
Fターム[5H560BB07]の内容
無整流子電動機の制御 (40,007) | 電動機の構造 (6,076) | 電機子巻線 (3,737) | Y結線 (689)
Fターム[5H560BB07]に分類される特許
1 - 20 / 689
電動工具
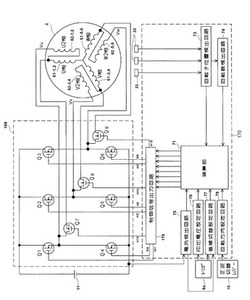
【課題】巻線仕様を変更して2種類以上のモータ特性を得るモータを備える場合に、各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行うことで、切替えた瞬間に生じる急激なトルク変化や回転数変化を回避する。
【解決手段】永久磁石回転子と、固定子4と、固定子の各ティース毎に2つのコイルを持つ巻線を有するモータと、これによって駆動される先端工具と、前記巻線へ駆動電力を供給するインバータ回路169と、これを制御する制御部170と、前記モータの起動及び回転の制御を行うためのスイッチとを備え、前記巻線は前記ティース毎に2つのコイルを有することで、2種の巻線仕様を有するものであり、制御部170は、前記モータに流れる電流に応じて2つのコイルへの通電を変化させることにより各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行う。
(もっと読む)
車両用操舵装置

【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用ブラシレスモータの駆動装置
【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】複数相のコイルを有するモータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、センサ信号を所定の複数のしきい値レベルと比較して位相を検出し、当該検出した位相を示す位相情報信号を出力し、検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号又はそれに対応する複数の信号の中から一つを選択し、分割された複数の位相区間において選択されたセンサ信号又はそれに対応する信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、当該検出した位相を示す位相情報信号を出力する。
(もっと読む)
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
ブラシレス発電電動機の制御装置
【課題】スイッチング回数を減らしても電圧昇圧機能を実現しつつ良好な回転数特性が得られ、冷却簡素で、ノイズ対策も簡素な電源電圧昇圧機能併用の電動機駆動方法の提供。
【解決手段】前記星型多相巻線の中性点と前記多相インバータの直流負極間に直流電源を接続し、前記インバータのスイッチ素子を、いわゆる矩形波導通で駆動する際に、前記インバータのハイサイドスイッチがオフの期間に、該ハイサイドスイッチに直列に接続されたローサイドのスイッチをPWMスイッチング制御するものにおいて、前記ハイサイドスイッチがオフになった時点を基点として、ローサイドスイッチのスイッチング開始時点をα、スイッチング終了時点をβと定義すると、β―α≧120度(電気角度)、α>0度、β<180度であることを特徴とする発電電動機の制御装置、及びシステム。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
モータ制御装置
【課題】3相分のモータコイルの誘起電圧の検出信号を絶縁して制御部に出力する際に、絶縁素子(フォトカプラ)の個数を3個から1個に減らす。
【解決手段】本発明のモータ制御装置10では、3相ブラシレスモータ1を惰性で回転させるフリーラン状態とし、高電圧系の回路(電圧比較回路21と波形合成回路22等)において、U、V、W相のモータコイルに発生する誘起電圧を各相ごとにそれぞれ検出(例えば、ゼロクロス点の発生タイミングを検出)し、この3相分の検出信号を低電圧系の制御回路(制御部30)に出力する際に、高電圧系の回路において、上記3相分の検出信号を基に、各相の検出信号に含まれるそれぞれの検出情報(例えば、ゼロクロス点の発生タイミングの情報)を含む1つの信号を合成し、この合成された信号を1つの絶縁素子(フォトカプラPC1)を介して、低電圧系の制御回路(制御部30)に出力する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ駆動装置
【課題】3相DCブラシレスモータ駆動装置において、1個のホール素子によるロータ位置検出でも、安定したモータ駆動を実現できる3相DCブラシレスモータ駆動装置を提供すること。
【解決手段】ロータ位置検出手段として1個のホール素子10を備え、前記ホール素子10からのロータ位置検出信号に基づき励磁コイルの励磁パターンを決定する機能を有したモータ駆動装置において、ロータ位置検出信号から算出されるモータ回転数と目標モータ回転数との乖離量が設定値以下である場合には、前記ロータ位置検出信号の立上りエッジ14もしくは立下りエッジ15の片エッジのみを用いて励磁パターンを決定し、前記乖離量が設定値より大きい場合には、前記ロータ位置検出信号の立上りエッジ14および立下りエッジ15の両エッジを用いて励磁パターンを決定する構成とする。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
駆動制御装置、及び、駆動制御方法
【課題】電圧制御方式の切り替え時における電動機の制御性を改善した駆動制御装置、及び、駆動制御方法を提供する。
【解決手段】駆動制御装置は、電動機の駆動制御に用いる第1電圧指令を第1方式で生成する第1領域と、前記駆動制御に用いる第2電圧指令を第2方式で生成する第2領域との境界を前記電動機の回転数とトルク指令値とで表すマップを格納する格納部37と、前記回転数と前記トルク指令値とで決まる前記電動機の動作点が前記境界を含む所定の切替領域内にある場合は、前記第1方式で第1電圧指令を生成するとともに、前記第2方式で第2電圧指令を生成する電圧指令生成部と、前記第2方式から前記第1方式への切り替えが必要な場合は前記第1電圧指令を用いて前記電動機の駆動制御を行い、前記第1方式から前記第2方式への切り替えが必要な場合は前記第2電圧指令を用いて前記電動機の駆動制御を行う駆動制御部30とを含む。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
1 - 20 / 689
[ Back to top ]