
Fターム[5H572JJ04]の内容
Fターム[5H572JJ04]に分類される特許
1 - 20 / 34
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
電動機制御装置及び電動機制御方法

【課題】複数の電動機を制御する場合における異常の予測または検知を好適に実行すること。
【解決手段】複数の電動機を統括制御する電動機制御方法であって、複数の制御器によって複数の電動機を個別に制御し、複数の制御器夫々による電動機の制御の電気的状態を検知し、複数の電気状態検知部によって夫々検知された電気的状態に基づいて前記複数の電動機夫々の特性を示す状態特性値に関する値を算出し、予め記憶された複数の電動機夫々の特性の初期状態を示す初期特性値に基づいて算出された状態特性に関する値に対応する比較対象値を算出し、比較対象値と状態特性値に関する値とを比較し、その比較結果に基づいて電動機夫々の劣化を判断し、複数の電動機に共通する条件に基づいて比較対象値の算出または比較対象値と状態特性値に関する値との比較を行うことを特徴とする。
(もっと読む)
モータを可変速駆動装置にホット接続する方法
【課題】過大電流を起こさないで、追加のモータをホット接続すること。
【解決手段】第1のモータM1を可変速駆動装置Dから切断するステップと、少なくとも1つの第1のモータM1の状態推定器を、少なくとも1つの第1のモータM1の予め確立された負荷モデルに基づいて初期設定するステップであって、前記状態推定器が、少なくとも1つの第1のモータM1の推定状態の、時間にわたる進展を計算することが可能であり、推定状態が、少なくとも1つの第1のモータM1の少なくとも速度を含むステップと、追加のモータM2を可変速駆動装置Dに接続するステップと、少なくとも1つの第1のモータM1の推定状態に達する指令を用いて、追加のモータM2を始動するステップと、追加のモータの状態が、少なくとも1つの第1のモータM1の推定状態に達したときに、前記少なくとも1つの第1のモータM1を再接続するステップとを含む。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、加速度センサを用いることなく車体の振動乗り心地を改善する。
【解決手段】台車6に装荷された2台の電動機61がそれぞれ歯車を内蔵した駆動装置を介して2組の車輪を駆動することにより走行する電気車両であり、2台の電動機に逆方向のトルク変動を重畳することにより台車の上下振動を抑制し間接的に車体の振動抑制制御を行う電気車制御装置において、電気車制御装置の振動抑制制御は2台の電動機に逆方向の振動トルクを加えた際の台車の上下振動特性と2台の電動機に逆方向の振動トルクを加えた際の2台の電動機の回転速度差の振動特性をもとに構築され、2台の電動機の回転速度差情報を用いて台車振動を抑制する。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
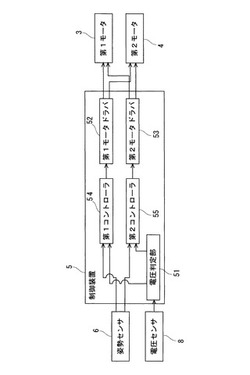
省エネ運転支援システム
【課題】冷間タンデム圧延機や冷間シングル圧延機において、電機品を機器効率が高い負荷で運転させるようなパススケジュール設定を行うことにより、設備の省エネ運転を実現することができる省エネ運転支援システムを提供する。
【解決手段】設定計算装置7には、モータ3の効率、ドライブ装置4の効率、トランス5の効率に基づいて得られた圧延機2の最大効率が、記憶手段12に記憶されている。設定計算手段8によって圧延機2に対する負荷配分及びライン速度の設定計算が行われると、効率演算手段10は、設定計算手段8が計算した負荷配分で圧延を行った時の圧延機2の効率を演算する。そして、修正手段13は、記憶手段12に記憶された最大効率と効率演算手段10によって演算された効率との差が小さくなるように、設定計算手段8が計算したライン速度を修正する。
(もっと読む)
プリンタの制御装置
【課題】複数のモータが駆動源として存在する駆動制御系において、コギングトルクリップルの影響を抑制し、速度変動等の影響を受け難いプリンタの制御装置を提供することを目的とする。
【解決手段】第1のモータ、第2のモータのそれぞれのコギングトルクリップルを抑制する補正値を加算した第1のフィードフォワード制御系と第2のフィードフォワード制御系とを設け、フィードバック制御系と上記第1のフィードフォワード制御系と上記第2のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と第1のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と上記第2のフィードフォワード制御系との組み合わせとのいずれかを選択する。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
冷却システムの診断装置
【課題】温度センサが設けられていない機器を含む複数の機器を冷却する冷却システムの異常を判定する。
【解決手段】第1インバータ210、第2インバータ220およびコンバータ200は、共通の冷却媒体によって冷却される。第1インバータ210、第2インバータ220およびコンバータ200のうち、コンバータ200に対しては温度センサが設けられていない。第2インバータ220の温度が第1しきい値を超えた場合には、第1インバータ210の温度が上昇し得るように、第1インバータ210の発熱量が増大される。第1インバータ210の温度および第2インバータ220の温度の両方が第2しきい値を超えると、冷却システム300が異常であると判定される。
(もっと読む)
負荷制御装置
【課題】2つの回転型誘導性負荷の磁極位置を短時間で導出すること。
【解決手段】負荷制御装置は、直流電圧を交流電圧に変換して、同じ諸元の2つの回転型誘導性負荷に印加する2つの電力変換部と、電力変換部に供給される直流電流を検出する電流検出部と、電力変換部を制御する制御部とを備える。制御部は、2つの負荷に同一の電圧ベクトルを所定の角度毎に電気角度で一周期分、同時に入力するよう制御し、電流検出部が検出した直流電流及びそのときの電圧ベクトルの角度に基づいて、2つの負荷における総δ軸電流を算出し、一点の角度の電圧ベクトルを一方の負荷に入力するよう制御し、このとき電流検出部が検出した直流電流及び一点の角度の電圧ベクトルに応じた負荷におけるδ軸電流を算出し、総δ軸電流に関するパラメータ、一点の角度、及び一点の角度に応じたδ軸電流に基づいて、2つの負荷の各電流応答を算出し、当該電流応答の位相成分から各負荷の磁極位置を導出する。
(もっと読む)
制御装置
【課題】モータの動作に精度が要求されるときに、インバータのPWM方式の切り替えに伴い発生するモータのトルク変動の影響を回避でき、モータの動作に精度が要求されないときに、PWM方式の切り替えによる効果を得ることができる制御装置を得ること。
【解決手段】制御装置は、複数のPWM方式のうちインバータのPWM動作に用いるためのPWM方式の切り替えを行う切り替え部と、動作指令信号により第1の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを不許可とし、前記動作指令信号により第2の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを許可する指令判断部とを備え、前記切り替え部は、前記指令判断部により切り替えが不許可とされた場合、PWM方式の切り替えを行わず、前記指令判断部により切り替えが許可された場合、PWM方式の切り替えを行う。
(もっと読む)
モータ制御装置
【課題】機械的な規制手段により停止されるモータを含む複数のモータを同期制御する。
【解決手段】モータ制御装置10は、単位動作量が各モータに共通するように各モータの実動作量情報が変換された基準動作量情報に基づいて各モータを同期させて駆動制御を行う制御部9と、複数のモータのうちの1つである第1モータ1が規制手段により規制端点で停止した際の基準動作量情報を停止位置情報として取得する停止位置情報取得部6と、規制端点の理論的な位置である基準停止位置を基準動作量情報に換算した基準停止位置情報と停止位置情報とに基づいて、理論的に基準停止位置において動作するモータの少なくとも1つを基準モータとして補正パラメータを演算する補正パラメータ演算部7と、補正パラメータに基づいて少なくとも第1モータ1を含むモータの基準動作量情報を補正する補正部8とを備える。
(もっと読む)
洗濯機のモータ駆動装置
【課題】モータを高速回転させる場合に必要となる昇圧電圧をより確実に発生できる洗濯機のモータ駆動装置を提供する。
【解決手段】制御回路42Bは、脱水運転を行う場合の制御パラメータであるドラムモータ5の回転数の変化に応じて、IGBT48により交流電源の電圧波形のゼロクロスタイミング間に全波整流回路45の入力端子間を短絡させる回数を変化させ、リアクトル44に蓄積された電磁エネルギーを有効に利用して、全波整流回路45より出力される直流電源電圧をより高く昇圧する。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
回転電機駆動制御装置
【課題】縮退運転時の短絡電流によるモータジェネレータ駆動回路の素子故障の拡大を、より確実に防止することができるモータジェネレータ駆動制御装置の提供。
【解決手段】2つのモータジェネレータの回転数、および、それに接続された各インバータ装置の異常を、縮退運転指示部310によりそれぞれ検出する。そして、異常が検出されると、制御装置300は、異常が検出されたインバータ装置の作動を停止して、該インバータ装置に接続されたモータジェネレータが他のモータジェネレータにより連れ回される状態となるような運転指令を出力する。回転数指示部330は、連れ回されているモータジェネレータの回転数N1が所定許容回転数N1maxを超えたときに、異常でないインバータ装置に接続されたモータジェネレータの回転数N2を減少させるような運転指令(回転制御)を出力する。
(もっと読む)
XY位置決め装置の駆動制御装置
【課題】複数のモータ軸を用いて1つの負荷を駆動する際に、モータ軸同士の干渉を抑えながら、最適な位置決め制御を可能とする。
【解決手段】複数のモータ軸を用いて1つの負荷Lを駆動するXY位置決め装置において、各モータ軸の制御系内に設けられた外乱オブザーバ68L、68Rと、該外乱オブザーバの出力部分に設けられた、位置偏差を監視し、位置偏差の量に応じて外乱オブザーバの出力を制限するオブザーバ出力調整部70L、70R、70と、を備え、位置偏差の量が多い場合には外乱オブザーバの出力を多く戻して積極的に補償を行ない、位置偏差の量が少ない場合には外乱オブザーバの出力を制限する。
(もっと読む)
グラビア印刷機およびその制御方法
【課題】各印刷ユニットによる印刷の見当ずれを早期に定常状態に収束させることができるグラビア印刷機およびその制御方法を提供する。
【解決手段】グラビア印刷機は、最初にウェブWに印刷を施す前段印刷ユニット10aと、前段印刷ユニット10aの下流側に設けられた後段印刷ユニット10b、10c、10dとを備えている。各後段印刷ユニット10b、10c、10dは、ウェブW上の見当マークを検出する見当マーク検出センサ15b、15c、15dと、印刷ユニット間の張力を検出する張力検出器18b、18c、18dとを各々有している。また、グラビア印刷機は制御装置30を有している。制御装置30は、見当ずれの大きさならびにウェブWの張力の所定時刻間の偏差に基づいて、モータ13b、13c、13dの制御量修正値を経時的に算出するようになっている。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
複数軸同期制御システムおよび複数軸同期制御方法
【課題】多軸の同期制御において,制御対象軸間の特性バラつきの影響が直接的に制御特性のバラつきに現れるのを防ぎ,相対的な偏差を重点的に抑圧することを目的とする。
【解決手段】一つの目標指令2による制御対象を構成する複数の制御対象軸14,24の各々について,その入力と出力を,規範モデル16,26によって生成する所望の入出力特性と比較し,差違を抑圧するような補償入力を算出して,一次制御入力11,21に加算することによって,各制御対象軸14,24を構成する要素特性のバラつきの影響を抑圧し,その各制御対象軸14,24の制御系全体を,マスタ−スレーブ構造3とし,マスタ−スレーブ方式と規範モデル制御則とを併用したハイブリッド同期制御構成とする。
(もっと読む)
1 - 20 / 34
[ Back to top ]