
Fターム[5J070BB17]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 追尾モードの切替又は変更 (30)
Fターム[5J070BB17]の下位に属するFターム
アルゴリズムの選択 (7)
Fターム[5J070BB17]に分類される特許
1 - 20 / 23
追尾装置
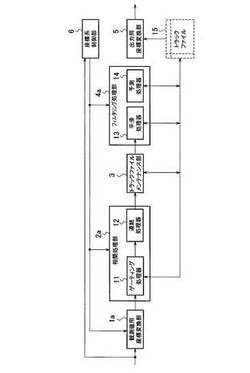
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム

【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
目標追尾処理装置及び目標追尾処理方法
【課題】 設定された航跡モデルを有効、かつ、適切に利用できるようにして、常に高精度で信頼性の高い航跡推定が行えるようにする。
【解決手段】 目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部21と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部21による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニット25(25a〜25n)と、を備える。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
レーダ装置
【課題】高い追尾性能を有する小型かつ安価なレーダ装置を提供する。
【解決手段】目標の予測ゲート内で目標からの反射波を、予測ゲート外で目標からの送信波をそれぞれ受信して電気信号に変換し、受信信号として出力する受信部7と、受信部から出力される予測ゲート内または予測ゲート外の1つ以上の受信信号を用いて目標の角度を測定する測角処理部2と、受信部から出力される予測ゲート内で得られた受信信号を用いて目標までの距離および角度を測定する測距・測角処理部3と、測角処理部で測定された目標の角度を表す測角データと測距・測角処理部で測定された目標までの距離および角度を表す測距・測角データとに基づき目標を追尾する追尾処理を実行するとともに、目標の予測ゲートを生成して受信部に送る追尾処理・制御部10を備える。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
多目標追尾装置
【課題】追尾性能が高く、しかも操作性に優れた小型化可能な多目標追尾装置を提供する。
【解決手段】外部から入力される目標の観測値を用いて複数の目標を追尾する多目標追尾装置において、各目標の状態変数を表す値または相関ゲート内の観測値数の少なくとも1つに基づいて、目標毎に、複数種類の追尾フィルタのいずれを選択するかを判定し、該判定結果に応じた制御信号を生成する追尾フィルタ選択部5と、追尾フィルタ選択部で生成された制御信号によって示される追尾フィルタを実現するための処理を、目標毎に、実行する追尾フィルタ処理部1aおよび3aを備える。
(もっと読む)
目標追尾装置、目標追尾方法、及び、プログラム
【課題】誤相関を低減することにより、目標を追尾するのに好適な目標追尾装置、目標追尾方法、及び、プログラムを提供する。
【解決手段】電波を発生する電波発生部と、前記電波を放射し、目標から前記電波の反射波を受信する電波送受信部と、前記反射波を画像信号に変換する信号処理部と、前記画像信号から前記目標を検出する目標検出部と、前記画像信号に基づき、前記目標を表示する表示部と、前記目標検出部が検出した検出結果に基づいて、前記目標を追尾するゲートを発生するゲート発生部と、前記ゲート内に前記目標が存在する場合、前記ゲート外の前記画像信号を分離する信号分離部と、を備え、前記目標検出部は、前記信号分離部が分離した信号に基づき、前記目標を検出する。
(もっと読む)
運動クラス類別装置及び追尾処理装置
【課題】運動クラスの異なる複数の追尾フィルタのフィルタ処理結果に含まれる観測誤差の影響を低減して、目標の運動クラスに関する類別情報の確度を向上させた運動クラス類別装置、及びこの類別情報を用いて目標の追尾情報の確度を向上させた追尾処理装置を得る。
【解決手段】異なる運動クラス毎に設けられた複数のクラスフィルタにより観測ベクトルをフィルタ処理したクラス尤度を時系列に記憶しておき、最新の観測におけるクラス尤度を分析して分析尤度を導出する際は、この時系列の記憶内容を参照していずれかのクラス尤度が時間的に連続して所定のしきい値を超えた場合には各クラスフィルタで算出したクラス尤度を、またそれ以外の場合には所定の固定値を採用し出力することにより、時間的に連続しないような観測誤差等がクラス尤度に与える影響を低減するとともに、さらにその後段でのクラス確率算出時における誤差の累積を減らす。
(もっと読む)
追尾受信装置
【課題】 航空機等に搭載される追尾受信装置において、妨害継続時間を十分に確保させるために、受信機能部と妨害機能部とルックスルー受信を同期させる追尾受信装置を提供することを目的とする。
【解決手段】 ルックスルータイミング制御部から出力されたルックスルー周波数に基づいて受信スケジュール作成部が受信スケジュールを変更し、ルックスルートリガにより警戒受信部による到来電波の受信処理を開始させ、ルックスルートリガにより追尾受信部による目標のレーダ波の受信処理を開始させることにより、所定の警戒受信間隔と所定の目標追尾間隔とを同期させたことを特徴する。
(もっと読む)
レーダ装置
【課題】安定した目標追尾又は目標分離を行うため、目標の追尾状態に応じて適切なモードの動作を行えるように、所要とされる速度、距離又は角度分解能の目標情報を自動で出力することができるレーダ装置を得る。
【解決手段】データ設定部2Aにおいて、センサ制御部1Aからの動作モード、モードパラメータ及び速度分解能に基づき、速度分解能を満足するFFT数を算出し、目標検出部6へFFT数を含む信号処理パラメータを出力するとともに、目標検出部6において、データ設定部2AからのFFT数を含む信号処理パラメータに基づいた信号処理を行い、目標を検出する。
(もっと読む)
目標追尾装置
【課題】速度推定値の精度が悪い場合でも追尾継続が可能な目標追尾装置を得る。
【解決手段】ドップラ速度変化率が閾値を超えるか否かを判断し、ドップラ速度変化率が閾値を超えない場合には、直進目標用フィルタを選択し、ドップラ速度変化率が閾値を超える場合には、旋回目標用フィルタを選択するとともに、この時点におけるヘディングの値をヘディング基準値に設定し、その後、前記旋回目標用フィルタを選択した場合に、判定保留期間が経過するまで旋回目標用モデルを選択し、判定保留期間中に、現フレームのヘディングと前記ヘディング基準値の差異であるヘディング変化が閾値を超えるか否かを判断し、ヘディング変化が閾値を超える場合には、判定保留期間が経過した以降も旋回目標用モデルを選択し続け、ヘディング変化が閾値を超えない場合には、判定保留期間が経過した以降は直進目標用モデルを選択する追尾処理部20Aを設けた。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
船舶用目標追尾装置
【課題】自船の方位データに異常が発生しているか否かを知ることができる船舶用目標追尾装置を提供する。
【解決手段】Association判定部3は、目標追尾部2から出力された目標船のデータ(レーダ追尾目標データ)と、AIS処理部4から出力された他船のデータ(AIS目標データ)とを比較し、同一目標船と判定されたデータを分散判定部5へ出力する。分散判定部5は、レーダ追尾目標データに含まれる目標船の方位データと、AIS目標データに含まれる目標船の方位データとの差に基づく指標値を計算し、その指標値に基づいて、レーダ追尾目標データに含まれる方位データに異常が発生しているか否かを判定する。
(もっと読む)
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の機動の種類が等速旋回の場合には目標の針路は変化するが速さは一定であり、機動の種類が等速旋回直進加減速の場合には目標の速さは変化するが針路は一定であるが、従来の方法では、変化する諸元の追従の遅れの回復を早める一方、一定である諸元の誤差が大きくなることが課題であった。
【解決手段】目標の機動を検知時に目標諸元誤差予測値を大きめに調整する際に、機動の種類と目標の針路を考慮して、目標諸元誤差予測値を、変化している諸元の方向に大きめに、一定の方の諸元の方向に小さめに調整することにより、変化する諸元の追従の遅れの回復を早めながら、一定である諸元の誤差の増大を避けることを可能にする。
(もっと読む)
電子走査式精測レーダ装置および目標追尾方法
【課題】追尾目標の予測位置の算出精度を向上させ、かつ、信頼性が高い電子走査式精測レーダ装置を提供する。
【解決手段】捜索周期内の更新レートを擬似的に2倍に上昇させることによって、1つの目標に対して当該目標の位置および速度を検出するための追尾1−1と追尾1−2との2つの追尾を割り当てて、追尾1−1と前記追尾1−2とにより検出された当該目標の最新の位置および速度に基づいて、次走査時の予測位置を算出する。また、追尾1−1と追尾1−2との2つの追尾のうち、いずれかの追尾にコーストが発生した場合、もう一方の追尾に基づいて予測位置を算出する。追尾の対象とする目標として、最終着陸進入時の目標をレーダ表示部により選択指定することにより、当該目標の予測位置の算出を距離のみとし、高低角をグライドパス(GP)上、方位角をコースライン(CL)上に固定して、予測位置の算出を行う処理に切り替える機能を有する。
(もっと読む)
パッシブコヒーレント探索アプリケーションにおいて測定領域データを関連付けるシステムおよび方法
【課題】パッシブコヒーレント探索システムにおいて測定領域データを関連付けるシステムおよび方法を開示する。
【解決手段】検出レポートは、パッシブコヒーレント探索システムにおいて受信したターゲット信号と関係がある。検出レポートの測定値はターゲット信号のデータと関連がある。ライントラック状態推定機能部が、新しい検出レポートをライントラックと関連付け、ライントラックの更新状態を推定する。信号タイプを判定する。この信号タイプに応じて測定値についてカルマンフィルタを選択する。このカルマンフィルタに応じて検出レポートの測定値の誤差を計算する。この誤差に応じてライントラックに関連付ける検出レポートを選択する。ライントラックは、所定基準に従って更新中に合成するか、あるいは終了させることができる。さらに、新しいターゲットが検出されると新しいライントラックを初期化する。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法が開示される。
【解決手段】入力信号を受信、上記入力信号のチャネル歪みを補償後復調し、複素数値表現を形成、上記復調した入力信号から基準信号および目標物信号を推定し、上記基準信号の一部を減らすことであって、上記基準信号は、適応的にフィルタリングされ、出力目標物信号が形成され、上記基準信号の一部を減らすこと、上記出力目標物信号、基準信号に対して逆変換オペレーションを実施、上記出力目標物信号について、複数の目標物ビームを形成、ビームのそれぞれについて、間引きした複数のラグ積を形成、上記基準信号について、間引きした複数のラグ積を形成、ビームのそれぞれについてクロスアンビギュイティ関数を推定、上記基準信号についての上記間引きした複数のラグ積を用いて、上記基準信号についてオートアンビギュイティ関数を推定することを含む。
(もっと読む)
追尾レーダ装置
【課題】初探知目標の数が増大しても、捜索性能の劣化を防止でき、また、追尾移行時間が長くなることを防止できる追尾レーダ装置を提供する。
【解決手段】指定方向の空間に送信された送信波の反射波を受信する受信機4と、受信機からの受信信号に基づき目標を検出する目標検出部5と、目標検出部で検出された目標を表す目標検出情報に基づいて、目標を追尾するための追尾情報および初めて検出された目標である初探知目標を表す初探知情報を生成して出力する追尾制御部6と、追尾制御部から出力される追尾情報および初探知情報に基づいてビーム制御を行うレーダ制御部7とを備え、レーダ制御部は、追尾制御部から出力される初探知情報によって表される初探知目標が真目標であるかどうかを確認する検定処理として、検定専用の検定ビームによる検定処理または検定と捜索とが兼用される捜索ビームによる検定処理の何れかを選択する検定方式選択器12を備える。
(もっと読む)
1 - 20 / 23
[ Back to top ]