を低減させる処理を行う。
(もっと読む)
41 - 60 / 339
[ Back to top ]