
Fターム[5H572LL45]の内容
Fターム[5H572LL45]の下位に属するFターム
Fターム[5H572LL45]に分類される特許
1 - 17 / 17
シート搬送装置、画像形成装置、駆動制御プログラム及びシート搬送モータ制御システム
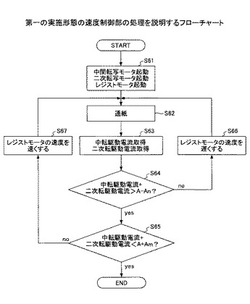
【課題】各回転体の回転を適切に制御し、3つ以上の互いに干渉し合う回転体の干渉を低減させることが可能とする。
【解決手段】第1の回転体と第2の回転体と第3の回転体とを有し、前記第1の回転体ないし第3の回転体のうち少なくとも何れか一つの回転体によりシート状媒体の搬送を行うシート搬送装置であって、前記第1の回転体を回転させる第1のモータの駆動を制御する第1制御要素を検出する第1検出手段と、前記第2の回転体を回転させる第2のモータの駆動を制御する第2制御要素を検出する第2検出手段と、前記第3の回転体を回転させる第3のモータの回転速度を制御するモータ制御手段と、前記第1制御要素と前記第2制御要素との和に基づき前記モータ制御手段に前記第3のモータの回転速度の変更を指示する速度制御手段と、を有する。
(もっと読む)
プロセス動作を保護するためのモータ保護システムの使用

【課題】プロセス動作を保護するためにモータ保護システムを使用する手法を提供する。
【解決手段】コントローラ220は、モータ保護測定値を使用して、リードモータ駆動式原動機120が故障しているかどうかを判定する。リードモータ駆動式原動機120が故障しているという判定に応答して、故障したリードモータ駆動式原動機120をトリップする前にラグモータ駆動式原動機130の動作をアクティブ化する。
(もっと読む)
単一のインバータによる複数台のBLDC三相直流モータの不良検出方法とその装置
【課題】 本発明は、単一のインバータにて運転する複数のBLDC三相直流モータの不良の有無と特定ができるようにした不良検出方法と装置を新規に提供することにある。
【解決手段】 本発明は複数台のBLDC三相直流モータを単一のインバータにて運転する際に、該モータ数より1つ少ない電流センサのそれぞれに該モータ中の1台の一相を直列に連結するとともに、該各センサに残りのすべてのモータの前記一相と異なる二相づつを各別に連結し、該インバータの出力切替と各相の+,−または0の電流値出力の相違により不良モータの有無と不良モータを特定するようにしたことを特徴とする単一のインバータによる複数台のBLDC三相直流モータの不良検出方法とその装置にある。
(もっと読む)
モータ制御回路
【課題】従来、異常状態を検知して、モータを流れる電流を停止させ、モータやドライバを破壊から守ることが出来ても、異常状態となった原因を知ることが出来ないと言った問題がある。
【解決手段】本発明は、複数のモータドライバを内蔵しても、1つのシリアルポートを共有して使用することで、外部端子数を削減すると共に、この1つのシリアルポートを使って、複数のモータドライバの異常状態をリアルタイムでマスタICが知ることが出来るモータ制御回路に関する。
(もっと読む)
平面モータ装置およびこの平面モータ装置を用いた位置決め装置
【課題】モータ電流指令値と実際電流との偏差が大きくても、加減速時など正常なドライバ動作時には電流偏差信号過大と認識しない、安定したインタロック機能を備えた平面モータおよびこの平面モータを用いた位置決め装置を実現する。
【解決手段】移動面に形成された固定子と、前記移動面に沿って移動する可動子とを備えた平面モータ装置において、前記可動子のモータ部10,11,12と、電流指令値Imu*,Imv*,Imw*が入力され、これらの電流指令値に応じたモータ電流Imu,Imv,Imwをモータ部に供給するドライバ部20,21,22と、電流指令値とモータ部に流れるモータ電流との電流偏差信号ΔImu,ΔImv,ΔImwが所定の閾値を超えたときにモータ部の駆動を制限する検出部30,31,32とを備え、検出部は、モータ部の加速度に応じ前記閾値を変化させる。
(もっと読む)
電気推進システムの保護方法
【課題】少なくとも1つの給電電路の保護装置が開路した場合でも、健全側給電電路が過負荷にならないようにする。
【解決手段】電池(B1,B2)と、この電池を充電する発電機(G1,G2)とからなるハイブリッド電源を2系統備えるとともに、各ハイブリッド電源から推進電動機に給電する2系統の給電電路(S1,S2)を備え、各給電電路にそれぞれ保護装置(CB1,CB2)を設けてなる電気推進システムにおいて、電池のみで推進電動機および補機類へ電力を供給して運転する電池運転モード時であって75%を超える推進電動機回転速度で運転中に、各給電電路の保護装置CB1,CB2のいずれかが開路したときは、推進電動機M1,M2の回転速度上限値を75%に制限することで、健全側給電電路が過負荷にならないようにする。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受けにくく、検出精度の高い交流電動機の監視装置を得る。
【解決手段】交流電源2から複数のヒステリシスモータ3にそれぞれ流れる個別電流を検出する個別電流検出手段例えば個別電流検出器5と、交流電源2から交流電動機3全体に流れる全電流を検出する全電流検出手段例えば全電流検出器4と、全電流検出器4及び個別電流検出器5によって同時に検出された電流検出値のうち、全電流検出値を基準とし、個別電流検出値との電流位相差がヒステリシスモータ3によって決められる異常判定レベル(規定値)を超えた時、ヒステリシスモータ3が異常と判定する判定手段例えば監視回路7を備えたもの。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
モータ制御装置及び印刷装置
【課題】 複数のモータを駆動するモータ駆動手段を備えたモータ制御装置において、サーマルシャットダウン手段の動作時にサービスエラーが発生するのを、一般的なモータ駆動手段を利用して信号線も増やすことなく実現可能とすること。
【解決手段】 ポリゴンモータのロックとメインモータのロックとが同時に外れた場合に(S2:N,S8:N)、サーマルシャットダウン回路が動作したと判断し、3秒待機することによりジャム処理を実行させている(S10)。このため、サーマルシャットダウン回路の動作があったことが、一般的なモータドライバICを利用した場合でも簡単な構成により判断できる。
(もっと読む)
負荷駆動制御回路
【課題】負荷の接続端子に生じ得る天絡や地絡をより確実に検出することができる負荷駆動制御回路を提供する。
【解決手段】各々のブリッジ回路5〜7にブリッジ状の抵抗群(抵抗18,19、抵抗22,23、抵抗26,27)を取り付けて、これらに電源Vccの電圧を印加する。そして、モータM1,M2の回転状態を停止と回転(正転、逆転)との間で切り換えるに際に、ブリッジ回路5〜7のブリッジ出力を一旦、全てハイインピーダンス状態にして、この時の抵抗群とブリッジ出力間から取り出した中間電圧Vv,Vh,Vcom変化を見ることで、モータM1,M2の出力ショート(天絡及び地絡)有無を判定する。
(もっと読む)
モータ制御装置
【課題】モータの位相制御に異常が生じた場合に異常の内容を把握する。
【解決手段】モータ制御装置100aを、互いの相対位相を変更可能な外周側回転子と内周側回転子を備えるモータ1と、相対位相に係る通電指令に応じて流体圧を制御する油圧制御装置13を具備する位相変更手段と、相対位相に係る実位相値を取得すると共に、通電指令に応じた相対位相に係る目標位相値と実位相値との差に基づき、油圧制御装置13の異常の有無を判定するフェール判定制御部67とを備えて構成した。
(もっと読む)
サーボモータシステム
【課題】サーボモータ12等に故障が生じていない場合に容易に復帰させる。
【解決手段】起動時にエアミックスドア6の位置が上限位置よりも上側に位置するときには、ステップS100でYESと判定する。また、ステップS110において、エアミックスドア6の位置が下限位置よりも下側に位置するときにはYESと判定する。ステップS100、S110のいずれかでYESと判定したときには、エアミックスドア6の位置が異常であると判定することになる。このとき、ステップS120に移行して、サーボモータ12を駆動して、エアミックスドア6の位置をポテンショメータ12aの位置検出可能範囲内に戻して、通常制御を実施する。このため、起動前の通常制御でサーボモータ12が故障してないにもかかわらず、ステップS100、S110のいずれかでYESと判定したときでも、その後の起動時に、復帰できる。
(もっと読む)
非常油ポンプのポンプ駆動機構及び駆動ポンプ切換方法
【課題】容易に入手可能な機器を使用して、非常油ポンプを滑らかに起動することができる非常油ポンプのポンプ駆動機構を提供する。
【解決手段】停電時に非常電源50を用いて回転機械に潤滑油を供給する非常油ポンプのポンプ駆動機構において、非常油ポンプの非常電動機23aが非常電源50からインバータを介して給電を受ける交流電動機とされ、インバータとしてEOP常用インバータ31及び予備インバータ35が設けられている。
(もっと読む)
モータ制御装置
【課題】
上位制御部と下位制御部とを有して成るモータ制御装置において、異常発生時、両制御部間での誤認識や誤受信を防止し、認識遅れやモータの運転停止動作の遅れをなくす。
【解決手段】
モータ制御装置として、上位の第1の制御部と下位の第2の制御部との間でシリアル通信を行うとともに、異常発生時は、第2の制御部から第1の制御部に向かってアラーム信号を送信し、該第1の制御部が、シリアル通信による該第2の制御部からの信号の変化情報と、上記アラーム信号とに基づき、該第2の制御部におけるモータ駆動用の駆動信号の形成を停止させるための信号を形成し、シリアル通信によって該第2の制御部側に出力する構成とする。
(もっと読む)
2重系モータ制御装置
【課題】フォースファイト状態から故障の判定を可能にする2重系モータ制御装置の提供。
【解決手段】フォースファイト状態においては、モータ9a及び9bにおいて互いに逆方向のトルクを発生しているので、ドライバ7a及び7bには大きさが等しく逆極性のモータ駆動コマンドIV1及びIV2がそれぞれ印加される。故障判定部6a,6bにおいて、モータ駆動コマンドIV1とIV2とを比較することにより、フォースファイト状態の発生を判定できる。フォースファイトが電流センサ8aのバイアス的誤差に起因するのであれば、電流コマンドIC1とモータ駆動コマンドIV1とは逆極性であり、電流コマンドIC2とモータ駆動コマンドIV2は同極性である。故障判定部6a,6bにおいて、電流コマンドとモータ駆動コマンドの極性が同一であれば、該制御ユニットは正常であり、逆であれば故障ありと判定できる。
(もっと読む)
ファンモータ駆動制御装置
【課題】 ファンモータが複数台動作している場合において、その一部のファンモータが故障停止したときであっても、空冷能力の低下を抑えて熱暴走等を防止し、ひいては空冷機能の信頼性を向上させることが可能なファンモータ駆動制御装置を提供することにある。
【解決手段】 ファンモータを駆動する駆動回路11,12と、駆動回路11,12に対してファンモータの回転数を切り替える制御信号を送信する回転数切替制御回路13と、を有するファンモータ駆動制御装置10であって、回転数切替制御回路13は、駆動回路11,12に設けられ、駆動対象となっているファンモータFM1,FM2の停止を検出する停止検出端子(RD端子)から受信する信号に基づき、上述の制御信号を送信することを特徴とする。
(もっと読む)
自己診断を行うHVACゾーン構成
電流の流れが過大になったときにトリップする保護装置を介して複数の駆動モータが電源に接続されている駆動回路において、障害発生時点でどの回路がアクティブであったかを検出する。様々な回路のそれぞれの起動を制御するために、また障害発生時点でどの回路がアクティブであったかを検知するためにマイクロプロセッサが設けられる。適正な診断および修復の処置を実行することができるように、適切な信号がマイクロプロセッサからユーザインタフェースに送られる。  (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]