
Fターム[5H560DA02]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 磁気的手段(エンコーダは除く) (911) | ホール素子 (707)
Fターム[5H560DA02]の下位に属するFターム
ホールIC (156)
Fターム[5H560DA02]に分類される特許
1 - 20 / 551
画像形成装置
半導体装置
ブラシレスモータの制御方法
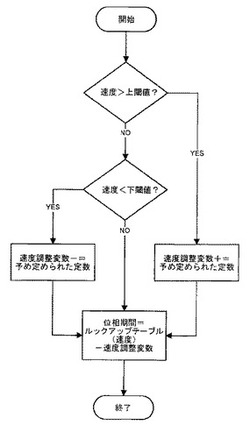
【課題】モータの公差及びモータが作動するときの負荷の公差に関わらずモータの速度を制御可能な、ブラシレスモータの制御方法を提供する。
【解決手段】本発明によるブラシレスモータを制御する方法は、複数の速度の各々の制御値を含むルックアップテーブルを記憶し、速度調整制御値を定期的に得、モータの相巻線を励起させる。速度調整制御値は、励起の位相及び長さの一方を定める。速度調整制御値を得るのに、モータの速度を測定し、測定された速度が閾値よりも大きいとき又は小さいとき、速度調整変数を定数だけ増大させ又は減少させ、測定された速度を用いて、制御値をルックアップテーブルから選択し、速度調整変数を用いて、選択された制御値を調整して、速度調整制御値を得る。本発明は、上記方法を実行する制御システム、及び、ブラシレスモータ及び制御システムを有するモータ組立体にも関する。
(もっと読む)
検出装置、駆動装置

【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】複数相のコイルを有するモータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、センサ信号を所定の複数のしきい値レベルと比較して位相を検出し、当該検出した位相を示す位相情報信号を出力し、検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号又はそれに対応する複数の信号の中から一つを選択し、分割された複数の位相区間において選択されたセンサ信号又はそれに対応する信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、当該検出した位相を示す位相情報信号を出力する。
(もっと読む)
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動装置
【課題】本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
モータ駆動装置およびモータおよびそれを搭載した空気調整機
【課題】モータ運転停止時は、制御電源からモータ駆動装置への電力供給量を低減して待機時の消費電力を抑える。
【解決手段】主電源からモータの複数相の駆動巻線へ電力供給するインバータ部と、制御電源を電力源とし、外部との信号入出力端子の一つとして前記駆動巻線への電力供給値を意味する制御信号入力端子を備え、前記インバータ部へPWM信号を前記制御信号に基づいて発生する制御部を備えたモータ駆動装置であって、
前記制御部は、前記制御信号が前記駆動巻線への電力供給値ゼロを意味している場合には、前記PWM信号発生に関る内部構成部分を機能停止するよう作用して内部消費電力を低減し、前記制御電源から制御部への電力供給量を前記内部構成部分機能動作中に比べ小さくする構成とした。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
ブラシレスモータを始動させる方法
【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
モータ制御装置
【課題】3相分のモータコイルの誘起電圧の検出信号を絶縁して制御部に出力する際に、絶縁素子(フォトカプラ)の個数を3個から1個に減らす。
【解決手段】本発明のモータ制御装置10では、3相ブラシレスモータ1を惰性で回転させるフリーラン状態とし、高電圧系の回路(電圧比較回路21と波形合成回路22等)において、U、V、W相のモータコイルに発生する誘起電圧を各相ごとにそれぞれ検出(例えば、ゼロクロス点の発生タイミングを検出)し、この3相分の検出信号を低電圧系の制御回路(制御部30)に出力する際に、高電圧系の回路において、上記3相分の検出信号を基に、各相の検出信号に含まれるそれぞれの検出情報(例えば、ゼロクロス点の発生タイミングの情報)を含む1つの信号を合成し、この合成された信号を1つの絶縁素子(フォトカプラPC1)を介して、低電圧系の制御回路(制御部30)に出力する。
(もっと読む)
モータ駆動装置
【課題】3相DCブラシレスモータ駆動装置において、1個のホール素子によるロータ位置検出でも、安定したモータ駆動を実現できる3相DCブラシレスモータ駆動装置を提供すること。
【解決手段】ロータ位置検出手段として1個のホール素子10を備え、前記ホール素子10からのロータ位置検出信号に基づき励磁コイルの励磁パターンを決定する機能を有したモータ駆動装置において、ロータ位置検出信号から算出されるモータ回転数と目標モータ回転数との乖離量が設定値以下である場合には、前記ロータ位置検出信号の立上りエッジ14もしくは立下りエッジ15の片エッジのみを用いて励磁パターンを決定し、前記乖離量が設定値より大きい場合には、前記ロータ位置検出信号の立上りエッジ14および立下りエッジ15の両エッジを用いて励磁パターンを決定する構成とする。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
モータ制御回路及びモータ制御システム
【課題】モータをスムーズに回転させることができるモータ制御回路を提供する。
【解決手段】一実施形態によれば、モータ制御回路は、回転位置デコード部と、回転位置判定部と、モータ駆動信号生成部と、を備える。前記モータ制御回路は、センサで検出されたモータの回転位置に応じて当該モータを制御する。前記回転位置デコード部は、前記センサから供給されたセンサ信号に応じて、前記モータの回転位置を表す回転位置信号を生成する。前記回転位置判定部は、前記回転位置信号に基づいて前記モータの現在の回転位置を記憶して、前記回転位置信号が、記憶された当該現在の回転位置の次の回転位置を表した時に、記憶された当該現在の回転位置を当該次の回転位置に更新すると共に、当該次の回転位置を表すモータ制御信号を生成する。前記モータ駆動信号生成部は、前記モータ制御信号に応じて、前記モータを駆動するモータ駆動信号を生成する。
(もっと読む)
PWM信号出力回路
【課題】モータ駆動回路にソフトスイッチングを実行させつつモータを安定に回転させることができるPWM信号出力回路を提供する。
【解決手段】PWM信号に基づいてモータを駆動する駆動回路に対し、PWM信号を出力するPWM信号出力回路であって、モータの回転速度に応じた周期を有するとともに論理レベルが交互に変化する速度信号に基づいて速度信号の周期の検出する検出部と、検出部で検出された周期内の一方の論理レベル期間内でモータのモータコイルに流れる電流を増加させた後に減少させるためのPWM信号を生成する第1生成部と、周期内の他方の論理レベル期間内で所定のデューティ比のPWM信号を生成する第2生成部と、を備える。
(もっと読む)
モータ駆動装置及び記録装置
【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
1 - 20 / 551
[ Back to top ]