
Fターム[5J021HA03]の内容
可変指向性アンテナ、アンテナ配列 (29,192) | アンテナ装置の応用 (4,110) | 追尾 (117)
Fターム[5J021HA03]に分類される特許
21 - 40 / 117
ビームを形成するための方法及び装置
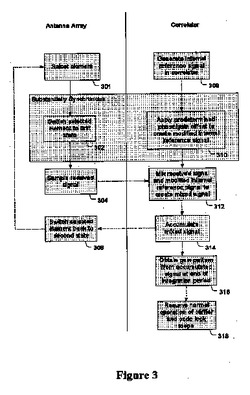
アンテナ配列のビームを形成するためのデバイス。デバイスは、複数の空間的に分散された素子を有するアンテナ配列と、第1及び第2の状態の間で素子を選択的に切り換えるためのプロセッサであって、第1の状態では、素子が着信信号を受信するように構成されるプロセッサと、アンテナ配列と作動的に関連付けられ、かつ基準信号を生成し、混合信号を生成するために着信信号を修正された基準信号と混合し、かつ累積信号を生成するために所定の期間にわたって混合信号を合計するためにプロセッサと作動的に関連付けられた受信機であって、基準信号が、累積信号がアンテナ配列のビームの方向及び大きさを示すことができるように受信信号と混合される前に修正される受信機とを含む。 (もっと読む)
自己安定化アンテナベース

【課題】自動安定化および位置決め制御のためのシステムを有するアンテナ装置(18)を提供すること。
【解決手段】このアンテナ装置は、微小電気機械(MEMS)ベースの加速度計およびジャイロスコープ集積回路(IC)センサ(26)を、ビークル搭載アンテナ用途でのアンテナベース(20)内に直接組み込む。これらのセンサは、外部センサ入力を必要とせずに、ビークルの動きと無関係に所望のビーム掃引範囲を達成するように、アンテナ装置が自動的にアンテナ(22)を安定化することを可能にする。本発明は、外部に取り付けられた方位センサへの通信インターフェースを不要にし、ケーブルI/Oを削減し、設置手順を容易にする。
(もっと読む)
指向性アンテナ装置
【課題】従来のものより低コストで信号送出源から送出される電波信号を追尾することができる指向性アンテナ装置を提供すること。
【解決手段】移動体2上でAZ軸回りに回転可能に支持されたAZフレーム3と、AZフレーム3上でVDX軸回りに回転可能に支持されたVDXフレーム4と、VDX軸に対して直交仰角軸が一定角度をなすようVDXフレーム4に設けられたXプラットフォーム5と、VDXフレーム4上でY軸回りに回転可能に支持されたYフレーム6と、Yフレーム6に支持された指向性アンテナ7とを備え、Xプラットフォーム5のXXP軸回りの傾斜を略零に維持すると共に、指向性アンテナ7の仰角を信号送出源に対する仰角に等しくなるよう維持した上で、VDXフレーム4を摂動させながら、指向性アンテナ7の方位をRSSに基づいて調整する。
(もっと読む)
アンテナ駆動制御方法、アンテナ駆動制御プログラム及びアンテナ駆動制御装置
【課題】 手動による設定を不要とし、確実かつ正確にアンテナを指向させる。
【解決手段】 電源立上げ時またはリセット時には、駆動制御部11が、通信衛星の仰角を算出し、算出した衛星仰角にアンテナ2の仰角を一致させるようにアンテナ2を回転変位させ、アンテナ2の方位角が変化するようにアンテナ2を回転変位させて、受信したビーコン波の電界強度が最大のアンテナ2の角度位置を探索し、アンテナ基準位置から最大受信電界強度の角度位置までの回転角を求め、回転角と衛星方位角との差から基準船首角を求める。
(もっと読む)
アンテナ駆動装置
【課題】
従来のアンテナ駆動装置は、駆動力を90度変換するのにかさ歯車やハイポイドギアを用いるため、取り付け位置の調整が難しく、構造が複雑でコストが高くなるという問題があった。
【解決手段】
本発明は、アンテナと、前記アンテナを方位方向に回動させる方位方向駆動部と、前記アンテナを仰角方向に回動させる仰角方向駆動部とを備え、前記仰角方向駆動部は、仰角駆動用モータの動力を方位方向回転軸に伝える仰角第1駆動部と、前記仰角第1駆動部の動力を90度変換して仰角方向回転軸に伝える仰角第2駆動部とからなり、前記仰角第2駆動部は、前記仰角第1駆動部に連結する駆動プーリと、前記アンテナに連結する従動プーリと、前記駆動プーリと前記従動プーリを掛け回すベルトとからなり、前記ベルトは、前記駆動プーリと前記従動プーリをミュール掛けする。
(もっと読む)
アンテナシステム
【課題】製造コストの高騰を抑えつつ、天候に左右されることなく通信用アンテナの設置位置や指向方向を高精度で調整し得るアンテナシステムを提供する。
【解決手段】指向性を有する通信用アンテナ24と、通信用アンテナ24の設置位置を調整する調整機構と、調整機構を制御して設置位置を調整させる制御装置と、GPS信号に基づいて現在位置を測位するGPS測位部と、通信用アンテナ24の基準設置位置を特定可能な基準設置位置情報を記憶する記憶部とを備え、制御装置は、GPS測位部によって測位された現在位置Pa1と基準設置位置情報に基づいて特定した基準設置位置P0aとの位置ずれ量を取得するずれ量取得処理を実行すると共に、位置ずれ量が規定量を超えているときに、調整機構を制御して通信用アンテナ24を基準設置位置P0aに向けて移動させる位置調整処理を実行させる。
(もっと読む)
アンテナ方向制御装置及びアンテナ方向制御方法
【課題】高速にアンテナの方位方向を電波の発信源の方向に一致させるとともに、方向制御の精度も高めることを可能とすること。
【解決手段】アンテナ方向制御装置であって、基準値を記憶する基準値記憶部と、左右に配置されたアンテナ素子によるそれぞれの受信信号の信号強度の差分を算出し、基準値と差分との差がゼロに近づくようにアンテナ部の方向を制御する第一方向制御部と、左右の受信信号の合成信号が最大となるようにアンテナ部の方向を制御する第二方向制御部と、第二方向制御部によって方向が制御された時点の、左右の信号強度の差分を算出し、算出された差分を基準値記憶部に基準値として上書きする基準値修正部と、第二方向制御部の動作頻度が第一方向制御部の動作頻度よりも少なくなるように、第二方向制御部の動作タイミングを制御するタイミング制御部と、を備える。
(もっと読む)
追尾アンテナ
【課題】3つの高トルクのモータを使用することなく、ジンバルロックを回避できる追尾アンテナを提供する。
【解決手段】方位角軸、仰角軸、直交仰角軸において、直交仰角軸周りの指向方向は、給電部の物理的位置を移動させる物理的手法、もしくは、給電部を構成する素子アンテナを複数設け、適切な振幅および位相分布で励振する電気的方法で、比較的限定された範囲で制御する。
(もっと読む)
自動追尾受信方法及び自動追尾受信機
【課題】一つのパラボラアンテナ内に設置した複数の追尾輻射器の受信電界レベルが検波電圧の比較に必要な電界レベルより低くても自動追尾可能とする。
【解決手段】二つの追尾輻射器(右)3aと追尾輻射器(左)3bで受信した信号を、移相器(右)4aと移相器(左)4bを通して合成器5aで合成し、その合成信号を検波器6aで検波して得た検波値が最大になるように移相器(右)4aと移相器(左)4bの移相量を可変するようにしているため、同条件で片方の追尾輻射器が出力する信号を検波する場合と比較して、約二倍の大きさの信号に基づく検波が可能になる。そのため、二つの追尾輻射器を交互に切り替えながら、一つの追尾輻射器の出力信号で電波到来方向を推定する方式と比較し、約半分の強さの受信電界レベルの電波でも自動追尾受信が可能である。
(もっと読む)
指向性アンテナ装置
【課題】従来のものより低コストで信号送出源から送出される電波信号を追尾することができる指向性アンテナ装置を提供すること。
【解決手段】移動体2上で上方に延びるAZ軸回りに回転可能に支持されたAZフレーム3と、AZフレーム3上で直交仰角軸(X軸)回りに回転可能に支持されたXプラットフォーム4と、Xプラットフォーム4上で仰角軸(Y軸)回りに回転可能に支持されたYフレーム5と、Yフレーム5に支持された指向性アンテナ6とを備え、Xプラットフォーム4の直交仰角軸回りの傾斜を略零に維持すると共に、指向性アンテナ6の仰角を信号送出源に対する仰角に等しくなるよう維持した上で、角速度計7によって検出された角速度を基に得られたXプラットフォーム4の方位の角速度ωΨ.XP.detに基づいて、指向性アンテナ6の方位をRSSに基づいてサーチして微調整した方位に追従させる。
(もっと読む)
電波到来方向推定装置及び無線システム
【課題】反射波のある環境で正しい電波到来方向の推定値を得ることができる電波到来方向推定装置及びそれを備えた無線システムを提供する。
【解決手段】指向性制御部30を介して可変指向性アンテナ10の指向性を所定の種類の指向性に変化させ、指向性を変化させたときの受信電力を受信電力検出部20で検出し、受信電力格納メモリ60に格納する。そして、変化させた所定の種類の各指向性において、基準受信電力格納メモリ40に格納された基準電力値と受信電力格納メモリ60に格納させた受信電力値との相関係数を算出し、算出した相関係数のうち最大相関係数に対応する角度を算出し、算出した最大相関係数と予め定めておいた相関係数の比較値とを比較し、最大相関係数が比較値よりも大きかった場合には最大相関係数に対応する角度を推定角度とし、最大相関係数が比較値以下であった場合には最大相関係数に対応する角度を推定角度としないようにする。
(もっと読む)
無線タグ回路素子
【課題】設置対象物が金属物であっても確実に広い指向性範囲を実現し、良好な情報送受信を行う。
【解決手段】情報を記憶するIC回路部150と、情報を送受信するタグアンテナANT2とを有し、設置対象物110に取り付けられる無線タグ回路素子T2であって、タグアンテナANT2は、隣り合う面同士が互いに略直交して連接するように設けられた3つ以上の誘電体の基板面101a,101b,101cからなり、設置対象物110の頂点を覆うように設けられた誘電基板体101と、この誘電基板体101のうち、設置対象物110を覆う側と反対側に形成され、IC回路部150に接続される給電点Psを備えたマイクロストリップアンテナパターン105とを有するマイクロストリップアンテナである。
(もっと読む)
信号到来方向推定装置
【課題】簡単な処理で無線信号の到来方向を推定することを目的とする。
【解決手段】複数の単位アンテナを備え、各単位アンテナで受信された信号に基づいて、無線信号の到来方向角を推定する信号到来方向推定装置において、各単位アンテナで受信された信号の値をベクトル要素とした受信ベクトルを求める受信ベクトル生成処理と、複数の単位アンテナの総合指向方向を示す総合指向性変数についての指向性関数をベクトル要素とし、指向性ベクトルを生成する指向性ベクトル生成処理と、受信ベクトルと、指向性ベクトルとの内積を求めるベクトル演算処理と、総合指向性変数を変化させつつ内積の大きさを検出する検出処理と、検出処理による検出値が極大となるときの総合指向性変数の値を、推定到来方向角として求める到来方向推定処理とを実行することを特徴とする。
(もっと読む)
指向性アンテナ装置
【課題】従来のものより低コストで信号送出源から送出される電波信号を追尾することができる指向性アンテナ装置を提供すること。
【解決手段】移動体2上で上方に延びるAZ軸回りに回転可能に支持されたAZフレーム3と、AZフレーム3上で直交仰角軸(X軸)回りに回転可能に支持されたXプラットフォーム4と、Xプラットフォーム4上で仰角軸(Y軸)回りに回転可能に支持されたYフレーム5と、Yフレーム5に支持された指向性アンテナ6とを備え、Xプラットフォーム4の直交仰角軸回りの傾斜を零に維持すると共に、指向性アンテナ6の仰角を信号送出源に対する仰角に等しくなるよう維持した上で、角速度計7によって検出されたXプラットフォーム4の直交座標軸(Zxp軸)回りの角速度ωz.XP.detに基づいて、指向性アンテナ6の方位をRSSに基づいてサーチして微調整した方位に追従させる。
(もっと読む)
センサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システム
【課題】微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
(もっと読む)
電波方向検出器およびアンテナ可動装置
【課題】電波到来方向を検知することにより、アンテナの向きを最適な方向にして受信効率を向上させる電波方向検出器およびアンテナ可動装置を提供する。
【解決手段】最頂部から各端部に向かって傾斜する形状を有し、傾斜する表面から底面方向に、所望の電波が到来する方向を検出する孔である電波方向検出管路を異なる角度に複数貫設し、電波方向検出管路の内壁面に電波吸収媒体を塗布した電波方向検出部と、電波方向検出管路を通過した所望の電波を電気信号に変換する電波方向検出管路ごとに対応して電波方向検出部の底面下部に設けられた電磁波−電気変換器を複数備える変換部と、変換部から転送される電波方向検出管路に対応する電気信号のレベルをそれぞれ比較して予め設定した条件に一致した電波方向検出管路の角度方向を電波の到来方向に決定する演算部と、を備える電波方向検出器である。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、空間安定動作のドリフトによって移動局アンテナの視軸線がずれてしまうことを防止するために、前記ドリフトが極めて小さい高価なジャイロを使用する必要があった。
【解決手段】本発明による空間安定装置は、画像処理手段8が、カメラ4の撮影画像4aから画像処理によりターゲット10を抽出し、前記撮影画像4a内における前記ターゲット10の移動量を検出することで空間安定動作のドリフト量を検出し、前記ドリフト量をキャンセルするための補正指令信号8aを回転駆動台2の駆動部5に入力するように構成されている。
(もっと読む)
アンテナ装置及びアンテナの制御方法
【課題】環境変化があっても、空中線駆動の最適化を図り得るアンテナ装置を提供する。
【解決手段】衛星に対するアンテナ部1の指向時に、アンテナ部1の各動作軸の動作速度をAZ角度センサ12、EL角度センサ13及びPOL角度センサ14により検出し、これら検出結果からアンテナ部1の周囲の環境変化による速度誤差を演算処理部11で求め、この速度誤差を小さくするべくアンテナ駆動装置2のAZ軸、EL軸及びPOL軸の各駆動モータを制御し、当該速度誤差が予め設定されたしきい値未満となった場合に、AZ軸、EL軸及びPOL軸の各駆動モータに対する速度制御を停止する。
(もっと読む)
方向測定装置
【課題】円形配列のアレイアンテナに適用でき、複数の相関のあるマルチパス波の到来方向が接近している場合に正確に到来方向を測定できる方向測定装置を提供する。
【解決手段】マルチパス波があると判定した場合、受信波を混信分離して混合ベクトルを算出し、この混合ベクトルにステアリングベクトルの共役転置を乗算する。この積の複素平面上におけるベクトルとしての軌跡からマルチパス波の中心的方向を測定する。複素平面上でのこの積の軌跡が楕円、円、直線のいずれかに最も近くなった場合、乗算したステアリングベクトルに対応する方向を中心的方向と判定する。
(もっと読む)
基地局アンテナ制御システム、基地局アンテナ制御装置、移動局アンテナ制御装置及びアンテナ制御方法
【課題】移動局アンテナと基地局アンテナとの間での通信を、天候状態に合わせて好適に行うことが可能な、新規かつ改良された基地局アンテナ制御装置、移動局アンテナ制御装置及びアンテナ制御方法を提供すること。
【解決手段】処理部150は、位置情報取得装置180が取得した位置情報の入力を受け付けるとともに、天候情報取得装置190が取得した天候情報の入力を受け付ける。処理部150は、処理部150は、入力を受け付けた位置情報及び天候情報を検索キーとして、アンテナ制御情報170から属性情報を検索する。処理部150は、検索して得られた属性情報に基づいて、アンテナ制御部120を介して、基地局アンテナ110を制御する。
(もっと読む)
21 - 40 / 117
[ Back to top ]