
Fターム[5H572JJ25]の内容
Fターム[5H572JJ25]に分類される特許
1 - 20 / 26
同期制御システム
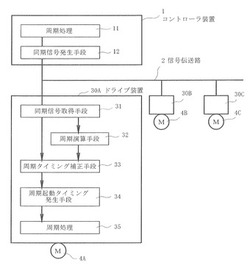
【課題】コントローラ装置の制御周期Tcがドライブ装置の駆動周期Tdの整数倍ではない場合にも同期を確保して設計上の自由度を増大させる。
【解決手段】コントローラ装置1の制御周期よりも駆動周期が短いドライブ装置30Aが、コントローラ装置1からの同期信号に合わせて駆動周期の起動タイミングを調整する周期タイミング補正手段33を備え、調整後の起動タイミングに従って駆動されるシステムにおいて、制御周期が駆動周期の整数倍でない場合に、制御周期に含まれる駆動周期の回数と端数時間とを求め、駆動周期の回数を変えずに1回以上の駆動周期を増加させた時の増加分の合計時間が前記端数時間に一致するように当該駆動周期を演算し、または、駆動周期の回数を増加させて1回以上の駆動周期を減少させた時の減少分の合計時間が元の駆動周期と端数時間との差に一致するように当該駆動周期を演算する周期演算手段32を備える。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、複数の回転電機の少なくとも1つにトルク変動が生じたときに、蓄電装置の入出力電力の変動を抑制することである。
【解決手段】回転電機制御システム10は、駆動用回転電機(MG2)12、発電用回転電機(MG1)14、MG2とMG1に共通の電源部16、MG2用の制御ブロック18、MG1用の制御ブロック19、MG2制御装置60、MG1制御装置62を含んで構成される。MG1制御装置62は、MG2のトルク変動を抑制するための変動抑制トルクのトルク位相を演算する変動抑制トルク位相演算部70と、変動抑制トルクのトルク振幅を演算する変動抑制トルク振幅演算部72と、演算された変動抑制トルクをMG1のトルク指令値に重畳し、これを変動抑制トルク指令値として演算する変動抑制トルク指令演算部74を含んで構成される。
(もっと読む)
制御装置、制御方法、及びプログラム
【課題】モータの高効率なトルク制御を可能にして、エネルギーの無駄を小さく抑えることの可能な制御装置を提供する。
【解決手段】制御装置4は、第1条件判断器16と、第2条件判断器17と、第1加算器20と、第2加算器21とを有する。第1,第2条件判断器16,17は、それぞれ、速度指令が示す角速度を条件として、第1,第2モータ5,6の出力トルクを設定するための第1,第2補正乗数を求める。第1加算器20は、前記角速度に第1補正乗数を乗じた値と、第1のトルク値とを加算することで第1モータ5の出力トルクを求めて、出力トルクを示す第1モータ5の駆動信号を出力する。第2加算器21は、前記角速度に第2補正乗数を乗じた値と、第1のトルク値と正負が反対である第2のトルク値とを加算することで、第2モータ6の出力トルクを求めて、該出力トルクを示す第2モータ6の駆動信号を出力する。
(もっと読む)
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
プリンタの制御装置
【課題】複数のモータが駆動源として存在する駆動制御系において、コギングトルクリップルの影響を抑制し、速度変動等の影響を受け難いプリンタの制御装置を提供することを目的とする。
【解決手段】第1のモータ、第2のモータのそれぞれのコギングトルクリップルを抑制する補正値を加算した第1のフィードフォワード制御系と第2のフィードフォワード制御系とを設け、フィードバック制御系と上記第1のフィードフォワード制御系と上記第2のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と第1のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と上記第2のフィードフォワード制御系との組み合わせとのいずれかを選択する。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受け難く、検出精度の高い交流電動機の監視装置を得る。
【解決手段】共通の交流電源1に並列接続された複数の交流電動機3の異常を監視する監視装置であって、電圧検出手段6と、個別電流検出手段5と、全電流検出手段4と、電圧検出手段6、個別電流検出手段5及び全電流検出手段4の出力から各々の個別の電力及び全体の電力を演算する電力演算手段74と、電圧検出手段4、個別電流検出手段5及び全電流検出手段4の出力からそれぞれの実効値を演算する実効値演算手段75と、電力演算手段74と実効値演算手段75の出力から、全電流と前記個別電流の各々の位相差を演算する位相差演算手段77とで構成する。各々の位相差が交流電動機3によって定められた異常判定レベルを超えたとき、交流電動機3が異常であると判定する。
(もっと読む)
洗濯機のモータ駆動装置
【課題】モータを高速回転させる場合に必要となる昇圧電圧をより確実に発生できる洗濯機のモータ駆動装置を提供する。
【解決手段】制御回路42Bは、脱水運転を行う場合の制御パラメータであるドラムモータ5の回転数の変化に応じて、IGBT48により交流電源の電圧波形のゼロクロスタイミング間に全波整流回路45の入力端子間を短絡させる回数を変化させ、リアクトル44に蓄積された電磁エネルギーを有効に利用して、全波整流回路45より出力される直流電源電圧をより高く昇圧する。
(もっと読む)
バックラッシュ除去制御装置
【課題】加工時にはバックラッシュやロストモーションの発生を防止し、送り時には可動部材を高速送りする。
【解決手段】加工時には、2つのモータ11,21のうちの一方が可動部材GLを移動させるためのトルクを発生すると共に両モータ11,21が逆回転方向のオフセットトルクを発生することにより、バックラッシュやロストモーションの発生を防止する。送り時には、2つのモータ11,21可動部材GLを同方向に移動させるトルクを発生することにより、可動部材GLを高速移動動作させることができる。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
船舶用インバータシステム
【課題】複数のインバータで駆動する多巻誘導電動機において、インバータの数を減らして駆動する場合の電動機速度制御の応答速度を改善する船舶用インバータシステムを提供する。
【解決手段】船舶の主推進用誘導電動機へ1次電流を供給する複数のインバータと、前記各インバータに駆動される非推進装置用誘導電動機と、主推進用誘導電動機の速度検出器および電流検出器と、トルク電流成分指令信号を出力する速度制御器と、主推進用誘導電動機と導通しているインバータの台数信号に基づいて磁束指令信号に乗ずるゲイン信号を出力する磁束指令補正器と、からなる船舶用インバータシステムであって、インバータは速度検出信号と電流検出信号とトルク電流成分指令信号と磁束指令信号と磁束指令信号に乗ずるゲイン信号に基づいたベクトル制御演算により操作されるので、インバータの台数が減少しても、主推進用誘導電動機の速度制御の応答速度の低下を抑制できる。
(もっと読む)
電動車両の駆動システムの制御装置および制御方法
【課題】複数の駆動輪とモータユニットを備え、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させる。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
(もっと読む)
車両運動の安定化制御装置
【課題】 強いオーバーステア特性により高い旋回性能を得つつ、安定限界速度以上の車速において、車両の旋回特性および直進性の安定化を図ることができる車両運動の安定化制御装置を提供する。
【解決手段】 車速が安定限界速度Vc以上の場合、左右駆動力差に対して、運動特性の不安定性を補償するための安定化フィードバック操作代usを設定する安定化フィードバック操作代演算部105と、安定化フィードバック操作代usの範囲内で、ヨーレートγをフィードバック制御で安定化するための安定化フィードバック操作量uFBを設定するF/B指令部108と、安定化フィードバック操作量uFBの限界量(ulmax,urmax)に対して、安定化フィードバック操作代usを確保した上で、車両を安定に走行させるための安定化フィードフォワード操作量uFFrl,uFFrrを設定するF/F指令部107と、を有する。
(もっと読む)
動力制御装置及び列車制御システム
【課題】ばね特性を持つ連結器により複数の車両が連結されて成る列車の連成振動を低コストに抑え、列車の乗り心地を向上させる。
【解決手段】列車を構成する車両c1〜c6のうち動力装置m2,m4,m5を有する動力車のいくつかが進行方向の運動を検出するセンサa5を持ち、該動力装置m2,m4,m5を制御する動力制御装置i2,i4,i5が該センサa5の出力から列車の連成振動の振動モードに相当する周波数成分を抽出する振動抽出部を持ち、該動力制御装置i2,i4,i5が該振動抽出部の出力を抑えるように該動力装置m2,m4,m5を制御する。
(もっと読む)
電動機制御装置
【課題】PWM信号で2基の三相電動機を駆動する場合、大電流スイッチングに伴う大きな電流パルスが発生し、平滑用コンデンサの負担が大きくなっていた。しかし、スイッチングのタイミングを互いにずらせる方法が提案されているがずらせる位相の自由度、あるいは回路規模の点で問題があった。本発明は出来るだけ簡単な回路規模で任意に位相調整を可能にする装置の実現を目的とした。
【解決手段】2基の電動機制御用の2組のPWM波形を生成する周期の等しい2キャリアの周期をクロックの数で計数し、一方のキャリアに対し所定の計数値だけ異なる位相差を設定し、この状態でキャリアの周期単位で計数値を積算し、所望の位相差となるように相互の位相関係をずらせる方法としている。
(もっと読む)
電気自動車の制御装置
【課題】直流電源の電圧を昇圧コンバータで昇圧して電源ラインにシステム電圧を発生させ、このシステム電圧によりインバータを介して交流モータを駆動するシステムの電源ラインの電圧安定化効果を高める。
【解決手段】システム起動直後で平滑コンデンサ24のプリチャージ完了前に、システム電圧を目標値に一致させるように昇圧コンバータ21の出力電圧を制御する変換電圧制御を実行することで、平滑コンデンサ24のプリチャージを行ってシステム電圧を速やかに目標値に制御する。その後、平滑コンデンサ24のプリチャージ完了後に、変換電圧制御から変換電力制御に切り換えて、昇圧コンバータ21の出力電力を指令値に一致させるように昇圧コンバータ21の出力電力を制御すると共に、この変換電力制御の実行中は、第2のMGユニット30の入力電力操作によるシステム電圧の制御を禁止する。
(もっと読む)
電気自動車の制御装置
【課題】直流電源の電圧を昇圧コンバータで昇圧して電源ラインにシステム電圧を発生させ、このシステム電圧によりインバータを介して交流モータを駆動するMGユニットを備えたシステムの電源ラインの電圧安定化効果を高める。
【解決手段】システム電圧の目標値Vs*と検出値Vsfとの偏差ΔVs が小さくなるようにMGユニット29,30の入力電力や昇圧コンバータ21の出力電力を操作してシステム電圧の変動を抑制するシステム電圧安定化制御を実行する。その際、車両の情報と各MGユニット29,30の情報と昇圧コンバータ21の情報を用いてMGユニット29,30と昇圧コンバータ21のうちの1つ又は2つ以上を選択することで、システム電圧安定化に必要な目標電力操作量Pm*を確実に実現できるようにMGユニット29,30や昇圧コンバータ21を選択してシステム電圧安定化制御を実行する。
(もっと読む)
舶用電気推進装置
【課題】 本発明の目的は、2つの電動機をバランスして制御し、より効率的に運転することができる舶用電気推進装置を提案することにある。
【解決手段】 2つのプロペラが相互に逆方向に回転する二重反転プロペラと、前記各プロペラを各々回転させる2つの電動機を有し、各電動機の回転速度を制御するための基準となる速度基準からトルク基準を演算し、各電動機を各々制御する舶用電気推進装置において、各電動機のトルクが等しくなるように、2つのトルク基準の差に基づいて、各速度基準のうちいずれか1つを修正するトルクバランス制御手段を具備することを特徴とする舶用電気推進装置。
(もっと読む)
電子装置、画像形成装置及びこれらの制御方法、並びに制御プログラム
【課題】小規模な回路且つ低コストで、無駄な電力の消費や負荷変動による脱調を防止することができる画像形成装置を提供する。
【解決手段】複数のモータを備える画像形成装置において、全てのモータに過剰なマージンを設定せずに、マージンは上流側の1つのモータM1だけに設定する。そして、上流側のモータM1の駆動電流値を検知して、その検知結果に応じて下流側のモータM2,M3の駆動電流値を決定する。又は、全てのモータに過剰なマージンを設定せずに、マージンは負荷の最も大きい1つのモータだけに設定する。そして、負荷の大きいモータM3の駆動電流値を検知して、その検知結果に応じて他のモータM1,M2の駆動電流値を決定する。
(もっと読む)
交流電圧出力装置およびそれを備えたハイブリッド自動車
【課題】中性点間に交流電圧を生成するための2つのインバータの電圧負担を変更することができる交流電圧出力装置を提供する。
【解決手段】乗算部140から出力される商用交流電圧の参照値VacrをFB制御部142により補償した交流電圧指令は、乗算部144によりk(0≦k≦1)倍されて第1のインバータ制御部62へ出力され、残余分が第2のインバータ制御部63へ出力される。第1および第2のインバータ制御部62,63は、各相電圧指令にAC出力制御部64からの交流電圧指令を重畳した電圧指令に基づいてそれぞれ信号PWM1,PWM2を生成する。
(もっと読む)
1 - 20 / 26
[ Back to top ]