
Fターム[5H540EE06]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 速度をフィードバックするもの (56)
Fターム[5H540EE06]に分類される特許
1 - 20 / 56
球面モータの制御装置および球面モータの制御方法
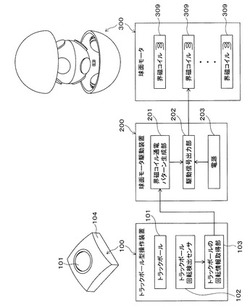
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
リニアモータ制御装置

【課題】電力変換器の切替え時の出力電圧振幅制限に伴う推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、電力変換器を切替える際、電力変換器の出力電圧制限または出力電流応答遅れを防止するように構成した。
(もっと読む)
リニアアクチュエータの駆動方法
【課題】異常を早期に検出することのできるリニアアクチュエータの駆動方法を提供する。
【解決手段】振幅制御部40は、固定子11に対して往復動される可動子12の振幅を検出し、その検出した振幅の時間的変化に応じて負荷の経時的な変動を検出し、その変動から異常を検出する。また、振幅制御部40は、検出した振幅を制御出力部50に出力する。この制御出力部50は、制御出力部50からの振幅情報に基づいて、可動子12を往復動させるための駆動電流Idを制御する。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
リニアモータの制御装置、及びリニアモータ装置
【課題】リニアスケールを用いずにリニアモータの位置決め精度を改善することができるリニアモータの制御装置を提供する。
【解決手段】リニアモータの制御装置は、リニアモータの電機子が有している磁気センサであってリニアモータの駆動用磁石より生じる磁界の方向に応じた信号を出力する磁気センサから出力される信号の変化に基づいてリニアモータの可動子の位置を検出する位置検出部と、位置検出部が検出した可動子の位置と外部より入力される位置指令値とに基づいて速度指令値を算出する位置制御部と、リニアモータに備えられている複数のコイルに流れる電流値から可動子が移動する速度を推定する推定部と、位置制御部が算出する速度指令値と推定部により推定する可動子の推定移動速度とに基づいて電流指令値を算出する速度制御部と、速度制御部が算出した電流指令値に応じて複数のコイルに電力を供給する電力変換器とを備えている。
(もっと読む)
検知方法、露光方法、及びデバイス製造方法
【課題】固定子と可動子との間の距離の変化を検知可能な検知方法、この検知方法による検知結果に基づいて基板にパターンを転写露光する露光方法、及びこの露光方法を利用してデバイスを製造するデバイス製造方法を提供すること。
【解決手段】検知方法は、第1方向に沿って配列された複数の固定子に対して可動子を第1方向に沿って第1の速度で等速移動させ、等速移動させたときの可動子の第1方向における第1の推力の大きさを検出し、複数の固定子に対して可動子を第1方向に沿って第1の速度とは異なる第2の速度で等速移動させ、等速移動させたときの可動子の第1方向における第2の推力の大きさを検出し、第1及び第2の速度と、第1及び第2の推力の大きさとを用いて、固定子と可動子との間に作用するコギング力の大きさを算出し、算出ステップによって算出されたコギング力の大きさに基づいて、固定子と可動子との間の距離の変化を検知する。
(もっと読む)
リニアモータの制御装置
【課題】磁気センサが出力する信号に周期的な変動成分が含まれる場合においても、リニアモータを安定して制御する。
【解決手段】リニアモータを制御する制御装置は、外部より入力された単位時間当たりに可動子を移動させる距離を示す位置指令に基づいて、可動子を等速にて移動させる等速制御と、可動子の速度を加速させる加速度制御とのいずれか一方を選択し、等速制御を選択した場合、可動子の速度に対する平均である平均速度と、速度指令とに基づいて、リニアモータに印加する電流値を示す電流指令を算出し、加速度制御を選択した場合、可動子の速度と、速度指令とに基づいて、電流指令を算出し、算出した電流指令に基づいてリニアモータに電流を印加する。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータがどのような状態であっても、その固有振動数にできるだけ近い周波数で駆動する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。誘起電圧検出部30は、非通電期間において、コイルL1に発生する誘起電圧を検出する。ゼロクロス検出部40は、誘起電圧検出部30により検出された誘起電圧のゼロクロスを検出する。駆動信号生成部10は、ゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。
(もっと読む)
電動機の制御装置および制御方法
【課題】1台の電圧形インバータで誘導電動機と同期電動機の双方を所望の速度に制御する。
【解決手段】誘導電動機速度制御器12は、誘導電動機1の回転速度指令値ωIM*と、誘導電動機1の回転速度ωIMとの偏差から比例積分制御等により磁極方向電流指令値Id*を演算する。同期電動機速度制御器13は、同期電動機2の回転速度指令値ωSM*と、同期電動機2の回転速度ωSMとの偏差から比例積分制御等により磁極直交方向電流指令値Iq*を演算する。dq軸電流制御器14は、磁極方向電流指令値Id*と磁極方向電流値Idとの偏差、および、磁極直交方向電流指令値Iq*と磁極直交方向電流値Iqとの偏差から、比例積分制御等により磁極方向電圧指令値Vd*および磁極直交方向電圧指令値Vq*を演算する。
(もっと読む)
モータドライブ制御装置、モータドライブ制御方法
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
リニアモータ制御装置
【課題】各固定子巻線における相間電圧の不平衡を正確に推定し、固定子巻線の温度変化に伴うリニアモータのモデル化誤差やセンサ測定誤差の影響を抑制し、相間電圧の不平衡に起因する推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、界磁可動子が移動する際、全ての固定子巻線の相間電圧が平衡するように構成した。
(もっと読む)
制御装置
【課題】リニアアクチュエータを高速駆動可能な制御装置を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、複数の永久磁石5を備えた界磁保持部材4と、界磁に対向するように配置されるコイル7を保持するコイル保持部材3とを備えて、界磁保持部材4とコイル保持部材3を相対変位させる推力を発生するリニアアクチュエータ2をベクトル制御する制御装置1において、界磁保持部材4とコイル保持部材3の相対速度に基づいてq軸電流指令値Iq*とd軸電流指令値Id*を求めてコイル7に流れる電流を制御する制御手段を備え、界磁保持部材4とコイル保持部材3の相対速度が上限閾値αから下限閾値βの間の範囲外となるとd軸電流指令値Id*を負の値とすることを特徴とする。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
モータ制御方法、および、モータ駆動装置の電源装置
【課題】高速応答性を備えかつ加速性を向上させるモータ制御方法を提供する。
【解決手段】モータを駆動するモータ駆動手段に電力を供給する電源を用意し、モータの加速または減速の開始に基づき、電源からの供給電力の電圧を上げ(S1、S2)、モータの加速または減速の終了に基づき、供給電力の電圧を下げる(S3、S4)。
(もっと読む)
リニアモータの推力リップル補償装置およびその補償方法
【課題】 リニアモータの推力リップルが多周期成分を含んでも、制御ゲインが低くても、高精度に推力リップルを補償し、モータの送りむらを減少させるリニアモータの推力リップル補償装置を提供する。
【解決手段】 リニアモータの推力リップル補償装置において、推力リップル補償部20は、可動子位置を入力しフーリエ基本波の位相を出力する位相計算器25と、可動子位置に基づいてフーリエ変換機能信号と係数更新機能信号を出力する操作器24と、フーリエ変換機能信号が有効となった際にフーリエ基本位相および補償推力指令に基づいてフーリエ変換を行い第1フーリエ係数を算出するフーリエ変換器23と、係数更新機能信号が有効となった際に第1フーリエ係数を入力してデータ更新し第2フーリエ係数を出力するバッファ22と、第2フーリエ係数を用いてフーリエ基本位相に基づいて逆フーリエ変換を行いリップル補償値を算出する逆フーリエ変換器21とで構成した。
(もっと読む)
移動装置
【課題】非常時であっても確実に可動部を停止させることができるとともに装置に損傷を与えること防止する移動装置を提供する。
【解決手段】搬送装置10は、可動部としてのリニアステージ12を移動させるリニア搬送部11と、電力の供給を受けてリニア搬送部11を駆動する駆動手段としてのサーボドライバ13と、サーボドライバ13に電力を供給する電力供給手段としての電力装置14と、強制停止指示が入力される強制停止入力部16と、前記強制停止指示の入力に応じてサーボドライバ13の駆動状態を制御し、リニアステージ12を停止させる制御コンピュータ19と、前記強制停止指示の入力に応じて、前記入力から所定時間の経過後に、サーボドライバ13への電力の供給を停止する電力遮断部32とを備えたことを特徴とする。
(もっと読む)
モータ制御装置とそのトルクリップル補正方法及びモータ制御システム
【課題】複数の周波数成分を含む高調波トルクリップルの補正が可能であり、また、トルク指令からコギング等のトルクリップルを正確に求めることができるモータ制御装置及びそのトルクリップル補正方法を提供する。
【解決手段】 設定したサンプリング条件に従って、サンプリング部10へサンプリング実行指令を出力するサンプリング判定部9と、複数箇所でのモータ位置Pmでサンプリングした補正後トルク指令Tr*を使って求めた複数のフーリエ係数an,bnから、平均化処理した平均値フーリエ係数an*,bn*を算出する平均化処理部13とを備え、補正値演算部12は、設定した繰り返し回数Kだけ更新するフーリエ係数an,bnまたは平均値フーリエ係数an*,bn*を使ってトルクリップル補正値Thを算出する。
(もっと読む)
モータの制御装置及び制御方法
【課題】電磁接触器等が作動してモータへの電力供給が遮断されたような場合でも、ベクトル制御を利用することにより、電源遮断時の惰性による移動距離を可及的に減少させ得るモータの制御装置及び制御方法を提供する。
【解決手段】目標とするモータの動作に対応して設定されるd軸電流指令とq軸電流指令に従ってインバータからモータに供給されるモータ電流のd軸成分であるd軸電流とq軸成分であるq軸電流を制御する制御部182,183とを備えたモータ制御装置において、交流電源110からコンバータ130への電力供給が遮断されると、平滑コンデンサ122に蓄えられていた電気エネルギーをインバータ140に供給すると共に、d軸電流を制御する制御部182,183に対して所定の大きさの緊急停止用のd軸電流指令を出し、リニアモータ1にd軸電流を印加して緊急停止させることを特徴とする。
(もっと読む)
1 - 20 / 56
[ Back to top ]