
Fターム[5H680FF37]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 電源回路 (889) | 非正弦波 (269)
Fターム[5H680FF37]の下位に属するFターム
矩形波、パルス (214)
Fターム[5H680FF37]に分類される特許
1 - 20 / 55
駆動機構及びレンズユニット
【課題】アクチュエータの駆動軸と係合した弾性部材のバネ力量のバラツキを小さくできる駆動機構及びレンズユニットを提供する。
【解決手段】駆動機構は、アクチュエータ4、係合部材とを備えている。係合部材は、弾性部材6と、被駆動部材を保持する筒体7とを備えている。弾性部材6は、筒体7を保持した弾性を有する筒体保持部と、筒体保持部の第1端に配設された第1挟持部61と、筒体保持部の第2端に配設された第2挟持部62とを備えている。筒体保持部は、筒体7の外周を巻回するように配設されて筒体保持部の弾性力によって筒体7の外周を保持する。
(もっと読む)
圧電アクチュエーター、及び、圧電アクチュエーターの駆動方法

【課題】エネルギー効率の改善及び構成の簡素化を図る。
【解決手段】圧電素子を有し、駆動信号が圧電素子に供給されることによって振動する振動体であって、長辺方向の長さと短辺方向の長さとの比が略n対1(nは2以上の整数)の矩形の平面形状の振動体と、振動体に設けられた当接部であって、振動体の振動に応じて被駆動体に当接する当接部と、を備え、振動体を第1周波数で矩形の長辺方向へ伸縮させる第1振動、及び、振動体を第1周波数とは異なる第2周波数で矩形の短辺方向へ伸縮させる第2振動、を駆動信号によって発生し、第1振動及び第2振動に基づいて、当接部を被駆動体に当接させて被駆動体を駆動する。
(もっと読む)
慣性駆動アクチュエータ
【課題】 簡単かつ低コストな構成でありながら、摩耗等の影響が少なく、長期に亘って安定して移動体を移動駆動することができる慣性駆動アクチュエータを提供する。
【解決手段】 本発明に係る慣性駆動アクチュエータは、第1の方向または第2の方向への変位を発生する第1の変位手段(1)と、前記第1の変位手段(1)の変位によって往復運動される振動基板(4)と、前記振動基板(4)の平面上に配置され、該振動基板(4)の平面に直交する第3の方向に変位を発生する第2の変位手段(2)を有する移動体(20)と、を備え、前記第2の変位手段(2)を介して前記移動体(20)を第3の方向に変位させて前記振動基板(4)と前記移動体(20)との間の摩擦力を制御する摩擦力制御手段とを有する。
(もっと読む)
圧電モータ
【課題】、簡易な構成で、直動駆動と回転駆動とを選択的に行うことができる圧電モータを提供すること。
【解決手段】略直方体形状の圧電素子である振動子13の振動を利用してシャフト11を駆動する圧電モータを次のように構成する。シャフト11に対向する矩形面の長辺方向が伸縮方向であり、且つ、前記矩形面の短辺方向に並列配置された少なくとも2つの圧電活性領域を備える振動子13と、前記振動子13の長手方向における一方端部を保持し、該一方端部と前記シャフト11との相対位置を固定する保持部15と、前記振動子13の長手方向における他方端部に設けられ、前記シャフト11と接触する摩擦接触部材19と、前記摩擦接触部材19が前記シャフト11に加圧接触するように前記振動子13を押圧する押圧部材17と、を圧電モータに具備させる。
(もっと読む)
アクチュエータ装置
【課題】動作特性が安定し、高速での駆動が可能なアクチュエータ装置を得る。
【解決手段】ベース板10と、加圧板15と、平板状の圧電素子20A,20Bと、圧電素子20A,20Bの一端部の表面に貼着された摩擦板30A,30Bと、圧電素子20Bの他端部裏面側に取り付けた重り40と、ベース板10と加圧板15との間に介在されたスペーサ36と、を備えたアクチュエータ装置。摩擦板30A,30Bの表面には微小突部が圧電素子20A,20Bの伸縮方向と直交する方向に形成される。この微小突部によって摩擦板30Aと加圧板15との摩擦接触及び摩擦板30Bとベース板10との摩擦接触が安定する。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
アクチュエータ装置
【課題】コンパクトで薄型であり、かつ、変位部材に作用する加圧力の変動の小さいアクチュエータ装置を得る。
【解決手段】ベース板10と、加圧板15と、平板状の圧電素子20A,20Bと、該圧電素子20A,20Bの間に挿入された補強板25と、圧電素子20A,20Bの一端部の表面に貼着された摩擦板30A,30Bと、圧電素子20A,20Bの他端部に取り付けた重り35とで構成されている。加圧板15は圧電素子20A,20Bが変位する方向Y,−Yに延在する、剛性力が加圧板15の他の領域よりも小さい低剛性領域15aを有し、主として該低剛性領域15aによって圧電素子20A,20Bに弾性力が付与されている。
(もっと読む)
対象物の位置検出装置、光学構造、携帯端末、及び、対象物の位置検出方法
【課題】電子機器の小型化、薄型化、省コスト化に対応するとともに、レンズの位置制御が効率的に行える光学構造を提供する。
【解決手段】カメラ装置10の光学構造は、圧電素子18に第2電気信号を入力し、この第2電気信号に基づいて圧電素子18にて第2振動信号を発生させる。また、光学系制御部20は、圧電素子18に出力した第2電気信号と、第2振動信号がレンズマウント14aで反射した第3振動信号である反射波信号40aが圧電素子18で変換された第3電気信号と、に基づいて、圧電素子18に対するレンズ14の位置を検出する。この検出位置に基づき、圧電素子18からの第1振動信号によって、レンズ14がフォーカス位置に移動され、オートフォーカス制御が実行される。
(もっと読む)
アクチュエータの駆動回路およびそれを用いる超音波リニアアクチュエータ
【課題】圧電素子の伸縮を駆動部材に伝え、その駆動部材に所定の摩擦力で係合している被駆動部材を圧電素子の伸張時と縮小時との速度差を利用して移動させる超音波リニアアクチュエータの駆動回路において、低コストに、起動時などにおける騒音を抑える。
【解決手段】前記の速度差を生じさせる擬似鋸歯状の変位振動を、駆動周波数およびデューティを適宜設定することで、Hブリッジ回路によるパルスで作成できるようにし、さらにそのパルスを、起動時、停止時、間欠駆動時には、微細パルスで構成して、パルス密度を徐々に増減させることで、実質的に前記パルスの幅を変化し、圧電素子への充放電電流を抑えて騒音を低減する。これによって、駆動回路を、前記Hブリッジ回路などの従来通りの圧電素子の充放電回路と、その制御回路とによって構成することができ、制御回路が作成するパルスの態様を変化するだけで、低コストに実現することができる。
(もっと読む)
回転駆動装置
【課題】小型で軽量の回転駆動装置の提供。
【解決手段】フレクスプライン12の半径方向内方において、ピエゾロータ14が回転可能に設けられている。ピエゾロータ14の長尺状の押圧部14bにより、フレクスプライン12を半径方向外方に押圧し、フレクスプライン12のアウタティース12aとサーキュラスプライン11のインナティース11cとを噛合させる。ピエゾロータ14には、撓み可能な可動部14cが形成され、可動部14cに取り付けられた圧電素子16に電圧を加えて反復的に歪を発生させる。これにより、可動部14cが繰返し加速度をともなって変形するため、ピエゾロータ14に継続的に慣性力が発生して回転する。ピエゾロータ14の回転により、アウタティース12aとインナティース11cとが噛合する円周上の位置が移動し、フレクスプライン12において、ピエゾロータ14による回転が減速されて出力される。
(もっと読む)
駆動装置、レンズユニット、カメラモジュール
【課題】より小型化に適した駆動装置を提供する。
【解決手段】駆動装置は、固定された支持軸44と、支持軸44に対して摺動可能に設けられたスライダ42と、駆動電圧に応じて伸縮変形する圧電素子43と、を備える。圧電素子43はスライダ42に取り付けられている。圧電素子43の伸縮方向はスライダ42の移動方向と平行であり、圧電素子43は、スライダ42の面のうち移動方向に対して垂直な端面423に取り付けられている。また、圧電素子と支持軸との距離は近いことが好ましく、例えば、圧電素子と支持軸との距離は支軸軸の軸径の2倍以下とする。
(もっと読む)
振動アクチュエータ、レンズ鏡筒および撮像装置
【課題】小型で効率的な交互送り振動アクチュエータを提供する。
【解決手段】移動対象に当接する先端部、および、移動対象に近接離間する縦方向に伸縮する電気機械変換素子をそれぞれ有する一対の縦駆動部と、一対の縦駆動部を縦方向に交差する横方向に並べて弾性的に支持する支持部と、一対の縦駆動部の間に挟まれ、横方向に伸縮する電気機械変換素子を有する横駆動部とを備える振動アクチュエータが提供される。横駆動部は、支持部により支持される一対の縦駆動部の支持位置に対して前記先端部と反対側で一対の縦駆動部に挟まれてもよい。
(もっと読む)
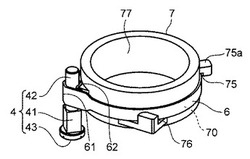
電気機械式モーター
電気機械式モーター(10)は、アクチュエーターアセンブリ(12)と、駆動方向(4)に駆動される物体(14)とを有している。アクチュエーターアセンブリ(12)は、アクチュエーター基台(16)と、第一アクチュエーター(20)と第二アクチュエーター(22)とを有している。アクチュエーター(20、22)は、夫々の単一取付部(24、26)によりアクチュエーター基台(16)に、アクチュエーター(20,22)の第一端(25,27)に機械的に取付られている。アクチュエーター(20,22)は、駆動方向(4)と交差するアクチュエーター方向(5)に見て該第一端(25,27)と反対側の第二端(31,33)を成す相互作用部(30,3)を夫々有している。相互作用部(30,32)は、夫々の接触エリヤ(34,35)において、該物体(14)の相互作用面(13)と相互作用するように配置されている。アクチュエーター(20,22)は、夫々への電気信号の反応として夫々の接触エリヤ(34,35)の運動(6,7)を起こさせるようにされたユニモルフ部材(36,38)を有している。それぞれの運動(6,7)は、アクチュエーター方向(5)、駆動方向(4)及び互いに交差している。 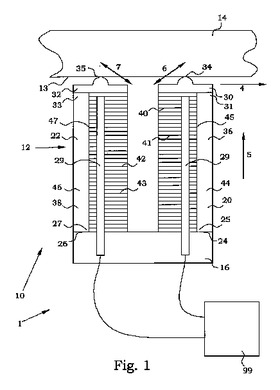 (もっと読む)
(もっと読む)
駆動装置、レンズ部品、及びカメラモジュール
【課題】圧電素子の伸縮により生じる振動を効率的に移動対象物の変位へ変換すること。
【解決手段】駆動装置は、ピエゾ素子42と伝達軸44とが連結した連結体と、伝達軸44の長手方向に摺動可能な状態で伝達軸44が係合した固定側部材と、少なくともショアD60以上の硬度の接着剤43を介して、伝達軸44が固着したレンズホルダ31と、を備える。レンズホルダ31は、レンズL1、L2を保持する。ピエゾ素子42の伸縮により生じる振動を従来よりも効率的にレンズホルダ31の変位へ変換することができる。
(もっと読む)
駆動装置、画像取得装置、及び電子機器
【課題】駆動装置が組み込まれる装置の小型化を図ること。
【解決手段】ピエゾ素子42の駆動に応じて所定の軸線に沿って一方及び他方へレンズホルダ31を変位させる駆動装置であって、ピエゾ素子42に対して伝達軸44が連結した連結体と、伝達軸44の長手方向に沿って伝達軸44が摺動可能な状態で伝達軸44を保持する筐体20と、を備える。連結体は、少なくともレンズホルダ31の移動方向の一方側へレンズホルダ31よりも突出していない状態で、レンズホルダ31に対して固定されている。連結体は、レンズホルダ31の移動方向の他方側へレンズホルダ31よりも突出していない状態で、レンズホルダ31に対して固定されている、と良い。
(もっと読む)
駆動装置
【課題】被駆動部材を効率よく移動させ、低背化を図ること。
【解決手段】駆動装置(20)は、伸縮方向で互いに対向する一対の端面(441a,441b)を持つ電気機械変換素子(441)と、この電気機械変換素子の一対の端面の一方(441b)に取り付けられた振動摩擦部(443)と、この振動摩擦部と摩擦結合される被駆動部材(423)と、振動摩擦部と被駆動部材との間に摩擦力を発生させる摩擦力付加手段(424)とを備え、電気機械変換素子の伸縮方向に被駆動部材が移動可能である。振動摩擦部(443)は、伸縮方向と直交する方向に第1の端面(4431)としての摩擦面を持つ。被駆動部材は、振動摩擦部の摩擦面と摺接する棒状の移動軸(423)を含む。摩擦力付加手段(424)は、振動摩擦部(443)以外の部材(422)に取り付けられている。
(もっと読む)
球面モータ
【課題】圧電素子を駆動源として用いて新規なメカニズムにより動作する球面モータを提供する。
【解決手段】ベース12の表面には4個の支持台14が円周方向に均等角度間隔に固定配置されている。各支持台14には圧電素子11がそれぞれ収容されている。各圧電素子11は電圧の印加により長手方向に伸長する。各支持台14の上部には凹所16がそれぞれ形成されている。凹所16には円柱状のローラ18が上下方向に移動自在にそれぞれ横倒しで収容されている。ローラ18は圧電素子11の上に載置支持されている。4個のローラ18上には大球20の下面が四点支持されている。大球20は板ばね30、小球48,スライド棒38、コイルスプリング46等で構成された弾性押圧部材により上側から支持されている。各圧電素子11は矩形波、のこぎり波等により選択的に駆動される。
(もっと読む)
圧電アクチュエータ
【課題】平行配置された2つの圧電素子に接続された梁状本体部に形成された柱状突起の先端に楕円運動を生起させることで駆動対象に送りを掛けるようにした圧電アクチュエータの動作効率を向上させる。
【解決手段】第1,第2の圧電素子PZT1,PZT2の先端に固着された梁状本体部5の中央から左右に等しい間隔をおいて同一形状同一寸法の2つの柱状突起6,7を設けると共に、梁状本体部5の中央部には柱状突起6,7と逆方向に向けて突出する中央支持体8を設け、第1,第2の圧電素子PZT1,PZT2および中央支持体8の基部をベースプレート11に固着し、何れかの圧電素子を正弦波または三角波からなる高速送り用駆動信号で駆動することにより、柱状突起6,7の先端に位相の異なる楕円運動を生起させ、圧電素子の1振動周期の内に柱状突起6,7を利用して2回の送り動作をかける。
(もっと読む)
駆動装置およびそれを備えた電子機器
【課題】摩擦係合部材と被駆動体との間で作用する摩擦力が安定であり、かつ、与圧がかけられた状態であっても被駆動体の駆動速度を安定にすることができる駆動装置を実現する。
【解決手段】本発明の駆動装置は、屈曲変位部材1と、被駆動体3と摩擦係合し、被駆動体3を、屈曲変位部材1における固定端Oと自由端O’とを結ぶ直線方向に駆動させる摩擦係合部材2と、摩擦係合部材2と被駆動体3とを一定の力で押し付けるための予圧機構とを備え、屈曲変位部材1の固定端Oと被駆動体3とを最短で結ぶ仮想線Lと被駆動体3との交点を交点Lcとし、屈曲変位部材1の自由端O’と被駆動体3とを最短で結ぶ仮想線L’と被駆動体3との交点を交点Lc’としたとき、摩擦係合部材2における被駆動体3との接触部21は、交点Lcと交点Lc’とを結んだ仮想線LcLc’上に位置するとともに、交点Lc’よりも交点Lcに近い位置に配されている。
(もっと読む)
慣性駆動アクチュエータ
【課題】移動体の全移動範囲に渡って、正確な位置検出を行うことのできる慣性駆動アクチュエータを提供する。
【解決手段】固定部材と、固定部材に接続され、第1及び第2の方向とに微小変位を発生する変位発生手段と、変位発生手段が発生した微小変位によって往復運動する振動基板と、振動基板上に配置され、慣性に基づく移動が可能な移動体と、移動体に接続され、電流印加によって、移動体に電磁気力を作用させることによって、移動体と振動基板との間の摩擦力を制御する駆動手段と、振動基板の平面上に、移動体と絶縁体層を介して対向配置され、かつ、移動体の移動に伴い移動体との対向面積が連続的に増加もしくは連続的に減少するように形成された、位置検出機能を備える検出電極と、移動体と検出電極との間の静電容量を検出することによって、移動体の位置を検出する位置検出手段と、を具備する。
(もっと読む)
1 - 20 / 55
[ Back to top ]