
Fターム[5H572AA08]の内容
Fターム[5H572AA08]に分類される特許
1 - 20 / 23
制御装置、制御方法、及びプログラム
【課題】モータの高効率なトルク制御を可能にして、エネルギーの無駄を小さく抑えることの可能な制御装置を提供する。
【解決手段】制御装置4は、第1条件判断器16と、第2条件判断器17と、第1加算器20と、第2加算器21とを有する。第1,第2条件判断器16,17は、それぞれ、速度指令が示す角速度を条件として、第1,第2モータ5,6の出力トルクを設定するための第1,第2補正乗数を求める。第1加算器20は、前記角速度に第1補正乗数を乗じた値と、第1のトルク値とを加算することで第1モータ5の出力トルクを求めて、出力トルクを示す第1モータ5の駆動信号を出力する。第2加算器21は、前記角速度に第2補正乗数を乗じた値と、第1のトルク値と正負が反対である第2のトルク値とを加算することで、第2モータ6の出力トルクを求めて、該出力トルクを示す第2モータ6の駆動信号を出力する。
(もっと読む)
作業機械の電液駆動システム

【課題】 作業機械の構造体を駆動する液圧モータと電動機とを備えさせるとともに、動力源で駆動する液圧ポンプと電動機とを備えさせて、液圧と電気とにより効率的な運転ができる作業機械の電液駆動システムを提供すること。
【解決手段】 作動油の流量をコントロール弁6で調整して上部旋回体16を駆動する作業機械の電油駆動システムを、エンジン2で駆動する油圧ポンプ4と第一電動機5とを有する電油ポンプ3と、前記電油ポンプ3から供給する作動油で回転させる油圧モータ10と第二電動機11とを有する電油モータ9とによって構成し、前記電油ポンプ3の負荷と前記電油モータ9の負荷とから、前記第一電動機5と前記第二電動機11の動作状態を決定する制御装置7を備えているようにする。
(もっと読む)
電動動作装置及びそれを用いた作業機械
【課題】シンプルで部品点数も少ない構成で自動的にバランスを修正できる信頼性の高い電動動作装置及びそれを用いた作業機械を提供することにある。
【解決手段】第一の電動アクチュエータ1は、ロータ位置センサSを有する電気モータM1を備え、第二の電動アクチュエータ2は、ロータ位置センサを有さない電気モータM2を備える。第一の電動アクチュエータ1と第二の電動アクチュエータ2の出力は、不等長リンク3により合成される。電気モータM1は、その運転条件で最大のトルクを発生するロータと磁界の位置関係にあり、電気モータM2は、その運転条件で最大のトルクを発生するロータと磁界の位置関係から外れて最大のトルクから減少したトルクを発生するような運転状態となる。
(もっと読む)
サーボ制御システム及び作業機械
【課題】複数のユニットを共通のDCバスに接続することによりメンテナンス性の向上及び省スペース化を図ると共に、低抵抗にユニット間を接続可能なサーボ制御システムを提供する。
【解決手段】サーボ制御システム1は、出力端がバッテリに接続されており、バッテリの充放電を行う昇降圧コンバータユニット62と、出力端が交流電動機に接続されており、直流電力を交流電力に変換して交流電動機を駆動する複数のインバータユニット63〜66とを備えるサーボ制御システムにおいて、昇降圧コンバータユニット62及び複数のインバータユニット63〜66は、1つの板状台座67内に固定されており、昇降圧コンバータユニット62の入力端及び前記インバータユニット63〜66の入力端は、ブスバーからなるDCバスに接続されていることを特徴とする。
(もっと読む)
駆動装置及び駆動方法
【課題】 大きな負荷がかかる起動時には、低回転域でも大きな回転力が得られる流体モータを使用して楽に起動させると共に電動モータの焼損を回避させ、起動後は電動モータにより安定して通常運転させ、よって、電動モータの起動時に必要であったスターデルタやリアクトル抵抗器等の付帯設備を不要又は小さくしてコストの低減、制御盤のコンパクト化、マグネットスイッチの接点寿命の長期化、電源設備容量の低下によるランニングコストの低減等を図ることができる駆動技術の提供。
【解決手段】 ジョークラッシャー1の駆動軸50に連結された電動モータM1及び流体モータM2と、起動時は流体モータにより駆動軸を駆動させ、この駆動軸が設定回転数に上昇したのを検出すると、流体モータから電動モータに切り替えて駆動軸を駆動させるように制御する制御装置51と、を備えている。
(もっと読む)
一つのインバータで複数のモータを駆動することにより、回転子の非同期及び同期の可変周波数速度制御を実現するシステム
【課題】 一つのインバータで複数のモータを駆動することにより、回転子の非同期及び同期の可変周波数速度制御を実現できる小型で安価なシステムを提供する。
【解決手段】 この可変周波数速度制御システムは、モータグループ1、整流器グループ2、チョッパグループ3、アイソレータグループ4、電流制限器グループ5、電力コンデンサグループ6、インバータ7、速度フィードバック電圧検出器8及び電流フィードバック電圧検出器9を備えている。モータM1〜M4のオンライン制御にあたり、モータの定格出力に応じて、フルブリッジインバータ7またはハーフブリッジインバータの電圧出力をモータの付加逆起電力として取得し、チョッパIGBT1〜IGBT4をリアルタイムに作動させ、モータの非同期及び同期制御を実現する。このシステムはクレーンの上昇、起伏、旋回、走行を含む複合作業に好ましく適用できる。
(もっと読む)
クレーンシステム
【課題】複数のクレーンを効率的に運転するクレーンシステムを提供する。
【解決手段】システムコントローラ5は、受電部4と複数のクレーンの電力を受信する送受信部と、受電部電力が最大電力を超えないように荷役コマンドに対応したクレーン最大電力を生成するクレーン最大電力生成部を備え、クレーンは操作信号と荷役コマンドと最大電力に基づいて巻上部・走行部・横行部・起伏部の速度プロファイルを生成しこれより位置指令を生成して各部のインバータに位置指令を送信しインバータから状態情報を受信するクレーンコントローラと、商用電源から第1直流電源を生成するコンバータと、第1直流電源から前記位置指令に基づいて交流電源を生成し巻上部・走行部・横行部・起伏部のモータを駆動する複数のインバータと、第1直流電源と第2直流電源の間にあり双方向に電力を変換するチョッパと、第2直流電源に接続した蓄電部と、を備えた。
(もっと読む)
成形品製造設備及びその制御方法
【課題】 回生電力の損出をできるだけ少なくして回生電力を従来よりも有効に活用することができる製造品製造設備を提供する。
【解決手段】射出成形機2と成形品取出機11に対して設けられた管理装置10内の動作タイミング出力部17は、少なくとも1つの駆動用モータが回生状態にあるときに、他の少なくとも1つの駆動用モータが力行状態における加速状態にある重合期間を含むように構成された動作タイミングを出力する。接続関係切換回路20は、重合期間において、回生状態にある駆動用モータが発生する回生電流を力行状態にある駆動用モータに負荷電流として供給するように切換動作をする。
(もっと読む)
電動機制御装置及び電動機駆動方法
【課題】 ガントリー機構などを持つ複数の電動機を駆動する機械であっても、上位指令装置を必要とすることなく試運転が可能な電動機制御装置及び電動機駆動方法を提供する。
【解決手段】 位置制御部141〜143と、速度制御部151〜153と、電動機駆動回路161〜163を複数備えると共に、連続運転パターンを設定するためのパラメータを駆動する複数の電動機4〜6毎にメモリに格納し、指令パターン生成部12で位置指令を生成する際にはメモリ18から読み出す、パラメータ変更・読み出し部17を備え、指令パターン生成部12が、メモリ18に格納された各電動機毎のパラメータをパラメータ変更・読み出し部17により読出し、各電動機4〜6毎の連続運転パターンを設定する。
(もっと読む)
複数の電動機の駆動装置及び該装置の制御方法
【課題】複数の電動機をそれぞれの制御手段により電気的に同期させつつ駆動制御する駆動装置において、ある制御手段に異常が発生した場合でも、健全な制御手段により前記複数の電動機を同期させるように駆動制御可能な複数の電動機の駆動装置を提供する。
【解決手段】複数の交流モータ1−A、1−Bと、前記各交流モータの回転速度/回転位置を検出するエンコーダ2−A、2−Bと、速度指令部5からの共通の速度指令によりそれぞれのエンコーダ信号をフィードバックしてそれぞれのモータを駆動する複数の制御装置A、Bと、が備えられる。かかる構成において、複数の制御装置A、Bのうちのある制御装置が異常になった場合、駆動回路を切り換えて、健全な制御装置で複数の交流モータ1−A、1−Bを同期駆動する。
(もっと読む)
マルチ駆動モータの制御装置
【課題】マルチ駆動モータに関するサーボ制御を簡易化することが可能な制御装置を提供する。
【解決手段】第1の要素モータ11が有する位置検出装置11bから出力されたモータの回転軸の角度についての位置情報に基づいて、目標値に対して所定範囲内に制御するための制御信号を生成する制御処理部1aと、制御処理部1aからの制御信号に基づいてマルチ駆動モータをなす各要素モータ11、12、13、14を駆動するドライバ1bを備え、要素モータ11、12、13、14は、それぞれ3相の同期ACモータからなるモータ11a、12a、13a、14aを有し、要素モータ11は、モータ11aに接続された上記の位置検出装置11bを有し、ドライバ1bは、要素モータ11、12、13、14毎に、モータの相(U相、V相及びW相)数、3本のモータ電流線1cを介してモータを駆動するためのモータ電流を出力する構成を有している。
(もっと読む)
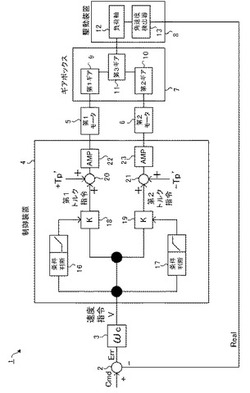
電動機制御方法とそれを用いた電動機制御装置及びシステム制御装置
【課題】 複数の電動機による負荷バランス可能で与えられた速度指令どおりに制御でき、しかも他の電動機制御装置との連携を必要とせず、各電動機を独立して運転可能な電動機制御方法とそれを用いた電動機制御装置及びシステム制御装置を提供する。
【解決手段】 トルク指令に対する電動機の垂下特性信号を演算し、垂下特性信号を用いて速度指令を修正し、垂下特性信号の応答を遅らせた第2の垂下特性信号を演算し、第2の垂下特性信号を先の垂下特性信号とは逆符号で速度指令を修正するという手順で処理する。
(もっと読む)
搬送装置
【課題】モータ間の干渉による搬送装置の振動を抑制する。
【解決手段】指令パルスに対する位置誤差を加減算器16で求めて、位置制御器2で速度指令を発生し、速度指令との速度誤差を加減算器18で求め、速度制御器4で電流指令を発生し、マスターモータM1に加える。スレーブモータ側の速度をパルスジェネレータで求めて速度指令からの誤差を求め、スレーブ側の電流指令を発生する。マスター側の電流指令とスレーブ側の電流指令を加減算器21で組み合わせて、スレーブモータM2に加える。
(もっと読む)
可動テーブルの制御装置およびそれを備えた可動テーブル装置
【課題】 ケーブル重量を考慮してアクチュエータに推力を分配することで、位置決め精度を高め、整定時間を短縮し、高性能な制御が可能な可動テーブル制御装置を提供する。
【解決手段】 固定部との間に電力線などのケーブルによって接続された可動テーブル107を駆動するアクチュエータ105及び106と、該アクチュエータの発生する推力を制御するアクチュエータ推力制御器103及び104と、可動テーブル107の位置指令から重心まわり推力指令を算出する制御器101と、重心まわり推力指令をアクチュエータ推力指令に変換する推力指令変換器10とを備えた可動テーブル制御装置において、推力指令変換器10が可動テーブル107のみの重心位置をケーブル込み重心位置に換算する重心位置変換器12と、可動テーブル107の位置指令値またはフィードバック値を用いてケーブルのテンションを算出するケーブルテンション算出器13と、を備える。
(もっと読む)
アクチュエータおよび搬送装置
【課題】薄シートの搬送において精度の高い的確な動作を得ることができ、複数の動作方向を備えて薄シートの搬送方向を簡単に多方向へ変更することができるアクチュエータおよび薄シート搬送装置を提供する。
【解決手段】ベース面上における三角形の各頂点をなす位置のそれぞれに配置し、少なくともベース面の垂線方向に沿った方向成分を含んで振動する3つの振動子と、3つの振動子で三点支持して配置し、作用点が搬送対象物に当接する駆動体と、各振動子をそれぞれ選択的に駆動する駆動制御手段を備え、各振動子における駆動体の支点および駆動体の作用点が三角錐の各頂点をなす位置にそれぞれ対応し、かつ各振動子における駆動体の支点を結ぶ形状が正三角形をなし、各振動子の選択的な駆動により作用点が所定の運動方位に沿って円運動もしくは楕円運動する。
(もっと読む)
アクチュエータの駆動制御方法およびアクチュエータによる搬送制御方法
【課題】薄シートの搬送において精度の高い的確な動作を得ることができ、複数の動作方向を備えて薄シートの搬送方向を簡単に多方向へ変更することができるアクチュエータの駆動制御方法を提供する。
【解決手段】ベース面上に配置した3つのボイスコイルモータ3の各コイルボビン4で駆動体14を三点支持してなり、各コイルボビン4における駆動体14の支点16、17、18および駆動体14の作用点15が三角錐の各頂点をなす位置にそれぞれ対応し、かつ各コイルボビン4における駆動体14の支点16、17、18を結ぶ形状が正三角形をなし、駆動体14の作用点15が搬送対象物に当接し、各ボイスコイルモータ3のコイルボビン4が少なくともベース面の垂線方向に沿った方向成分を含んで振動するアクチュエータにおいて、各ボイスコイルモータ3に印加する電流パルスを制御して各コイルボビン4をそれぞれ選択的に駆動することにより、駆動体14の作用点15を所定の運動方位に沿って運動させる。
(もっと読む)
船舶機械駆動システム
【課題】 設備コストを低減することができるとともに、船舶機械の可用性を向上することのできる船舶機械駆動システムを提供する。
【解決手段】 駆動源として電動モータ51a〜54aを有する複数の船舶機械51〜54を駆動する船舶機械駆動システムにおいて、各電動モータ51a〜54aを制御する複数のインバータ31,32と、所定の電動モータの制御に使用するインバータを複数のインバータ31,32の中から決定する制御装置20とを備える。
(もっと読む)
電気ドライブトレイン熱保護システム
移動機械(18)用の電気ドライブトレイン(10)が開示される。電気ドライブトレインが、少なくとも1つの電力消費デバイス(36〜40)と、少なくとも1つの電力消費デバイスに関連付けられたセンサ(54〜58)と、電力消費デバイスおよびセンサと通信する制御装置(62)とを有する。センサは、電力消費デバイスの温度を示す信号を発生するように構成される。制御装置は、少なくとも1つの電力消費デバイスの電力消費レベルを、信号の値に対応する量に制限するように構成される。 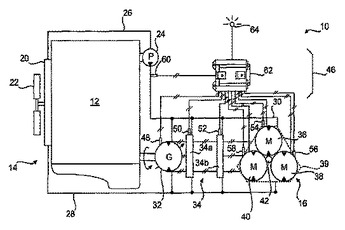 (もっと読む)
(もっと読む)
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
回転位相検出装置及び同期制御装置
【課題】Z相付きインクリメンタルエンコーダのZ相信号にノイズが侵入しても、このノイズを除去し、正確な回転位相の検出を実現し、高精度の同期制御を実現すること。
【解決手段】電動機07aに設けたZ相付きインクリメンタルエンコーダ09aの出力が回転位相検出装置4に入力する。回転位相検出装置4は、Z相信号をクロック信号により位相シフトしZ相信号に含まれるノイズをキャンセルするノイズキャンセラー6fと、Z相信号の発生位相近傍以外の禁止区間で侵入するノイズを除去するZバンド発生器7f及びZ相監視器9fを有する。そして、電動機07aの回転速度が低速度であるときはノイズキャンセラー6fの作用によりZ相信号に侵入したノイズを除去し、さらにZバンド発生器7fの作用によりZ相信号に侵入したノイズを除去する。また、Z相監視器9fによりノイズの発生状況を定量的に検出する。
(もっと読む)
1 - 20 / 23
[ Back to top ]