
Fターム[5H505LL58]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | レゾルバ (339)
Fターム[5H505LL58]に分類される特許
21 - 40 / 339
電動パワーステアリング装置
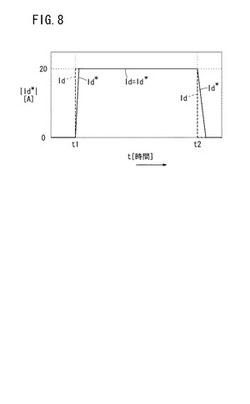
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
モータ制御システム

【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
車両走行制御システム
【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、回転電機14の動作点がほとんど移動せずに滞留している場合にその滞留時間が予め定めた滞留閾値時間以上であるかどうかを判断する滞留時間判定部44と、滞留時間が滞留閾値時間以上のときは、降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
車両用モータ温度検出装置
【課題】モータのコイルに冷媒が供給された後であっても、コイルの温度をより正確に推定することが可能な車両用モータ温度検出装置を提供する。
【解決手段】温度センサ20は、モータ16のステータコアに設けられている。冷却システム22は、モータ16のコイルに冷媒を供給してコイルを冷却する。温度推定部32は、温度センサによって検出された温度(測定値Ta)に基づいてモータ16のコイルの温度を推定する。温度推定部32は、冷却システム22によってモータ16のコイルに冷媒が供給された始めてから所定時間が経過するまでの第1の期間においては、予め設定された値に基づいてモータ16のコイルの温度を推定し、第1の期間以外の第2の期間においては、温度センサ20によって検出された温度に基づいてモータ16のコイルの温度を推定する。
(もっと読む)
車両走行制御システム
【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、動作点が昇圧切替線側から降圧切替線に近づいて予め定めた降圧機会増加線の領域にあるかどうかを判断する降圧機会増加領域判定部44と、降圧機会増加領域にあるときに、車両走行状態を変更することで電圧変換器24の動作点を移動させて降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
永久磁石モータの制御装置
【課題】電力変換装置において、スイッチング損失の低減を図るとともにモータ損失の低減も図る。
【解決手段】直流電力から変換される交流磁束リプルとモータの磁極位置信号に基づいて、スイッチング素子のスイッチング動作を制御するために、駆動回路から駆動信号をスイッチング素子に供給し、上記スイッチング素子が、モータの磁極位置に対応付けられて導通あるいは遮断動作を行う。このような構成および作用により、上記スイッチング素子のスイッチング動作の単位時間当たりの回数あるいは交流電力の1サイクル当たりのスイッチング回数を、一般のPWM方式に比べ低減できる。また上記構成においては、パワースイッチング回路のスイッチング素子のスイッチング頻度を低減しているにもかかわらず、モータの損失を抑制でき、スイッチング動作に伴うインバータ損失も低減できる効果がある。
(もっと読む)
インバータ制御装置
【課題】コアレス電流センサを用いた際の検出精度の悪化の影響を無くしてモータを正常に駆動させることが可能なインバータ制御装置を提供する。
【解決手段】コアレス電流センサ40が備えるシールド板により生じる残留磁束の影響により出力電圧Vuv、Vvwに含まれる位相遅れ及びゲイン誤差が無くなるように、出力電圧Vuv、Vvwを補正し、その補正された補正出力電圧Vuv、Vvwと、外部から入力される指令値とに基づいて、モータインバータ41を制御する。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
電気自動車
【課題】インバータが備えるスイッチング素子の温度を推定することのできる電気自動車を提供する。
【解決手段】電気自動車100は、インバータ21と、パワーコントローラ25を備える。インバータ21は、トランジスタTrとダイオードDdが並列に接続されたスイッチング素子sw群で構成される。電気自動車100はさらに、スイッチング素子swを冷却する冷媒の温度を計測する温度センサQwtと、インバータ21が出力する3相交流UVWの各相を流れる電流を計測する電流センサ6、8と、インバータ21への入力電圧VHを計測する電圧センサVdHを備える。パワーコントローラ25(温度推定器)は、電流センサと電圧センサの計測データ及びスイッチング素子のデューティ比に基づいて温度補正値を算出し、その温度補正値を冷媒温度に加算した値をスイッチング素子の推定温度とする。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
電気自動車
【課題】トルク重視の走行モードと経済性重視の走行モードを切り換えることのできる電気自動車を提供する。
【解決手段】モータを制御するコントローラは、モータのトルク指令に相当する電流指令値をdq座標系におけるd軸成分Idとq軸成分Iqに分解し、それら成分IdとIqを3相UVWの指令値に変換してインバータへ出力する。コントローラは、電流指令値に対して最大トルクを出力するIdとIqの組を与えるトルク優先マップと、電流指令値に対してモータ損失が最小となるIdとIqの組を与える効率優先マップを切り換えて用いることができる。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
モータ駆動制御システム
【課題】モータ駆動制御システムにおいて、交流電動機の駆動制御に支障を来たすことなく、交流電動機に流れる電流を検出する電流センサの故障診断を高い信頼性をもって行なうことを可能とする。
【解決手段】相電流演算部320は、電流センサ180による母線電流Idcの検出値と、インバータ140のスイッチング素子Q3〜Q8のオン・オフの組合せを示すスイッチングパターンとに基づいて、交流電動機200の相電流を推定する。相電流比較部330は、相電流演算部320による相電流の推定値と、電流センサ240による相電流の検出値との比較結果に基づいて、電流センサ240の故障を診断する。制御部340は、交流電動機200の駆動に基づく暗騒音が発生しているときに電流センサ240の故障診断の実行期間を設けるとともに、故障診断の実行期間中は、制御指令演算部310で用いる搬送波の周波数を一時的に低下させる。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】簡易な制御によって、高トルク領域からトルクを減少させる際のトルク追従性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域においてトルクを減少する場合には、電圧位相の上限ガード値を通常時からトルク減少方向に変化させる。これにより、電圧位相の変化量が強制的に確保される。
(もっと読む)
21 - 40 / 339
[ Back to top ]