
Fターム[5J070AB16]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | 連続波(CW) (917) | 振幅変調(AM−CW) (30)
Fターム[5J070AB16]に分類される特許
21 - 30 / 30
計器着陸システムの望ましくない信号を除去する方法及びシステム
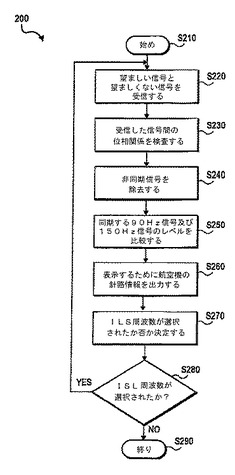
【課題】 航空誘導システムにおいて望ましくない信号を除去する。
【解決手段】
航空誘導システムにおいて望ましくない信号を除去する方法は、振幅変調の第1の周波数を有する、少なくとも1つの第1の望ましい信号を受け取るステップと、振幅変調の第2の周波数を有する、少なくとも1つの第2の望ましい信号を受け取るステップと、前記第1と第2の望ましい信号の少なくとも1つと実質的に同じかあるいはその低調波である周波数を含む任意の周波数を有する少なくとも1つの望ましくない信号を受け取るステップを含む。前記振幅変調の第1と第2の周波数は位相が同期しており、前記望ましくない信号は前記第1と第2の望ましい信号の少なくとも1つと同期しない。この方法は、前記望ましくない信号を識別するステップと、当該望ましくない信号を除去するステップとも含む。
(もっと読む)
送受信システム,外部発信受信装置,および送受信方法

【課題】無線型伝送装置の存在位置を検知する。
【解決手段】外部発信受信装置10と無線型伝送装置20との間において、情報がやりとりされる。外部発信受信装置10は、搬送波の送信レベルを順次変更する。無線型伝送装置20は、搬送波を受信して駆動し、搬送波を負荷変調して返信信号を送信する。外部発信受信装置10は、無線型伝送装置20からの返信があると、搬送波の送信レベルに基づいて外部発信受信装置10と無線型伝送装置20との間の通信距離を求める。
(もっと読む)
物体検知センサ
【課題】センサの真下付近を含む所定の監視領域に対して物体の位置を精度良く計測することができる物体検知センサを提供すること。
【解決手段】監視領域をセンサ2からの距離に応じて複数の区画11,12,13に分割し、各区画を検知範囲とする複数のアンテナ3,4,5を切り替えて使用し、信号処理回路8において電波レーダの出力情報と電波照射経路とを照合することによって、設置したセンサの真下を含む領域において物体の監視面内での位置及び高さを計測する。
(もっと読む)
両側波帯信号を使用する遠隔検知システムおよび方法
送受信機(102)を含む検知システム(100)が提供される。該送受信機は、第1および第2の周波数成分を有する両側波帯電磁波を送信する送信機チェーンと、標的によって反射された後の両側波帯電磁波を受信する受信機チェーンとを含む。システム(100)は、両側波帯電磁波から情報内容を抽出する基本帯域回路(104)をさらに含む。第1および第2の周波数成分間の分離は、両側波帯電磁波の一方の側波帯によって生成される信号応答内のスパイクを、両側波帯電磁波の他方の側波帯によって生成される信号応答のヌルポイントにほぼ重複させる。 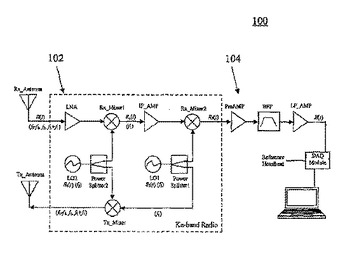 (もっと読む)
(もっと読む)
移動物体検出装置
【課題】簡単な構造で小型化が可能であり、かつ見通し範囲外でも検出可能な移動物体検出装置を提供すること。
【解決手段】移動物体検出装置は、発振回路10、送信アンテナ11、受信アンテナ13、アンプ14、検波回路12、15、16、A/D変換器19、マイクロコンピュータ20を備える。マイクロコンピュータ20は、信号を送信して受信信号値を読み込み、受信信号値が所定のレベル範囲外になった場合に移動物体有りと判定し、表示装置21に表示する。小型化が可能で安価に製作できる。また、マイクロ波や赤外線を使用した装置とは異なり、壁や樹木などの障害物がある見通し範囲外でも移動物体を検出可能であり、検出範囲、検出角度が広い。更に、検出用の信号を使用して情報を伝送するので検出結果を容易に伝送できる。
(もっと読む)
移動体識別装置の質問器
RFIDシステムの高出力を要求される質問器の小形化、軽量化、低価格化を実現するために、信号を伝送するための質問器の電波源又は質問器の電力源を携帯電話や携帯通信機器等の携帯無線端末のそれと共用にする。そのために、応答器に伝送する情報で携帯無線端末の無線周波送信信号を振幅変調する。更に、カプラを使って取り出した無線周波送信信号の一部を使って応答器から返送された無線周波受信信号を同期検波し、応答器からのデータを取り出す。 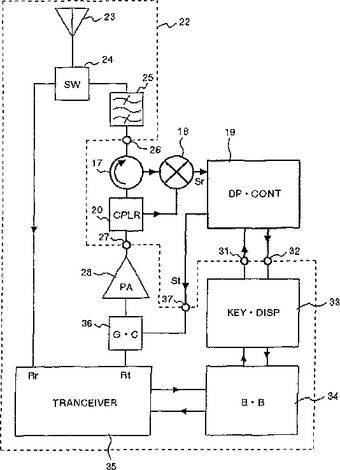 (もっと読む)
(もっと読む)
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得る
ことができるミリ波イメージング装置を提供する。
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像するミリ波帯撮像器C1およびミリ波帯撮像器C2と、ミリ波帯撮像器C1に接続されるアンテナANT1、ミリ波帯撮像器C2に接続され、アンテナANT1からのミリ波の照射方向と同一の照射方向にミリ波を照射し反射したミリ波を受信するアンテナANT2、を有するアンテナ送受信系とを備え、アンテナANT1とアンテナANT2の一方が他方に対し照射方向にオフセットされていることで、ミリ波帯撮像器C1の画像とミリ波帯撮像器C2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得ることができる。
(もっと読む)
自動車用レーダーシステム
レーダーセンサ(10)と、車両の周囲にある対象の距離(D)と相対速度(V)を測定する評価装置(12)と、測定された距離と相対速度を用いて差し迫った衝突を認識して、予測される衝突時点(Tc)と衝突速度(Vc)に関するデータをプリクラッシュシステム(20)へ供給する衝突認識装置(18)とを有する自動車用レーダーシステムは、レーダーセンサ(10)が、衝突認識装置(18)によって速度測定モード(CW)へ切り替え可能であって、速度測定モードにおいて相対速度(V)のより正確な測定が行われることを特徴とする。 (もっと読む)
固定アレイを有するミリ波活性なイメージングシステム
活性なミリ波イメージングシステム(20)は、電磁放射(26,30)を、被検体ポジション(28)の被検体と送受信するよう構成されたアンテナ機器(22)を含む。コントローラ(24)はアンテナ機器(22)を操作し、受信した放射(30)を表す出力(48)を作るよう構成されたトランシーバ(38)、及びトランシーバ出力(48)を被検体の画像を表す画像データ(50)に変換するよう適合されたプロセッサ(40)を含む。アンテナ機器(22)は、被検体の周囲に沿うか被検体に向かうか被検体から離れるように、又は関係するアンテナ機器(22)と反対方向に、部分的又は連続したループ中を移動する。アンテナ機器(82)中のアンテナユニット(94)は、アレイ(98)に沿って異なる角度軌跡に向けられる。アンテナアレイ(582)は、複数のアレイセグメント(592,595,596)からも形成でき、アレイ(582)のグループはアンテナ機器(571)を形成するよう合成もできる。 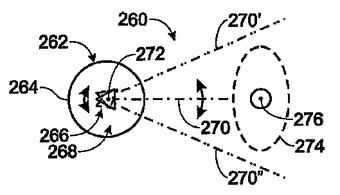 (もっと読む)
(もっと読む)
TDOA分散アンテナを使用したターゲットの位置特定方法及び装置
本発明は、分散アンテナを使用してターゲット(5)の位置を特定するための装置と方法である。アンテナは、既知の位置に設けられた複数の受信要素(4,6,6)からなる。受信要素の少なくとも1つは送信器(4)でもあり、呼掛け信号(7)をターゲット(5)に送信する。ターゲット(5)からの返信信号(8)は複数の受信要素(4,6,6)によって受信され、ターゲットの位置を、返信信号(8)の到達時間及び呼掛け信号(7)の送信と返信信号(8)の受信との間の往復遅延を使用して計算する。 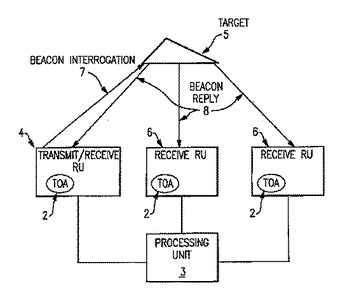 (もっと読む)
(もっと読む)
21 - 30 / 30
[ Back to top ]